fastlio2出了对应的ROS2对应的建图
1.跑通mid360驱动包
可以看我以前的文章教程:https://blog.csdn.net/2301_79618994/article/details/157222625?spm=1001.2014.3001.5501
2.跑通faslio2算法包
在src下面可以git clone
git clone -b ros2 https://github.com/Ericsii/FAST_LIO.git --recursive或者下载了代码可以使用git切换
git clone https://github.com/hku-mars/FAST_LIO.git
cd FAST_LIO
git checkout ros2
git submodule update --init --recursive # 保证依赖也同步如果你直接colcon build 可能会导致编译报错
以下是报错:
core for MP: 3
CMake Warning (dev) at CMakeLists.txt:81 (find_package):
Policy CMP0074 is not set: find_package uses <PackageName>_ROOT variables.
Run "cmake --help-policy CMP0074" for policy details. Use the cmake_policy
command to set the policy and suppress this warning.
CMake variable PCL_ROOT is set to:
/usr
For compatibility, CMake is ignoring the variable.
This warning is for project developers. Use -Wno-dev to suppress it.
Eigen:/usr/include/eigen3
CMake Error at CMakeLists.txt:95 (add_executable):
Cannot find source file:
include/ikd-Tree/ikd_Tree.cpp
Tried extensions .c .C .c++ .cc .cpp .cxx .cu .mpp .m .M .mm .ixx .cppm .h
.hh .h++ .hm .hpp .hxx .in .txx .f .F .for .f77 .f90 .f95 .f03 .hip .ispc
CMake Error at CMakeLists.txt:95 (add_executable):
No SOURCES given to target: fastlio_mapping也就是找不到/ikd-Tree/ikd_Tree.cpp,可能你在看代码的时候,没有这个文件,可以更新模块下载或者单独下载来去放到对应文件夹
git clone https://github.com/hku-mars/ikd-Tree.git3.编译运行
cd /home/af/test2
colcon buildros2 launch fast_lio mapping.launch.py
编译之后就是,打开终端运行
cd /home/af/test2
source install/setup.bash
ros2 launch livox_ros_driver2 msg_MID360_launch.py再打开一个终端
cd /home/af/test2
source install/setup.bash
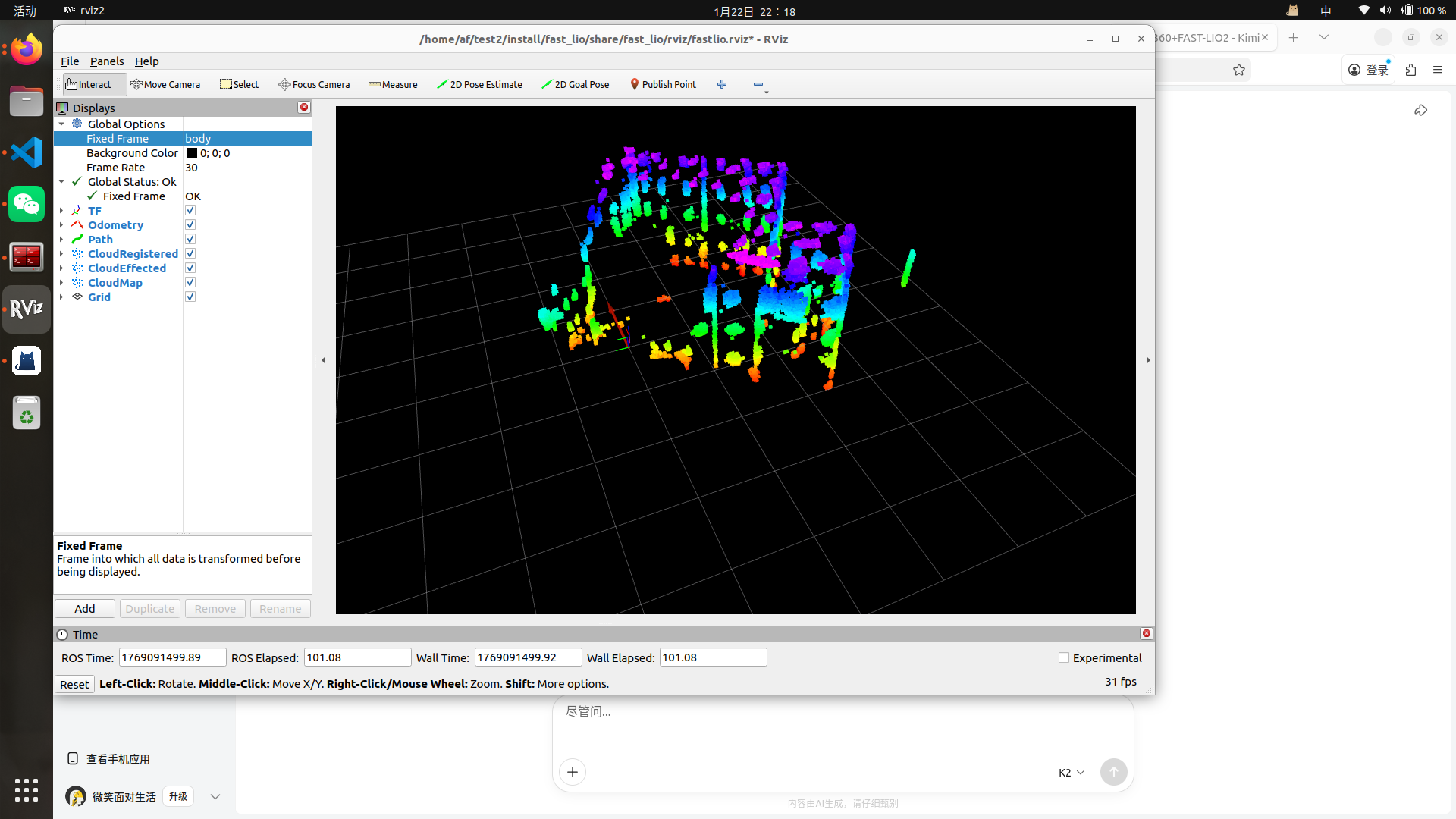
ros2 launch fast_lio mapping.launch.py然后就是完成fastlio2建图了,一开始的rviz黑屏,注意那不是黑屏,你把rviz放大就可以看见了,然后add一个grid,就和之前的一样了