在智能汽车、工业自动化和航天通信等高速发展的领域,数据交互的稳定性与安全性 已成为系统设计的关键。国科安芯研发的 ASM1042 系列 CANFD 通信接口芯片,以其卓越的性能与严苛的标准认证,为新一代高可靠性通信网络提供了坚实支撑,其具备以下的核心优势。
-
车规级认证 ASM1042I 通过 AEC-Q100 Grade1 认证 ,符合 ISO 11898-2:2016 和 ISO 11898-5:2007 标准,可放心应用于汽车电子、轨交及工业控制等关键场景。
-
高速传输 芯片支持 高达 5Mbps 的数据速率,并具备短对称传播延迟和快速循环特性,确保在复杂的负载 CAN 网络中依然能实现更快、更稳定的数据交换。
-
优异的 EMC 性能 在 SAE J2962-2 和 IEC 62228-3 标准下,即使在 500kbps 速率下运行,也无需额外共模扼流圈,大幅降低系统设计复杂度和成本。
-
全方位保护设计
-
ESD 防护高达 ±15kV
-
总线故障保护:±70V
-
欠压、热关断、驱动超时保护机制
-
保证器件在恶劣环境下仍具备长效耐用性
5.低功耗与智能唤醒 ASM1042支持待机模式及远程唤醒功能,满足新能源车和智能工业设备对 低能耗 与 智能互联 的双重需求。
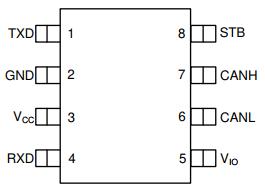
图1 CAN芯片引脚分布图
|------|------|------------------|
| 引脚序号 | 引脚名称 | 引脚功能 |
| 1 | TXD | 发送器数据输入端 |
| 2 | GND | 地 |
| 3 | VCC | 收发器 5V 供电 |
| 4 | RXD | 接收器输出端 |
| 5 | VIO | 收发器I/O供电电源 |
| 6 | CANL | 低电位CAN电压输入输出端 |
| 7 | CANH | 高电位CAN电压输入输出端 |
| 8 | STB | 待机模式控制端、高电平为待机模式 |
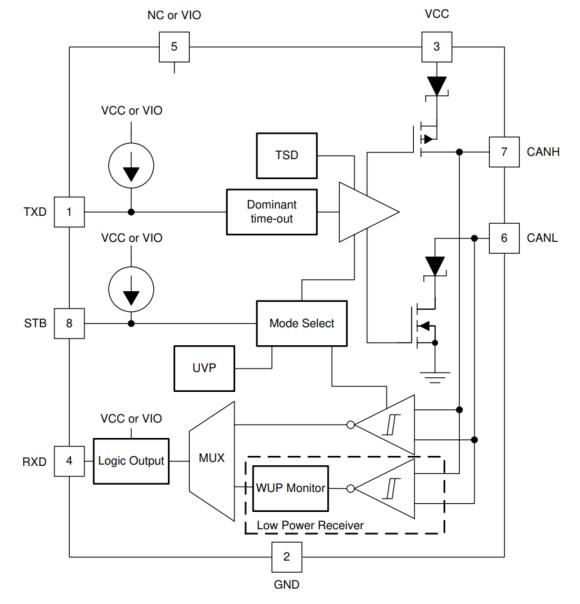
图2 内部电路结构框图
一、优异的通信性能
ASM1042系列严格符合 ISO 11898-2:2016 高速CAN 与 ISO 11898-5:2007 CAN FD 物理层标准,支持数据传输速率高达 5 Mbps,满足高速数据通信需求。其具有低环路延迟:典型循环延迟仅 110 ns,显性与隐性切换速度快,提高网络响应速度。ASM1042具有快速循环时间,短循环周期为负载总线提供额外时序裕量,使复杂系统中CAN节点通信更稳定。还具有负载适应性:在多节点、高负载的网络环境中仍能实现快速数据传输,保障系统实时性和可靠性。对于工业控制系统或车辆控制系统而言,这意味着数据传输更精准,系统反应更迅速,显著降低了因延迟导致的通信错误风险。
二、全面的功能安全与可靠性保障
ASM1042系列不仅满足高速通信需求,还为功能安全和关键任务应用提供多层次保障,具备企业航天级抗辐射能力,可在极端辐射环境下维持数据完整性,适用于航天及核能级应用。具有多重保护功能,ESD保护高达±15kV(人体放电模型),总线故障耐受 ±70V,芯片具有VCC和VIO欠压保护以及显性超时保护(TXD DTO)防止网络阻塞,其还具有热关断保护(TSD)确保芯片温度安全,这种多层次保护设计,让ASM1042在恶劣工业环境、车辆电气干扰或航空航天极端条件下依然保持稳定运行。
三、灵活的电源管理与I/O接口
ASM1042系列收发器设计灵活,兼容 3.3V 和 5V MCU,并支持独立 VIO电源输入,可设置 RXD 输出电平与输入阈值,适配不同逻辑电平系统。在低功耗待机模式:STB 高电平时,CAN收发器关闭发送器与接收器,功耗低至 0.5--5μA,显著降低能源消耗。在待机模式下,检测到特定总线帧即可唤醒RXD输出,确保系统随时可用。这一设计为节能型汽车电子、远程工业设备和低功耗航天系统提供了理想解决方案。
四、丰富的型号选择,覆盖多种应用场景
ASM1042I 系列针对不同应用场景推出了 工业级、汽车级、企业宇航级 多个版本,工作温度覆盖 -55℃ 至 125℃,并采用紧凑型 SOP8 封装,适配各种系统设计需求:
-
ASM1042I6S ------ 工业级,-40 ~ 85°C
-
ASM1042A3S ------ 汽车级,-40 ~ 125°C
-
ASM1042S2S ------ 企业宇航级,-55 ~ 125°C
应用场景
-
智能汽车电子(动力控制、ADAS系统、车身网络)
-
工业自动化与智能制造(PLC、机器人控制)
-
航空航天与国防通信(高可靠性网络互联)
-
轨道交通与能源系统
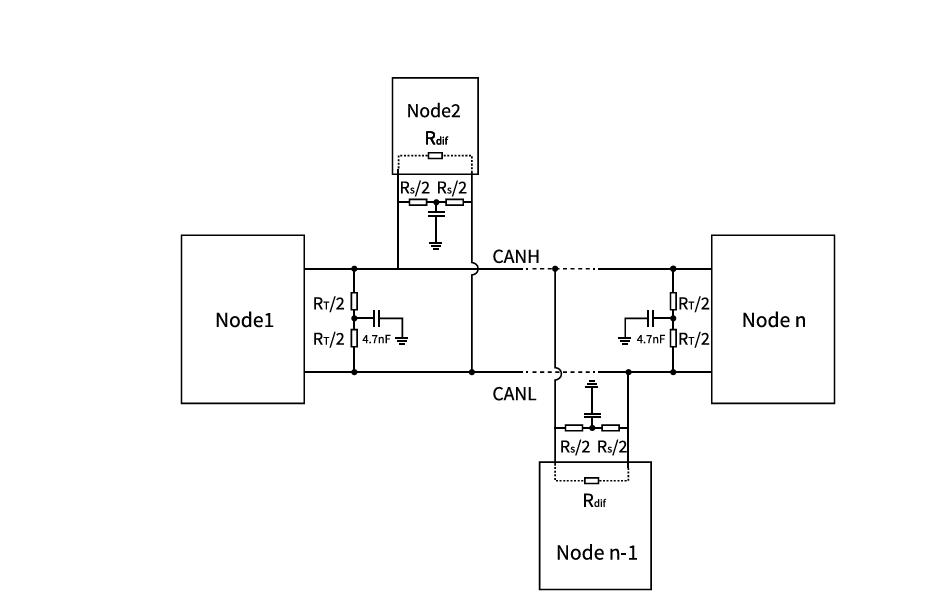
五、 CANFD 通信接口芯片的推荐多节点连接方式
CAN 总线的特征阻抗一般为120Ω,而CAN收发器隐性状态下的总线差分输入电阻为几十kΩ,发射节点的信号在经过总线传输到接收节点后,会发生信号反射,导致总线信号产生振铃,影响CAN网络的正常通信。在接收端并联一个与总线特征阻抗匹配的电阻后,可以吸收掉信号到达接收端的多余能量,避免振铃的产生,保证信号的传输质量。
总线负载电阻在45Ω~70Ω范围之间,提升总线的抗干扰性能,因为CAN 收发器的输入差分电阻阻值为几十kΩ,在总线隐性状态下,外部的一些轻微干扰通过几十kΩ的电阻就有可能在总线上产生满足显性的差分电压,改变总线状态,所以需要在总线处并联一个阻值较小的电阻来吸收外部的一些干扰,同时考虑到CAN收发器的总线输出电压范围,并联的电阻值应使得这一节点的外部等效负载电阻在45Ω~70Ω之间。
为进一步提升 CAN 收发器的EMC性能,建议将单个终端匹配电阻分为两个相等电阻串联的方式,并在中间节点通过电容连接到GND,如图所示。这样的连接方式可以为总线上的共模干扰提供额外的路径,进一步降低总线共模噪声的影响,同时也形成了一个RC低通滤波器,滤除一些高频噪声干扰。对于那些处于CAN网络中的一些中间节点,也可以采用这样的端接电阻方法,进一步提升中间节点的信号质量。