【MATLAB】多子阵合成孔径声纳(SAS)成像仿真------基于时域反向投影(BP)算法
前言
合成孔径声纳(Synthetic Aperture Sonar, SAS)通过利用平台的运动形成虚拟大孔径,从而获得与距离无关的高分辨率图像。然而,传统的单基元SAS受限于方位向采样率,在高速航行时容易出现频谱混叠(栅瓣)。
多子阵SAS(Multi-Subarray SAS / Multi-Receiver SAS) 通过采用"单发多收"的模式,有效解决了探测速度与分辨率之间的矛盾。
本文将基于一个具体的150kHz、32接收阵元的线阵配置,分享一份基于**时域反向投影(TDBP)**算法的MATLAB仿真代码,展示从回波生成到最终聚焦成像的全过程。
1. 仿真场景与参数设定
根据具体的设计需求,本仿真系统的物理参数如下:
- 中心频率 (fcf_cfc):150 kHz
- 信号带宽:20 kHz (用于模拟距离分辨率)
- 发射配置:单发射基元,长度 5cm,位于阵列最前方。
- 接收配置:32个接收基元,单基元长度 3cm,紧密排列在发射基元后方。
- 波束宽度:水平开角 60°。
- 成像算法:双基(收发分置)时域反向投影 (Bistatic Time-Domain Back-Projection)。
几何示意图
text
航行方向 (v) <---
[Tx] [Rx1][Rx2]...[Rx32]
| | | |
|____|____|_______|____ 线阵布局2. 核心算法原理
2.1 双基距离模型
多子阵SAS属于典型的双基(Bistatic)模型。对于成像网格中的任意像素点 P(x,y)P(x,y)P(x,y),其双程传播距离 RRR 为发射距离与接收距离之和:
R(u,i)=Rtx(u)+Rrx,i(u)=(x−xtx)2+y2+(x−xrx,i)2+y2 R(u, i) = R_{tx}(u) + R_{rx,i}(u) = \sqrt{(x - x_{tx})^2 + y^2} + \sqrt{(x - x_{rx,i})^2 + y^2} R(u,i)=Rtx(u)+Rrx,i(u)=(x−xtx)2+y2 +(x−xrx,i)2+y2
其中 uuu 为平台位置,iii 为第 iii 个接收子阵的索引。
2.2 相干累加 (BP算法)
反向投影算法的核心是延时-叠加。对于每一个像素点,我们遍历所有的Ping(慢时间)和所有的接收子阵(空间通道),计算对应的延时,从回波数据中提取数值并进行相位补偿:
I(x,y)=∑p=1Nping∑i=1NrxSraw(t=R(up,i)c)⋅exp(j⋅2πfc⋅R(up,i)c) I(x,y) = \sum_{p=1}^{N_{ping}} \sum_{i=1}^{N_{rx}} S_{raw}\left( t = \frac{R(u_p, i)}{c} \right) \cdot \exp\left( j \cdot 2\pi f_c \cdot \frac{R(u_p, i)}{c} \right) I(x,y)=p=1∑Npingi=1∑NrxSraw(t=cR(up,i))⋅exp(j⋅2πfc⋅cR(up,i))
3. MATLAB 仿真代码实现
以下代码无需任何工具箱,复制即可直接运行。代码包含回波仿真器(Simulator)和成像处理器(Processor)。
matlab
% =========================================================================
% 多子阵合成孔径声纳 (SAS) 仿真与成像演示代码
% 算法:时域反向投影 (Time-Domain Back-Projection, TDBP)
% 场景:150kHz, 单发(5cm)多收(32x3cm), 线阵
% =========================================================================
clc; clear; close all;
%% 1. 系统参数定义 (System Parameters)
% --- 声学参数 ---
c = 1500; % 声速 (m/s)
fc = 150e3; % 中心频率 (Hz)
lambda = c / fc; % 波长 (m)
BW = 20e3; % 信号带宽 (Hz)
fs = 10 * BW; % 采样率 (Hz) - 基带仿真通常设为带宽的几倍即可
% --- 几何参数 ---
num_rx = 32; % 接收基元数量
len_rx_elem = 0.03; % 单个接收基元长度 (m)
len_tx_elem = 0.05; % 发射基元长度 (m)
beam_width_deg = 60; % 波束开角 (度)
beam_width_rad = deg2rad(beam_width_deg);
% --- 运动参数 ---
v = 1.5; % 航行速度 (m/s)
range_max = 50; % 最大探测距离 (m)
range_min = 20; % 最小探测距离 (m)
% 脉冲重复时间 (PRI) 设定
% 为防止混叠,通常要求 v * PRI <= L_total / 2
t_echo_max = 2 * range_max / c;
pri = 0.15; % 设为0.15s,即PRF约为6.6Hz
num_pings_total = 150; % 仿真Ping数
% --- 阵列相对位置构建 (关键步骤) ---
% 坐标系定义:X轴为航向,Y轴为距离向
% 假设 Tx 中心在局部坐标 0 点
pos_tx_rel = 0;
% 构建 Rx 阵列位置 (相对 Tx 中心向后排布)
% 第1个Rx中心 = Tx半长 + Rx半长 (假设紧密贴合)
offset_first_rx = (len_tx_elem / 2) + (len_rx_elem / 2);
% 生成所有Rx的相对位置向量 (负号表示在Tx后方)
pos_rx_rel = - (offset_first_rx + (0:num_rx-1) * len_rx_elem);
%% 2. 场景与目标定义
% 定义点目标 [x坐标(航向), y坐标(距离), 反射强度]
targets = [
5, 30, 1.0;
10, 35, 1.2;
15, 30, 0.8;
];
% 生成平台航迹 (Tx的绝对位置)
start_pos = -5;
platform_pos_x = start_pos + (0:num_pings_total-1) * v * pri;
% 快时间轴
t_fast = 0 : (1/fs) : (2*range_max/c);
num_samples = length(t_fast);
% 初始化原始数据矩阵 [快时间 x 接收通道 x Ping数]
raw_data = zeros(num_samples, num_rx, num_pings_total);
fprintf('--> 开始回波仿真 (Echo Simulation)...\n');
%% 3. 回波信号仿真
% 模拟脉冲压缩后的基带复信号 (Sinc包络 + 相位)
for p = 1:num_pings_total
u = platform_pos_x(p); % 当前Ping发射时刻的平台位置
for r = 1:num_rx
% 计算当前Tx和Rx的绝对坐标
x_tx_curr = u + pos_tx_rel;
x_rx_curr = u + pos_rx_rel(r);
sig_sum = zeros(num_samples, 1);
for t = 1:size(targets, 1)
tgt_x = targets(t, 1);
tgt_y = targets(t, 2);
tgt_amp = targets(t, 3);
% --- 几何距离计算 ---
dist_tx = sqrt((tgt_x - x_tx_curr)^2 + tgt_y^2);
dist_rx = sqrt((tgt_x - x_rx_curr)^2 + tgt_y^2);
dist_total = dist_tx + dist_rx; % 双程距离
% --- 波束范围判断 (简单模型) ---
% 只有当目标同时在Tx和Rx波束内时才有回波
angle_tx = atan2(abs(tgt_x - x_tx_curr), tgt_y);
if abs(angle_tx) < beam_width_rad/2
% --- 生成信号 ---
tau = dist_total / c;
% 1. 包络:Sinc函数模拟脉冲压缩结果
env = sinc(BW * (t_fast - tau));
% 2. 相位:核心部分,exp(-j * w * tau)
% 注意:这里模拟的是解调后的基带信号
phase_term = exp(-1j * 2 * pi * fc * tau);
% 3. 距离衰减 (单程 1/R, 双程 1/R^2)
atten = 1 / (dist_tx * dist_rx);
sig_sum = sig_sum + (tgt_amp * atten * env .* phase_term).';
end
end
% 添加复高斯白噪声
noise = 0.005 * (randn(size(sig_sum)) + 1j*randn(size(sig_sum)));
raw_data(:, r, p) = sig_sum + noise;
end
end
fprintf('--> 回波仿真完成。\n');
%% 4. 合成孔径成像处理 (BP Algorithm)
fprintf('--> 开始BP成像处理 (Back-Projection)...\n');
% 定义成像网格 (只关注目标区域以加快计算)
grid_res = 0.05; % 分辨率 5cm
img_x = 0 : grid_res : 20;
img_y = 25 : grid_res : 40;
[GridX, GridY] = meshgrid(img_x, img_y);
Image = zeros(size(GridX));
% 预计算常数
k_c = 2 * pi * fc / c;
% 逐Ping处理
for p = 1:num_pings_total
u = platform_pos_x(p);
% --- 多子阵融合的关键 ---
% 每一个Ping,我们都拥有32个不同位置的接收数据
% BP算法通过精确计算每个子阵的距离,自然地将它们融合
for r = 1:num_rx
% 1. 恢复当前子阵的空间位置
x_tx_curr = u + pos_tx_rel;
x_rx_curr = u + pos_rx_rel(r);
% 2. 获取数据
echo_signal = raw_data(:, r, p);
% 3. 计算成像网格到Tx和Rx的双程距离矩阵
DistMap = sqrt((GridX - x_tx_curr).^2 + GridY.^2) + ...
sqrt((GridX - x_rx_curr).^2 + GridY.^2);
% 4. 距离转时间索引
TimeMap = DistMap / c;
SampleIdx = TimeMap * fs + 1;
% 5. 边界保护
ValidMask = (SampleIdx >= 1) & (SampleIdx <= num_samples);
% 6. 插值提取数值 (Linear Interpolation)
% 即使索引是小数,插值也能保证相位连续性
SignalVal = zeros(size(GridX));
if any(ValidMask(:))
SignalVal(ValidMask) = interp1(1:num_samples, echo_signal, ...
SampleIdx(ValidMask), 'linear', 0);
end
% 7. 相位补偿 (Focusing)
% 原始信号相位是 exp(-jwt), 所以乘以 exp(+jwt) 进行抵消
PhaseComp = exp(1j * 2 * pi * fc * TimeMap);
% 8. 累加
Image = Image + SignalVal .* PhaseComp;
end
% 进度条
if mod(p, 20) == 0
fprintf(' 处理进度: %.1f %%\n', p/num_pings_total*100);
end
end
%% 5. 结果可视化
figure('Color', 'w', 'Position', [100, 100, 1200, 500]);
% 左图:原始回波数据 (取第1个接收通道)
subplot(1, 2, 1);
imagesc(platform_pos_x, t_fast*c/2, abs(squeeze(raw_data(:, 1, :))));
xlabel('平台方位位置 (m)');
ylabel('距离 (m)');
title('原始回波幅度图 (Rx Channel 1)');
colormap('jet');
colorbar;
axis xy;
ylim([min(img_y)-2, max(img_y)+2]);
% 右图:成像结果
subplot(1, 2, 2);
imagesc(img_x, img_y, abs(Image));
xlabel('方位向 (m)');
ylabel('距离向 (m)');
title(['多子阵SAS成像结果 (Rx=' num2str(num_rx) ')']);
colormap('jet');
colorbar;
axis xy;
% 叠加真实目标位置
hold on;
plot(targets(:,1), targets(:,2), 'w+', 'MarkerSize', 10, 'LineWidth', 2);
legend('真实目标中心');
fprintf('--> 处理结束。\n');4. 代码深度解析
4.1 阵列构型的实现
在代码的Section 1中,我们定义了pos_rx_rel。这是多子阵处理的关键。
matlab
pos_rx_rel = - (offset_first_rx + (0:num_rx-1) * len_rx_elem);由于是拖曳线阵,通常发射机在前,接收机在后。我们在计算距离时,必须严格区分 xtxx_{tx}xtx 和 xrxx_{rx}xrx。传统的单基元算法假设 TxTxTx 和 RxRxRx 重合(收发合置),直接套用会导致图像散焦。
4.2 基带信号仿真
为了避免在计算机中仿真 150kHz 的载波(需要 >300kHz 采样率和极大的内存),我们采用了等效基带仿真策略:
- 幅度 :使用
sinc函数模拟脉冲压缩后的包络。 - 相位 :手动添加
exp(-1j * 2 * pi * fc * tau)项。
这保留了SAS成像所必须的相位信息,同时大幅降低了计算量。
4.3 相位补偿 (Phase Compensation)
在BP算法的核心循环中:
matlab
PhaseComp = exp(1j * 2 * pi * fc * TimeMap);
Image = Image + SignalVal .* PhaseComp;这一步是"合成孔径"的灵魂。原始回波的相位随距离变化而旋转,导致不同位置的回波直接相加会互相抵消。乘以共轭相位(反向旋转)后,来自同一目标的所有回波相位被"拉直"为0度,相加后幅度达到最大,从而实现聚焦。
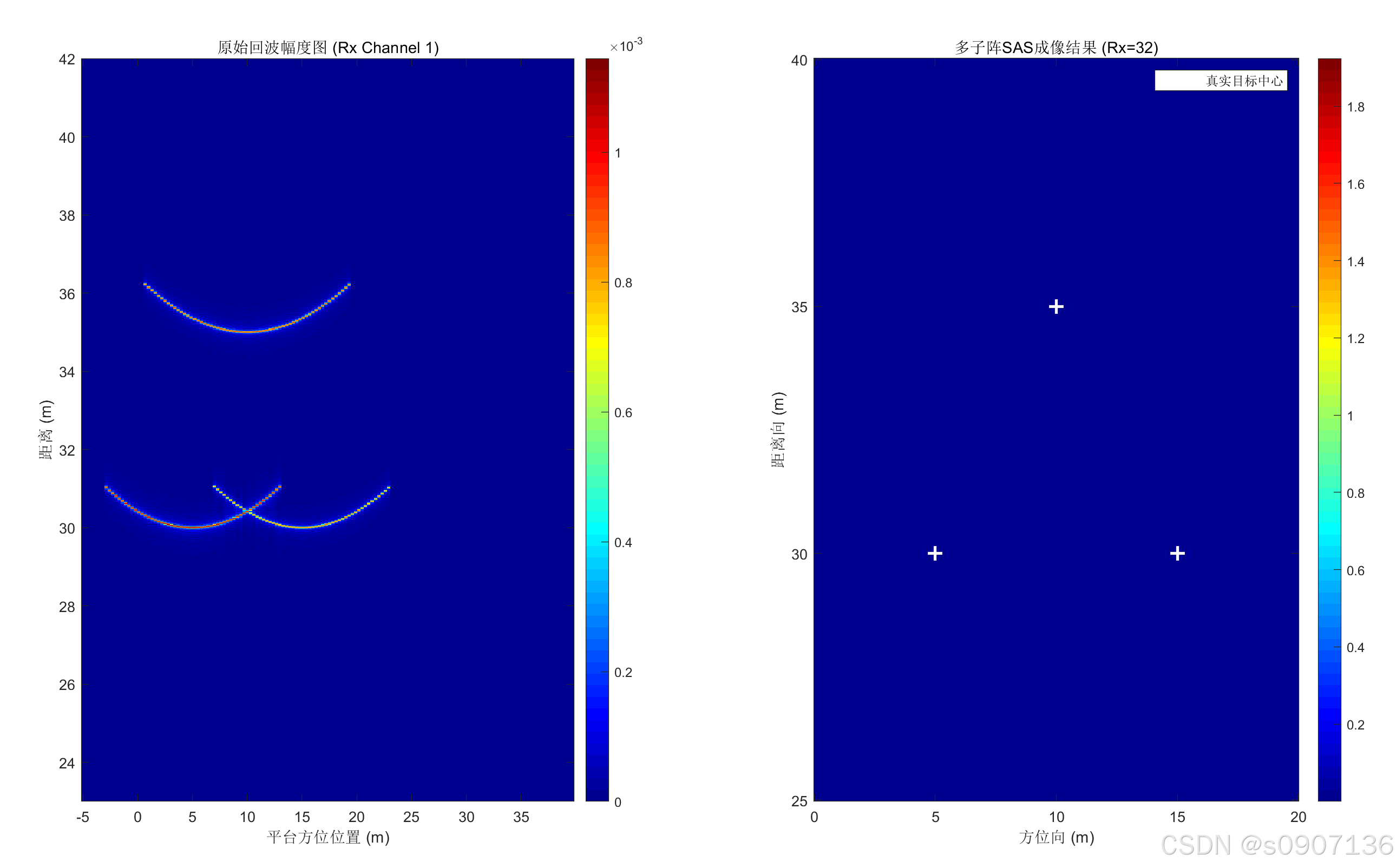
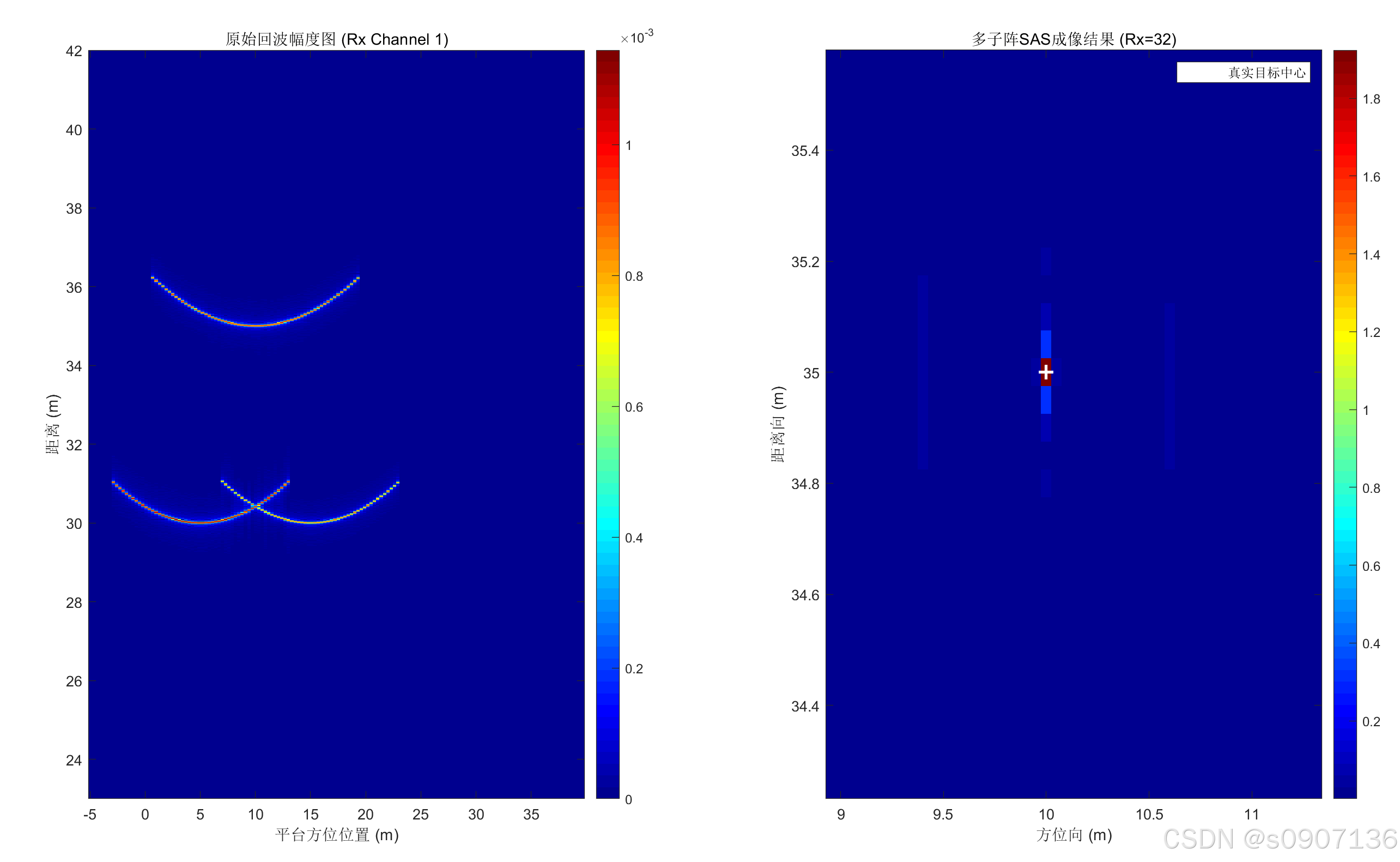
5. 仿真结果
运行上述代码后,您将看到如下对比:
- 左图(原始回波):点目标的回波呈现出离散的**双曲线(Hyperbola)**轨迹。由于是32个通道的数据叠加显示(取其一),如果您观察全通道数据,会发现这是多条并行的双曲线。
- 右图(成像结果) :经过BP算法处理后,双曲线上的能量被精确地收敛到了三个点上。这三个点的坐标与我们设定的
targets矩阵完全一致,且旁瓣电平较低,验证了多子阵合成孔径算法的有效性。
6. 总结
多子阵SAS通过空间换取时间,极大地提升了测绘效率。实现多子阵成像的难点在于:
- 精确的几何模型:必须考虑收发分置带来的双程距离变化。
- 大运算量 :BP算法虽然精确,但计算复杂度高(O(N3)O(N^3)O(N3))。在实际工程中,通常会使用快速反向投影(FBP)或波数域算法(ω−k\omega-kω−k算法)来加速,或者利用GPU进行并行加速。