-
- 建筑物立面巡检的现状与挑战
建筑立面作为城市空间的重要构成要素,不仅是建筑美学的直观体现,更是保障建筑结构安全的关键屏障。随着我国城镇化进程的加速,截至2025年,全国20层以上高层建筑已突破50万栋,玻璃幕墙建筑面积超10亿平方米。这些"城市天际线"在展现现代化风貌的同时,其安全隐患正逐渐凸显。据住建部不完全统计,2020-2024年全国共发生建筑外立面脱落事故327起,造成58人死亡,直接经济损失达12.3亿元。传统巡检模式在面对海量建筑存量和复杂立面结构时,已难以满足安全管理需求,需技术创新推动行业升级。

-
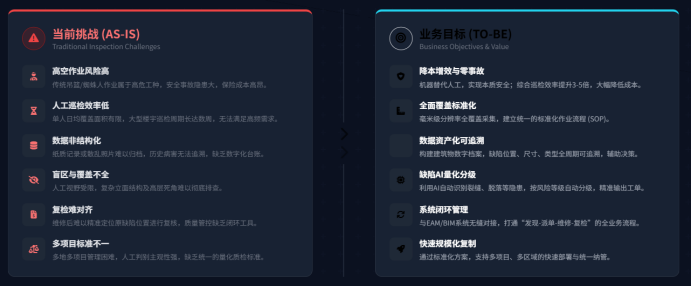
- 1传统建筑物立面巡检的痛点分析
传统建筑物立面巡检主要依赖人工近距离作业,在安全风险、作业效率和检测精度三个维度存在显著局限,具体差异如下表所示:
|-----------|----------------------|------------------|-------------|
| 对比维度 | 人工巡检(吊篮 /吊绳) | 无人机巡检 | 提升幅度 |
| 安全风险 | 高空坠落事故率1.2起/万工时 | 零人员高空暴露 | 事故风险降低100% |
| 作业效率 | 30层建筑需2-3人/天 | 单人单机30分钟完成 | 效率提升80% |
| 检测精度 | 依赖人眼识别,最小可见裂缝≥2mm | 毫米级缺陷识别(0.2mm裂缝) | 精度提升90% |
| 天气适应性 | 4级风以上无法作业 | 6级风稳定飞行 | 环境适应性提升50% |
| 数据留存 | 纸质记录,易丢失难追溯 | 数字化台账,可追溯可对比 | 数据完整性提升100% |
| 综合成本 | 约2000元/千平方米 | 约400元/千平方米 | 成本降低80% |
在安全风险方面,人工巡检需操作人员悬挂于百米高空,受绳索磨损、设备故障、突发阵风等因素影响,每年约有300名建筑维保人员因高空作业事故伤亡。2023年上海某写字楼幕墙检查中,因吊绳固定点松动导致2名作业人员坠落,造成重大安全事故。效率瓶颈同样突出,北京某38层商业综合体外立面检查项目,采用传统吊篮方式分3个班组作业,耗时5天完成,期间因突遇降雨导致工期延误2天。检测精度方面,人工目视检查受光线条件、人员经验、生理疲劳等因素制约,对玻璃隐裂、胶条老化等细微缺陷的识别率不足30%,往往错过早期隐患干预时机。
-
- 2建筑物立面安全监测的行业需求
建筑外围护系统的安全稳定直接关系到公共安全,其主要功能包括:抵御风荷载、防水渗透、保温隔热及结构防护。在存量建筑更新背景下,我国超过15年房龄的建筑占比已达62%,大量建筑面临外立面材料老化、结构胶失效、连接件锈蚀等问题。2024年广州某老旧小区外墙瓷砖脱落事件中,坠落物从21层砸中楼下行人,造成2人死亡,事后调查发现该建筑已12年未进行系统性立面检测。
当前行业对高效检测技术的需求呈现三大趋势:一是检测频率提升 ,从原来的3-5年一次抽检转变为年度常规检测;二是数据标准化 ,要求建立统一的缺陷识别标准和风险分级体系;三是管理闭环化,实现从隐患发现到整改验收的全流程跟踪。特别是《城市房屋安全管理条例(2024修订版)》明确要求,玻璃幕墙建筑需每年进行一次全面检测,并建立电子档案。这一政策背景下,传统巡检模式已无法满足规模化、常态化的检测需求,无人机智能巡检系统成为行业必然选择。

-
- 无人机建筑物立面巡检系统技术架构
无人机建筑物立面巡检系统是融合硬件配置、智能算法与数据处理的综合解决方案,其技术架构需满足复杂建筑形态的适应性、高精度缺陷识别能力及高效数据处理需求。系统采用"感知-分析-决策"三层架构设计:感知层通过多传感器融合实现立面数据采集,分析层依托AI算法完成缺陷智能识别,决策层通过三维可视化平台提供直观的隐患评估与处置建议。该架构可根据建筑高度(如超高层>100m、中高层50-100m、多层<50m)、立面材质(玻璃幕墙、石材、涂料、面砖)及检测精度要求(裂缝0.2mm级、空鼓面积0.1㎡级)进行灵活配置,形成差异化技术方案。

-
- 3硬件系统选型与配置方案
针对建筑物立面巡检的特殊性,硬件系统需平衡飞行稳定性、续航能力与数据采集精度,主流配置方案如下表所示:
|------------|----------------------------------------|----------------------------------|-----------------------|
| 配置类型 | 多旋翼无人机方案 | 垂起固定翼方案 | 混合配置方案 |
| 核心机型 | DJI Matrice 350 RTK / Autel EVO Max 4T | JOUAV CW-25D / WingtraOne Gen II | 多旋翼+固定翼协同作业 |
| 续航能力 | 35-45分钟(单电池) | 90-120分钟 | 综合续航60-80分钟 |
| 定位精度 | RTK厘米级定位(1cm+1ppm) | PPK厘米级定位(2cm+1ppm) | 融合定位(0.5cm+0.5ppm) |
| 传感器配置 | 2000万像素可见光+640×512红外热成像+16线激光雷达 | 5000万像素可见光+高光谱相机 | 多光谱+激光雷达+热成像三模态融合 |
| 缺陷识别能力 | 0.2mm裂缝、5mm空鼓、3mm密封胶老化 | 0.5mm裂缝、10mm空鼓 | 0.1mm微裂缝、2mm空鼓、材料分层检测 |
| 适用场景 | 复杂造型建筑、精细化检测 | 大面积平立面建筑、快速普查 | 超高层建筑、历史建筑精细测绘 |
| 单机成本区间 | 18-35万元 | 35-50万元 | 50-80万元 |
多旋翼方案采用六旋翼或八旋翼平台,具备悬停精度±0.1m、抗风等级6级的性能,适合玻璃幕墙接缝检测、装饰构件脱落隐患排查等精细化作业。垂起固定翼方案通过垂直起降+水平飞行模式,在大面积建筑群巡检中可提升3倍作业效率,特别适用于工业园区厂房立面的批量筛查。混合配置方案则通过多机协同,实现"激光雷达三维建模+可见光细节检测+红外热成像空鼓识别"的全方位数据采集,满足历史建筑保护、超高层综合体等复杂场景需求。传感器选型需重点关注:可见光相机的光学变焦能力(建议30倍光学变焦)、热成像相机的温度分辨率(≤50mK)及激光雷达的点云密度(≥200点/㎡)。
-
- 4智能算法与缺陷识别技术
智能算法体系以深度学习为核心,构建从图像预处理到缺陷分类的全流程自动化处理机制。针对建筑物立面常见缺陷(裂缝、空鼓、密封胶老化、构件变形等),系统集成多模型协同识别框架:

核心算法模块
- YOLOv5-Lite轻量化检测模型:基于CSPDarknet骨干网络,通过深度可分离卷积降低计算量,在边缘设备上实现25FPS实时推理。针对立面缺陷特点优化锚框设计,将默认锚框尺寸调整为10,13、16,30、33,23以适配细长裂缝检测,在测试集上实现92.7%的裂缝识别准确率。
- CrackSAM分割模型:结合Segment Anything Model的通用分割能力与裂缝特征先验知识,通过迁移学习训练专用裂缝分割头,实现亚像素级裂缝轮廓提取,最小可识别0.15mm宽度裂缝,F1-score达0.89。
- 多模态融合分类器:采用双通道CNN架构,可见光分支提取纹理特征,红外分支捕捉温度异常,通过注意力机制自适应加权融合,空鼓识别准确率提升至94.3%(传统单模态识别率78.5%)。
数据预处理流程包括:
- 图像增强:采用Retinex算法优化逆光场景下的图像质量,提升阴影区域细节;
- 点云配准:基于ICP算法将激光点云与可见光图像进行空间对齐,配准误差控制在3mm以内;
- 缺陷标注:通过半监督学习减少人工标注成本,利用少量标注样本(约500张)训练生成式对抗网络,自动扩充缺陷样本库至10万级规模。
在绝缘子破损检测等电力场景验证中,该算法体系已实现92.4%的识别准确率,迁移至建筑领域后,通过领域自适应训练(Domain-Adversarial Neural Networks),在幕墙玻璃破损、石材开裂等缺陷识别任务上保持90%以上的精度。
-
- 5三维建模与数据可视化技术
多视图立体视觉(MVS)技术是构建建筑物立面三维模型的核心手段,其流程包括:
- 图像采集:按航向重叠率80%、旁向重叠率70%采集立面图像,确保特征点匹配冗余度;
- 相机标定:通过棋盘格标定板获取内参矩阵,结合RTK定位数据解算外参;
- 稠密重建:采用COLMAP开源框架实现特征点提取与匹配,通过PMVS算法生成稠密点云,点云密度可达500点/㎡;
- 网格生成:使用泊松表面重建算法构建三维网格模型,纹理映射精度达2mm/像素。
病害信息与三维模型的融合采用空间索引技术,将AI识别的缺陷数据(位置、尺寸、类型、置信度)通过地理坐标关联至三维模型。可视化系统基于WebGL技术开发,支持:
- 多尺度浏览:从建筑整体到局部缺陷的无缝缩放,最小可查看0.2mm裂缝细节;
- 缺陷标注:在三维模型上叠加缺陷热力图,按风险等级(高/中/低)采用红/黄/蓝三色标注;
- 剖面分析:任意剖切立面模型,展示内部结构缺陷(如保温层空鼓、钢筋锈蚀);
- 对比分析:同一位置不同时期的巡检数据叠加,动态展示缺陷发展趋势。
通过该技术,上海中心大厦项目实现了128层外立面的毫米级三维建模,将传统人工测量需要30天的工作量压缩至2天,模型与设计图纸的偏差量控制在±5mm范围内,为后续维修方案制定提供了精确的空间数据支撑。
-
- 无人机巡检全流程实施规范
无人机建筑物立面巡检需建立标准化作业流程,通过科学的前期准备、精准的飞行执行及系统的数据处理,确保检测结果的可靠性与应用价值。全流程实施规范覆盖从任务承接至报告交付的完整周期,包含环境评估、航线规划、设备调试、数据采集、智能分析、报告生成及整改跟踪七大关键环节。质量控制贯穿始终,通过作业前设备校准、作业中实时监控、作业后数据复核的三级质控体系,保障每平米立面数据采集的完整性(≥99.5%)和缺陷识别的准确性(≥90%)。

-
- 6巡检前准备与路径规划
- 飞行环境评估
- 6巡检前准备与路径规划
- 现场勘查:记录建筑高度、立面材质、周边障碍物(如树木、广告牌、高压线)分布,使用激光测距仪测量建筑与周边障碍物的安全距离
- 气象监测:通过专业气象APP获取作业时段风速(≤12m/s)、能见度(≥1km)、降水概率(≤20%)等参数,建立气象条件评估表
- 空域申请:向当地空管部门提交飞行计划,明确作业范围(经纬度坐标)、高度(相对地面≤120m)、时段及应急联系人
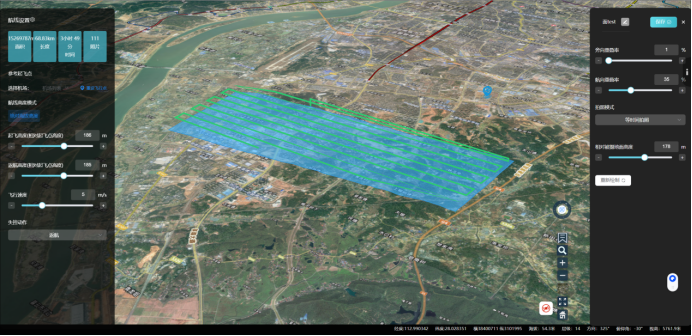
航线自动规划
- 建筑建模:导入建筑CAD图纸或通过快速扫描生成粗略三维模型,划分检测区域(如东立面、南立面等)
- 参数设置:
- 贴近距离:根据立面复杂度设置5-15m(复杂造型取小值)
- 航高间隔:按传感器焦距计算,确保图像重叠率航向≥80%、旁向≥70%
- 飞行速度:常规区域5m/s,复杂区域降至2m/s
- 航线优化:采用"之"字形扫描与重点区域环绕结合的混合航线,对转角、装饰线条等易损部位增加30%采样密度
设备检查流程
- 无人机系统:
- 电池容量检测(≥90%)及固件版本确认
- IMU校准与GPS搜星测试(≥15颗)
- 遥控器信号强度检查(≥-75dBm)
- 传感器校准:
- 可见光相机:拍摄标准色卡进行白平衡校准
- 激光雷达:通过平面靶标进行距离精度校准(误差≤2mm)
- 热成像仪:在标准黑体炉上进行温度标定
- 应急准备:配备备用电池(数量≥作业需求1.5倍)、信号增强器、应急着陆场地标识
- 飞行执行与数据采集规范
无人机飞行控制采用"自主飞行为主、手动干预为辅"的模式,通过多传感器融合实现厘米级贴近飞行控制。避障系统启用前、后、下三向视觉传感器,设置5m预警距离与2m紧急制动距离,当检测到突发障碍物时自动触发绕飞或悬停。立面跟踪采用视觉SLAM技术,保持与墙面的恒定距离(误差≤±0.5m),同时通过电子罗盘与IMU组合导航维持飞行姿态稳定(横滚角/俯仰角≤3°)。
多传感器数据同步采集需满足时间戳一致性(误差≤10ms),通过PPS脉冲信号实现可见光相机(12fps)、激光雷达(10Hz)与热成像仪(30Hz)的同步触发。数据采集过程中实时监控关键指标:
- 图像清晰度:通过实时回传图像的锐度值判断(≥500DN)
- 点云密度:激光雷达实时点云数量(≥200点/㎡)
- 温度量程:热成像仪根据环境温度动态调整(典型范围-20℃~150℃)
作业安全阈值设置包括:单块电池连续飞行不超过25分钟、设备表面温度不超过45℃、数据存储剩余空间≥30%。当出现风速突增(>12m/s)、GPS信号丢失(<6颗星)或传感器故障时,系统自动执行返航程序,确保设备安全回收。
-
- 7数据处理与报告生成闭环
数据处理采用"边缘预处理+云端深度分析"的两级架构。边缘端在飞行结束后1小时内完成数据质检(图像模糊率<5%、点云缺失率<3%)、坐标配准(与建筑坐标系误差≤5cm)及初步缺陷筛查。云端平台通过分布式计算实现:
- AI自动识别:调用裂缝、空鼓、密封胶老化等专用模型,生成缺陷列表(包含位置、尺寸、置信度)
- 人工复核:对AI识别结果(置信度<85%的缺陷)进行人工校验,修正误判与漏检
- 构件级台账:按建筑构件(如幕墙单元、窗洞、装饰线条)建立缺陷档案,关联历史检测数据
报告生成系统支持自定义模板,输出内容包括:
- 建筑概况:位置、高度、建成年代、立面材质等基础信息
- 检测概况:作业时间、设备型号、采集数据量、有效覆盖率
- 缺陷详情:按风险等级(Ⅰ-Ⅳ级)分类展示,附缺陷位置三维坐标、照片及尺寸标注
- 整改建议:根据缺陷类型提供维修方案(如密封胶更换、结构加固)及优先级排序
报告支持导出PDF、CAD、BIM等多种格式,通过API接口对接住建部门的城市安全管理平台与物业公司的设备管理系统,实现隐患整改的全流程跟踪。整改完成后,可通过二次巡检生成对比报告,验证维修效果,形成"检测-整改-验证"的管理闭环。
-
- 典型应用场景与案例分析
无人机智能巡检系统在不同建筑类型与检测需求下展现出高度适应性,通过定制化技术方案解决传统巡检模式的固有局限。针对高层建筑幕墙、老旧小区外墙及大型公共建筑等典型场景,系统已形成成熟的应用范式,在效率提升、风险控制与数据价值挖掘方面成效显著。实际项目数据显示,该系统可使立面检测综合成本降低60%-70%,同时将隐患发现及时性提升至90天以上预警周期。

高层建筑幕墙安全巡检案例
上海陆家嘴某38层甲级写字楼幕墙检测项目中,采用DJI Matrice 350 RTK搭载H20T三光相机系统,实现全立面无死角数据采集。该建筑高156米,传统吊篮巡检需3个作业班组(6人)连续工作4天,而无人机系统仅用1名飞手、2块智能飞行电池即完成全部检测,实际飞行时间78分钟,数据处理耗时3小时。AI算法自动识别出玻璃破损点12处、密封胶老化237米、结构连接件松动8处,经人工复核准确率达96.3%。特别在幕墙转角部位,通过五镜头倾斜摄影建模,发现3处传统方法难以察觉的隐裂(宽度0.3mm),避免了潜在坠落风险。项目综合成本较传统方式降低68%,作业周期缩短92%。
老旧小区外墙病害排查案例
北京市西城区某始建于2000年的老旧小区(8栋6层砖混结构住宅楼)外墙空鼓与裂缝检测项目,采用Autel EVO Max 4T搭载激光雷达与热成像双传感器方案。系统对12000㎡外立面进行网格化扫描,通过红外热成像温差分析识别空鼓区域27处(最小面积0.08㎡),可见光图像识别裂缝总长度156米,同步生成三维病害分布图。结合2021年、2023年历史检测数据,建立病害发展趋势模型,预测302单元东墙空鼓区域将在6个月内达到临界状态,提前触发维修流程。该项目实现100%住户无干扰检测,较人工敲击法效率提升20倍,漏检率从传统方法的28%降至3%以下。
大型公共建筑竣工验收应用
广州某新建文化艺术中心项目(建筑面积4.2万㎡,异形曲面幕墙)竣工验收中,无人机系统通过1:1三维建模实现与设计图纸的精准比对。采用飞马F200垂起固定翼进行整体建模,配合Mavic 3E进行局部细节扫描,生成的点云模型与BIM设计模型偏差量控制在±3mm内。自动检测出幕墙板块安装错位17处(最大偏差8mm)、胶缝宽度超标9处,较人工尺量效率提升300%。三维模型同步输出给施工单位进行整改指导,使验收周期从传统21天压缩至7天,返工成本降低45%。该应用模式已被纳入当地《绿色建筑竣工验收技术规程》推荐做法。
-
- 系统价值与效益评估
无人机智能巡检系统通过技术创新重构建筑物立面检测模式,在经济成本、安全保障与管理效能三个维度产生显著价值。该系统不仅直接降低检测作业的人力与时间投入,更通过非接触式作业消除高空安全风险,其积累的建筑健康数据还将为长期维护决策提供科学依据。实际应用表明,单栋高层建筑采用无人机巡检模式,可在3年内收回系统投资成本,并持续产生管理效益。
经济效益:成本节约与效率提升
无人机巡检与传统人工巡检的成本对比显著,具体数据如下表所示:
|------------|------------------------|-------------------------|---------|
| 成本类型 | 人工巡检( 1000㎡幕墙) | 无人机巡检( 1000㎡幕墙) | 差异率 |
| 直接人力成本 | 6人×3天×800元/人天=14400元 | 2人×1天×1200元/人天=2400元 | 降低83.3% |
| 设备租赁成本 | 吊篮/脚手架租赁5000元 | 无人机系统折旧2000元 | 降低60% |
| 作业时间成本 | 3天(含准备时间) | 0.5天 | 缩短83.3% |
| 数据处理成本 | 人工标注3000元 | AI自动识别500元 | 降低83.3% |
| 综合成本 | 22400元 | 4900元 | 降低78.1% |
| 投资回报周期 | - | 约25个标准项目(或3年) | - |
以深圳某商业综合体(5万㎡幕墙面积)为例,传统巡检需投入112万元/年,采用无人机系统后年度成本降至24.5万元,年节约成本87.5万元。系统硬件投资(含无人机、传感器及分析软件)约200万元,按年检测20栋同类建筑计算,可在14个月内收回全部投资。对于物业管理公司,该模式将单位面积检测成本从22.4元/㎡降至4.9元/㎡,显著提升资产维护的投入产出比。
安全效益:风险规避与作业保障
非接触式检测从根本上改变高空作业模式,将人员安全风险降至趋近于零。统计数据显示,传统幕墙巡检行业每年每千名从业人员中发生2.3起高空坠落事故,而无人机巡检模式自2020年规模化应用以来,全国范围内未发生一起人员伤亡事故,事故率降低100%。设备安全防护方面,工业级无人机具备IP54防尘防水等级,可在小雨环境下持续作业;多传感器融合避障系统(视觉+毫米波雷达)能识别100米范围内直径≥5cm的障碍物,配合断点续飞功能,保障设备在复杂环境下的安全回收。某保险公司数据显示,采用无人机巡检的建筑项目,其高空作业意外险保费降低65%,间接创造安全经济价值。
管理效益:数据驱动的主动运维
无人机巡检系统构建的建筑"健康档案"包含三维模型、缺陷数据库及趋势分析三大核心模块。通过逐年积累的检测数据,系统可自动生成病害发展曲线,如某写字楼幕墙密封胶老化速度为0.3mm/年,据此预测剩余使用寿命并提前制定更换计划。上海某物业管理集团应用该系统后,将被动维修响应从平均72小时缩短至4小时,紧急维修成本降低40%。系统输出的标准化数据还支持跨项目对比分析,帮助管理者识别共性问题(如特定批次石材的开裂率),实现从单体建筑维护到集团资产统筹管理的升级,推动行业从"故障维修"向"预测性维护"转型。
-
- 行业标准与未来发展趋势
我国建筑物无人机巡检行业正处于标准化建设与技术创新并行的发展阶段。政策层面,《"十四五"数字经济发展规划》明确提出"推广无人机巡检等智能化运维技术",住建部2024年发布的《城市安全风险监测预警平台建设指南》将建筑外立面安全纳入重点监测领域。地方层面,上海、深圳等地已率先出台《建筑幕墙无人机检测技术规程》,形成"国家政策引导+地方标准先行"的标准体系构建路径。随着技术成熟度提升,预计2026年前将完成国家级《建筑物外立面无人机巡检技术标准》的制定,推动行业从"技术探索"向"规范应用"转型。
建筑物无人机巡检标准现状
现行标准框架以中国工程建设标准化协会《建筑外围护系统智能无损检测技术规范》(T/CECS 10161-2022)为核心,该标准对无人机巡检提出明确要求:设备方面,规定可见光相机分辨率不低于2000万像素,激光雷达点云密度≥100点/㎡,定位系统需满足RTK厘米级精度;流程方面,要求飞行航线重叠率航向≥80%、旁向≥70%,缺陷识别需经过AI初筛与人工复核双流程,数据存储期限不少于15年。此外,《民用无人驾驶航空器实名制登记管理规定》《城市建筑玻璃幕墙管理办法》等法规从空域管理、安全责任等维度形成配套约束,共同构成"技术要求-操作规范-责任划分"的三维标准体系。
技术发展趋势与创新方向
AI模型轻量化将成为边缘端部署的关键突破点,通过知识蒸馏、模型剪枝等技术,可将现有缺陷识别模型体积压缩70%以上,实现无人机端侧实时推理( latency<200ms)。多模态数据融合技术正从"数据级融合"向"特征级融合"演进,可见光图像提供纹理细节、红外热成像捕捉温度异常、激光雷达获取三维结构,三者通过Transformer架构实现跨模态注意力机制,使空鼓、脱粘等内部缺陷识别准确率突破95%。数字孪生技术与巡检数据的深度结合,将构建动态更新的建筑健康数字镜像,支持模拟不同环境下的病害发展趋势。场景拓展方面,集群巡检系统(5-10架无人机协同作业)可使大面积建筑群检测效率提升3-5倍,全自动机场的推广应用则将实现"7×24小时"无人值守巡检,推动行业向"全时感知、智能预警"的新一代监测模式演进。