要把通过SolidWorks创建的机器人模型导出为URDF集成到ROS中,需要通过一个插件实现。
SolidWorks URDF导出插件的基础使用方法参考这篇文章
这里补充一些实用的操作。
通过添加草图实现基准轴和基准坐标系的定位
这需要你对SolidWorks的操作有一定的了解。
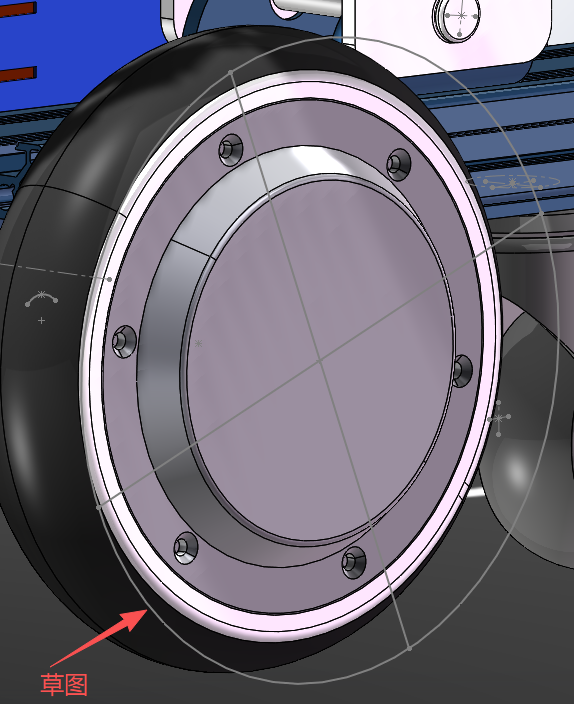
有时候机器人的结构件的模型是来自供应商的,或者这个结构并没有天然的点和线给我们设置基准轴和基准坐标系。这时候就需要我们自己去编辑这个零件,为它添加草图,并在这个草图上添加点和线,用来定位基准轴和基准坐标系。
比如图中的轮子,我们可以在轮子的一个面上添加一个草图用来设置基准坐标系。
多层级frame_id实现
机器人的frame_id往往是分成多个层级的,所以导出的时候需要特意为各个frame_id设置好正确的层级关系。
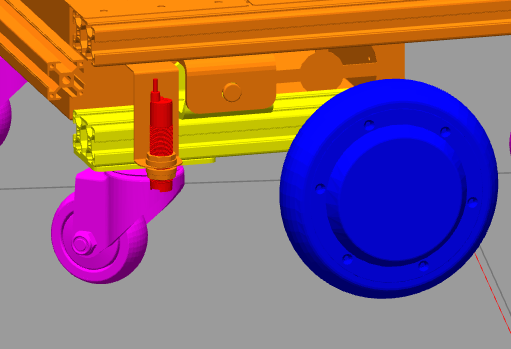
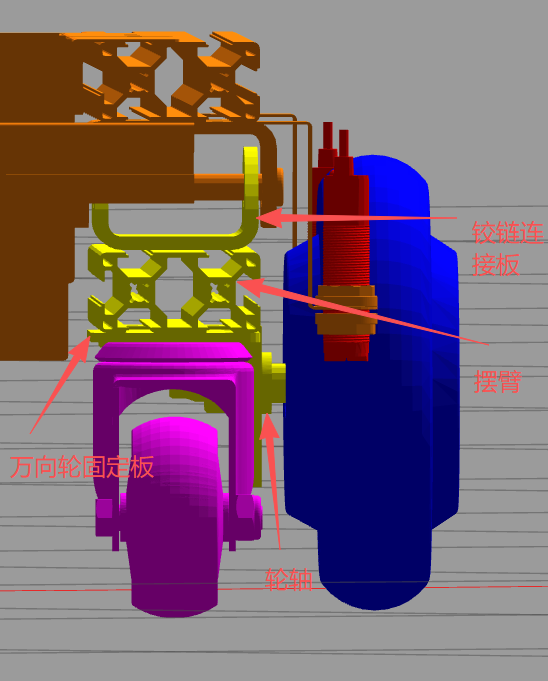
比如,机器人的主动轮(蓝色)装在悬挂摆臂(黄色)上,悬挂摆臂装在车体上(橙色)。那么frame_id的关系就是这样的:
c
base_link
|_ wheel_arm
|_wheel如果摆臂上还装有万向轮(粉色),而且万向轮往往有2个关节,第一个关节是竖直摆动旋转轴,第二个是轮子旋转轴,那么frame_id的关系就是这样的:
cpp
base_link
|_ wheel_arm
|_ wheel
|_ caster_vertical
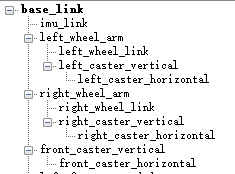
|_ caster_horizontal其中万向轮竖直摆动旋转轴和轮子是属于同一层级的,但是万向轮的轮子旋转轴是从属于万向轮竖直摆动旋转轴的,因为万向轮的轮子会随着万向轮的摆动而改变位置。
在导出插件中,实际的配置如图所示:
为每个frame_id选择正确的部件
在导出插件中,需要为每个frame_id选择属于这个frame_id的结构部件。
要做好这一步,需要把握一个原则:只选择随着这个frame_id运动且不随着其他frame_id运动的部件。
比如悬挂摆臂上连接着主动轮和万向轮,那么属于悬挂摆臂wheel_arm的部件只有下图中黄色部分。
虽然主动轮和万向轮都是固定在悬挂摆臂上的,但是因为它们有自己的frame_id,所以不属于wheel_arm。
同理可得,只有蓝色部分属于wheel;粉色部分的上部属于caster_vertical,粉色的轮子部分属于caster_horizontal。
解决导出后发现关节旋转方向错误的问题
如果哪个轮子的旋转方向不对,可以调整对应joint的z轴(一般把z轴作为旋转轴,如果不是z轴则调整对应的其他轴的符号)的符号,如:
xml
<joint name="LeftWheelJoint" type="continuous">
<origin xyz="0.0870424169783998 -0.102556655814713 0.0669000000015223" rpy="0 0 0.499407169293928" />
<parent link="left_wheel_arm" />
<child link="left_wheel_link" />
<axis xyz="0 0 1" /> <!-- 改这里,把-1改成1,或者把1改成-1 -->
</joint>解决机器人运行卡顿的问题
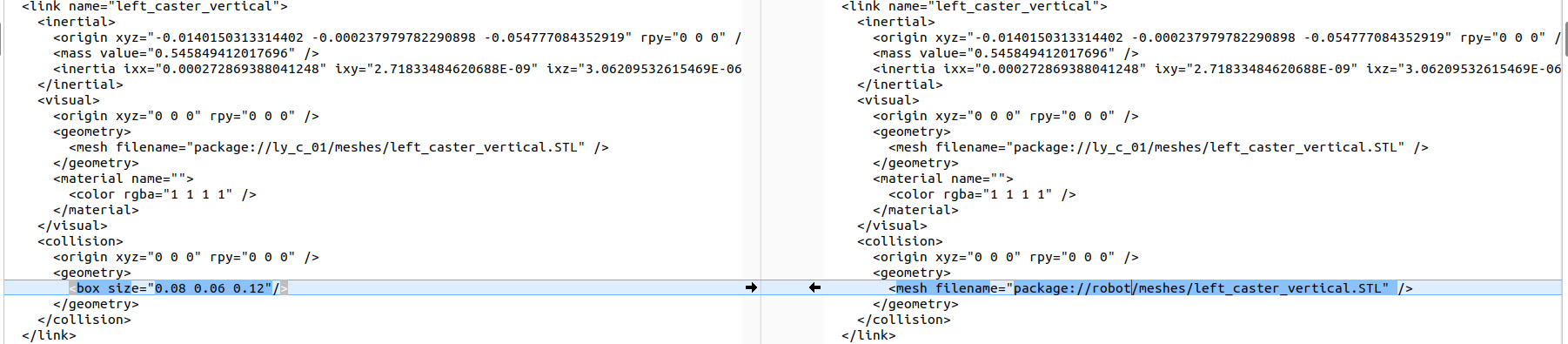
得到urdf并在gazebo中成功加载后,发现机器人运动卡顿,最后排查出来是万向轮的碰撞配置有问题。这会导致万向轮运行卡顿最终造成机器人运行卡顿。
通过把由msh文件定义碰撞空间改为由box模型定义可以解决卡顿问题。