目录
1.摘要
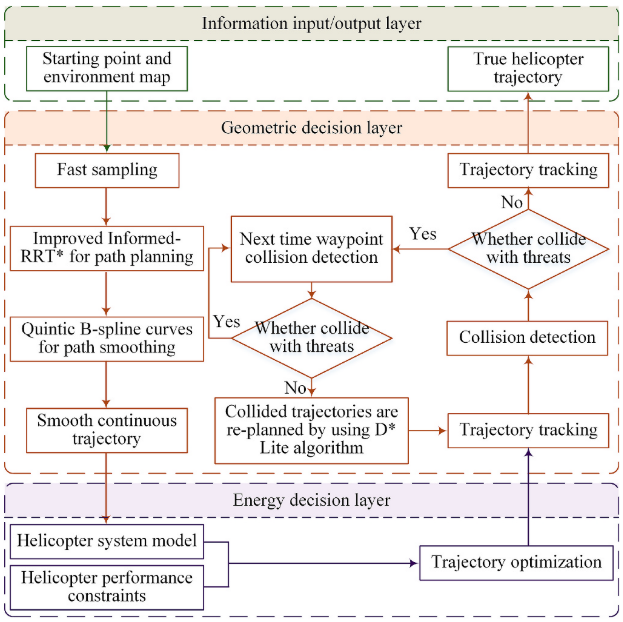
直升机因机动性强、响应快、受地形限制少,广泛用于森林火灾救援。但火场环境动态多变,预规划航线可能使直升机误入高温浓烟等高风险区域,威胁飞行安全。为此,本文构建面向森林火灾的多威胁环境模型,并结合救援直升机性能差异,提出考虑机型异构性与环境动态性的改进 IRRT*-D* 轨迹规划算法,该算法融合 Informed-RRT* 的快速搜索能力与 D* Lite 的路径优化优势,可在动态火场中实时生成安全高效的飞行路径。
2.直升机轨迹规划
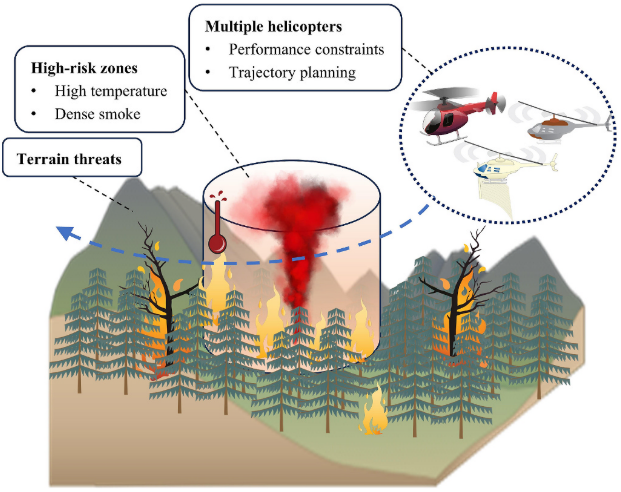
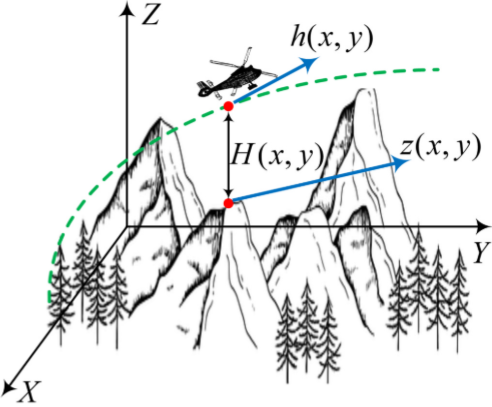
森林火灾救援直升机轨迹规划中,需综合考虑环境条件、火灾威胁及飞行安全等因素。本文首先建立了直升机系统模型,基于 NED 坐标系描述其运动学与动力学特性,并在此基础上引入多项性能约束,包括最小转弯半径、最大爬升/俯冲角、飞行高度以及最大航程,以确保规划轨迹符合真实飞行能力和作业需求。随后,构建了面向森林火灾场景的多威胁环境模型,对地形、火灾及气象因素进行定量建模。
地形威胁通过山体模型与安全代价函数描述;火灾威胁采用热源与烟雾叠加的复合威胁场进行刻画;气象威胁则以不可飞行区域形式加以约束。
3.基于改进RRT*-D*算法的轨迹规划
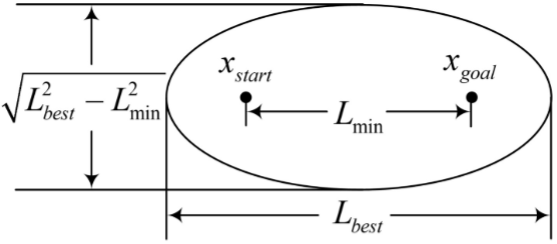
针对森林火灾环境高度动态且不可预测的问题,直升机在执行灭火救援任务时需具备实时评估与调整飞行轨迹的能力,以避免进入高温、浓烟等高风险区域。传统启发式算法在动态环境下轨迹规划能力有限。为此,本文提出一种融合 Informed-RRT* 与 D* Lite 的轨迹规划方法。首先介绍了标准 Informed-RRT* 算法,其在获得首条可行路径后,通过构建以起点和终点为焦点的椭球采样空间,利用启发式信息不断收缩搜索范围并优化路径,从而高效逼近全局最优解。
动态步长策略
传统 Informed-RRT* 算法因采用固定步长,存在节点利用率低的问题:步长过小导致搜索效率下降,步长过大则易引发碰撞并产生冗余路径。为此,本文提出一种动态步长调节策略,根据节点与障碍物之间的距离自适应调整扩展步长。构建节点到障碍物最小距离集合 ϕ d i s \phi_{dis} ϕdis,计算其最大值与最小值:
d max = max ( d ( i ) ) , d min = min ( d ( i ) ) d_{\max}=\max(d(i)),\quad d_{\min}=\min(d(i)) dmax=max(d(i)),dmin=min(d(i))
对距离进行归一化处理:
d ˉ ( i ) = d ( i ) − d min d max − d min \bar{d}(i)=\frac{d(i)-d_{\min}}{d_{\max}-d_{\min}} dˉ(i)=dmax−dmind(i)−dmin
引入基准步长 δ b a s e \delta_{base} δbase与调节系数 λ \lambda λ,得到动态步长:
δ = δ b a s e + λ d ˉ ( i ) \delta=\delta_{base}+\lambda\bar{d}(i) δ=δbase+λdˉ(i)
迭代抽样优化策略
为提升 Informed-RRT* 在动态环境下的收敛效率,本文在节点扩展过程中引入基于初始路径的贪婪筛选策略,最小化综合代价:
S = min ( D + { N } + { A } ) S=\min(D+\{N\}+\{A\}) S=min(D+{N}+{A})
有效剔除对路径优化无贡献的采样节点,从而缩小搜索空间并加快收敛速度。随后,引入D ⋆ ^{\star} ⋆ Lite 算法对环境变化进行高效重规划,通过维护 g ( x ) g(x) g(x)与 r h s ( x ) rhs(x) rhs(x)的一致性关系,并结合优先队列与修正因子 k m k_{m} km,实现对新增或受影响节点的局部更新,避免全局重复搜索。
4.结果展示

5.参考文献
1 Yuan J, Shao Q, Sun J. Helicopter trajectory planning method based on improved IRRT*-D* algorithm in forest fire rescue scenariosJ. Advanced Engineering Informatics, 2026, 69: 103947.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx