Tenenbaum, J. B., De Silva, V., & Langford, J. C. (2000). A global geometric framework for nonlinear dimensionality reduction. Science, 290(5500), 2319-2323.
今天我们要"考古"一篇发表于 2000 年 Science 杂志 的神级论文------Isomap。
流形学习的鼻祖:它教会我们如何像"蚂蚁"一样在曲面上感知距离,而不是像"苍蝇"一样飞越欧氏空间。这种测地线 (Geodesic) 的思想,是处理点云非刚性形变(Non-rigid Deformation)的基石。
数学的美感:不同于现在神经网络的黑盒,Isomap 的推导(从 Floyd 最短路到 MDS 特征分解)逻辑严密,每一步都有完美的数学解释。
硬核干货:本文不仅讲解 Isomap 算法流程,还特别手推了论文中针对手写数字识别使用的"切空间距离 (Tangent Distance)"------这是一个常被忽略,但能有效解决旋转/缩放不变性的数学利器。
如果你厌倦了调参,想静下心来从数学底层理解"数据流形",那么这篇文章就是为你准备的。让我们一起拆解这篇 Science 经典,看看非线性降维的全局几何框架究竟长什么样。
1. 论文的核心观点:数据是高维的,但本质是低维的
为什么这么说?
科学家经常面临处理大量高维数据的挑战,例如全球气候模式、人类基因分布或图像视频。以一张 64 × 64 64 \times 64 64×64 像素的人脸图像为例,它在数学上是一个 4096 维的向量( 64 2 = 4096 64^2=4096 642=4096)。然而,控制这一张人脸图像变化的物理变量(自由度)其实非常少,比如:上下转头、左右转头、光照方向。
这意味着,虽然数据"居住"在一个 4096 维的观察空间里,但它们实际上只是分布在一个卷曲的、低维的(例如 3 维)流形(Manifold)上。
-
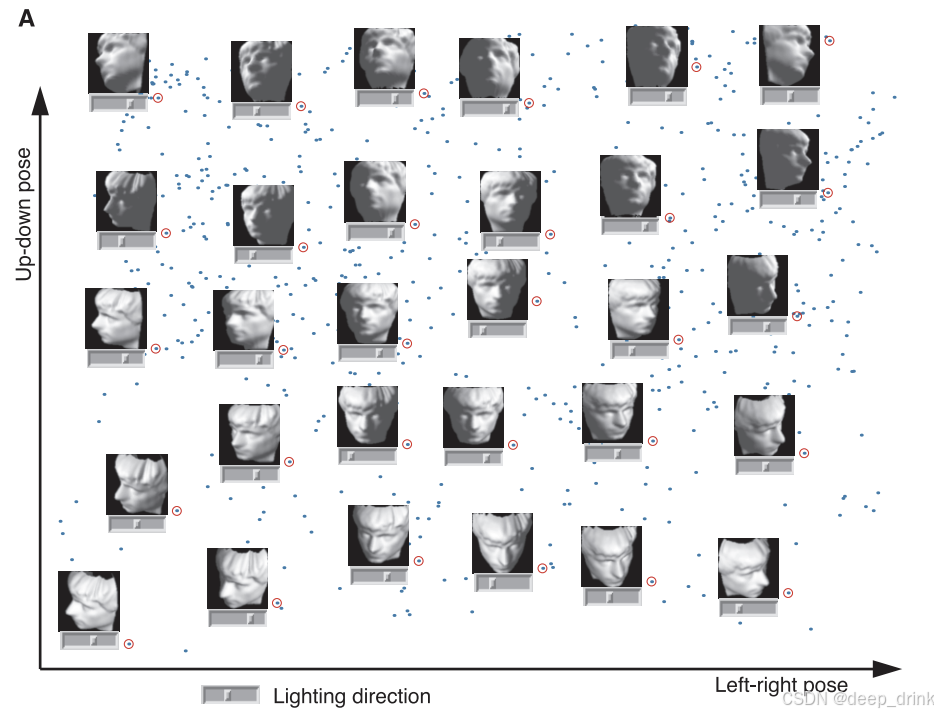
图 1 (A) 人脸数据嵌入 :
Isomap 将 698 张高维人脸图像映射到了 3 维空间。结果显示,这三个坐标轴自动对应了图像的内在自由度:
- X 轴:左右姿态(Left-right pose)
- Y 轴:上下姿态(Up-down pose)
- 滑块轴 :光照方向(Lighting direction)
这证明算法在没有任何监督的情况下,发现了数据的物理生成机制。
-
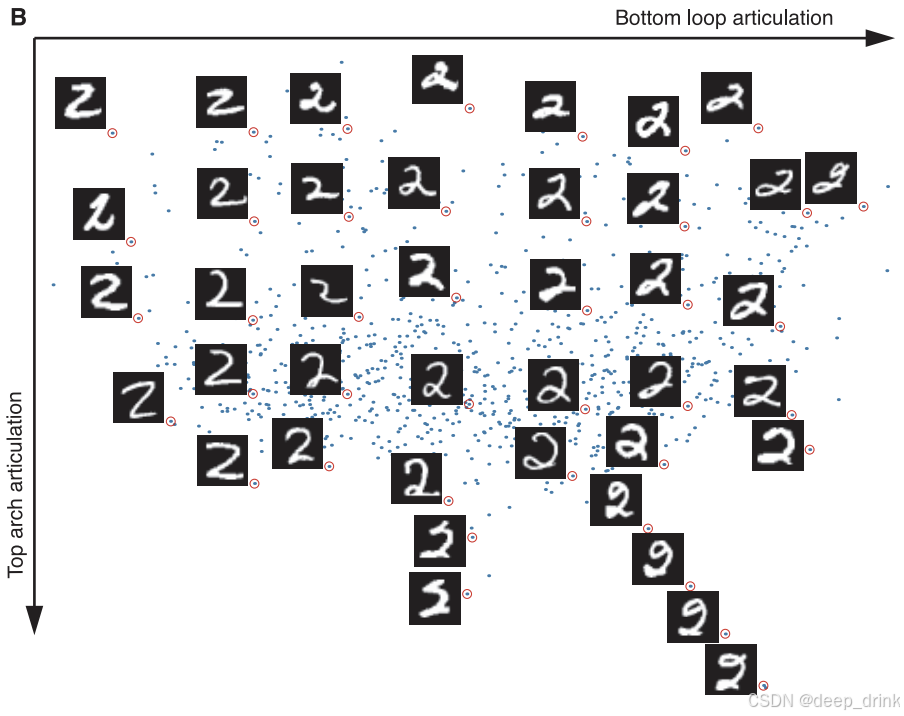
图 1 (B) 手写数字 '2' 的嵌入 :
Isomap 将 1000 个手写数字 "2" 映射到了二维空间。结果显示,这两个坐标轴自动对应了手写风格的内在自由度:
- X 轴:底部圆环的形状(Bottom loop articulation),从左侧带有明显大圆环的写法,过渡到右侧底部为直线的写法。
- Y 轴 :顶部拱形的形状(Top arch articulation),从下侧尖锐的"V"形弯钩,过渡到上侧圆润的拱形弯钩。
图中伸出的"触须"(Tendrils)代表了某些极端的、带有额外装饰笔画的罕见写法。
-
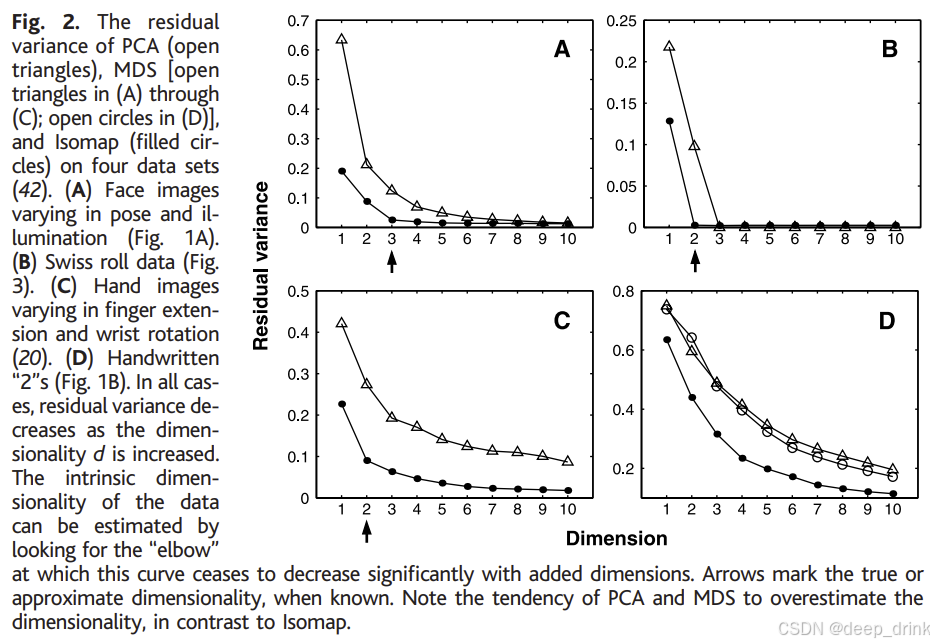
图 2 残差方差(The Elbow Curve) :
这是评估降维效果的关键图表。横轴是维度 d d d,纵轴是残差方差(越低越好)。
- 现象 :Isomap(实心点)的误差曲线在达到真实维度(如瑞士卷 d = 2 d=2 d=2,人脸 d = 3 d=3 d=3)时急剧下降,形成一个明显的"肘部"(Elbow)。
- 对比:传统线性方法 PCA 和 MDS(空心点)无法发现这种非线性结构,往往高估数据的维度,误差下降缓慢。
2. 论文要干什么:构建全局测地线距离
核心目标:把卷曲的流形"铺平"。
传统方法(PCA/MDS)使用的是欧氏距离(Euclidean distance),这相当于在空间中走直线(穿墙术)。对于卷曲的"瑞士卷"结构,这会错误地将流形上相距很远的点(比如卷的两层)判为邻居。
Isomap 的目标是计算流形上的测地线距离(Geodesic distance),即沿着曲面爬行的距离。只有保持了这个距离,才能真正恢复数据的低维几何结构。
3. 论文怎么去做的:Isomap 三部曲
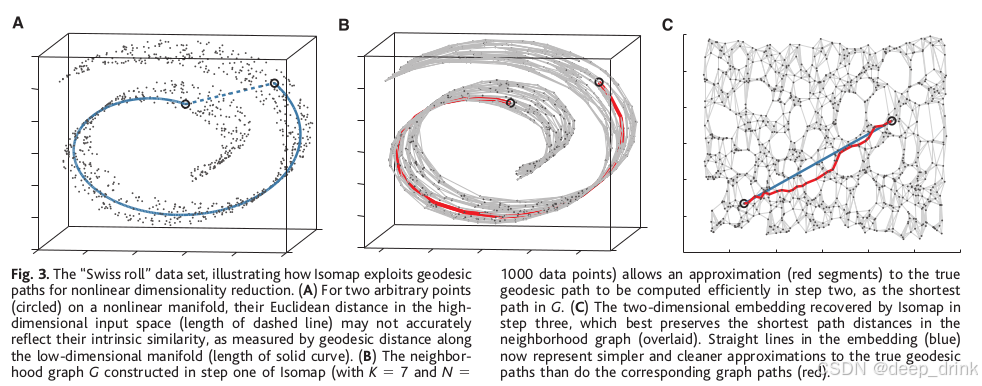
Isomap 的算法流程极其简洁,主要分为三步。结合图 3(瑞士卷展开过程)进行讲解:
Step 1: 构建邻域图 (Construct Neighborhood Graph)
我们需要定义局部的连通性(对应图 3B)。
- 计算所有点对 ( i , j ) (i, j) (i,j) 之间的输入空间距离 d X ( i , j ) d_X(i,j) dX(i,j)。
- 建图规则 :
- K K K-Isomap :连接最近的 K K K 个邻居。
- ϵ \epsilon ϵ-Isomap :连接所有距离小于 ϵ \epsilon ϵ 的点。
- 边权重设为 d X ( i , j ) d_X(i,j) dX(i,j)。
- 特别注意 :对于手写数字数据集,论文使用了切空间距离 (Tangent Distance) 来代替欧氏距离,以消除旋转和变形的影响。
Step 2: 计算最短路径 (Compute Shortest Paths)
这是算法的灵魂。通过局部距离的传递,近似全局测地线距离(对应图 3B 中的红线)。
算法 :使用 Floyd-Warshall 算法 更新距离矩阵 D G D_G DG:
d G ( i , j ) = min { d G ( i , j ) , d G ( i , k ) + d G ( k , j ) } d_G(i,j) = \min \{ d_G(i,j), \quad d_G(i,k) + d_G(k,j) \} dG(i,j)=min{dG(i,j),dG(i,k)+dG(k,j)}
这一步将稀疏的邻接矩阵转化为稠密的全局测地线距离矩阵,其中 D G ( i , j ) D_G(i,j) DG(i,j) 近似于流形上的真实距离 d M ( i , j ) d_M(i,j) dM(i,j)。
Step 2: 计算最短路径 (Compute Shortest Paths)
这一步是 Isomap 的"灵魂"。在 Step 1 中,我们只知道谁和谁是邻居(局部距离);在 Step 2 中,我们要计算任意两点之间的距离。
1. 核心思想:以"图"代"面"
我们假设数据所在的流形是光滑的。对于流形上相距很远的两个点 A 和 B:
- 直线距离(欧氏距离):是错误的,因为它穿过了流形弯曲的空间(像"穿墙术")。
- 测地线距离:是正确的,它是沿着流形表面走的距离。
Isomap 的策略 :利用邻域图(Neighborhood Graph)。如果邻居选得足够密,那么图上的最短路径(Shortest Path on Graph) 就会极其逼近流形上的 测地线距离(Geodesic Distance)。
2. 具体的算法:Floyd-Warshall
原论文采用了 Floyd-Warshall 算法 来计算图中所有节点对之间的最短路径。这是一个基于动态规划(Dynamic Programming)的算法。
解释:要求所有的点之间的距离。先随机一个点,然后看其他经过该点的路径是不是缩短了。
算法流程:
-
初始化距离矩阵 D G D_G DG ( N × N N \times N N×N):
- 如果点 i i i 和点 j j j 是邻居(在 Step 1 中连了边),则 D G ( i , j ) = d X ( i , j ) D_G(i,j) = d_X(i,j) DG(i,j)=dX(i,j)(也就是它俩的欧氏距离或切空间距离)。
- 如果点 i i i 和点 j j j 不是邻居,则 D G ( i , j ) = ∞ D_G(i,j) = \infty DG(i,j)=∞(无穷大)。
- 对角线元素 D G ( i , i ) = 0 D_G(i,i) = 0 DG(i,i)=0。
-
迭代更新 (The Core Loop) :
我们需要遍历每一个点 k k k ( k = 1 ... N k = 1 \dots N k=1...N),把它作为"中转站",看看经过点 k k k 是否能缩短点 i i i 到点 j j j 的距离。
状态转移方程 :
d G ( i , j ) = min { d G ( i , j ) , d G ( i , k ) + d G ( k , j ) } d_G(i,j) = \min \{ d_G(i,j), \quad d_G(i,k) + d_G(k,j) \} dG(i,j)=min{dG(i,j),dG(i,k)+dG(k,j)}
Python 代码实现 (Floyd-Warshall)
python
import numpy as np
def floyd_warshall(dist_matrix):
"""
Args:
dist_matrix: N x N 邻接矩阵 (不相连处为 inf)
Returns:
d: N x N 全局测地线距离矩阵
"""
N = dist_matrix.shape[0]
d = dist_matrix.copy()
# 三层循环:k 为中转点
for k in range(N):
for i in range(N):
for j in range(N):
# 状态转移
if d[i, k] + d[k, j] < d[i, j]:
d[i, j] = d[i, k] + d[k, j]
return d-
复杂度分析
-
时间复杂度: O ( N 3 ) O(N^3) O(N3)。
因为有三层循环( k , i , j k, i, j k,i,j 都要从 1 遍历到 N N N)。
这也是 Isomap 最大的瓶颈。如果数据点有 10,000 个, 10000 3 10000^3 100003 是一个天文数字,计算会非常慢。
-
空间复杂度: O ( N 2 ) O(N^2) O(N2)。
需要存储一个 N × N N \times N N×N 的稠密距离矩阵。
-
Step 3: 构建低维嵌入 (MDS Embedding)
Isomap 的最后一步是使用 经典 MDS (Classical MDS) 将测地线距离矩阵 D G D_G DG 转化为低维坐标 Y = y 1 , y 2 , ... , y N T ∈ R N × d \mathbf{Y} = y_1, y_2, \\dots, y_N^T \in \mathbb{R}^{N \times d} Y=y1,y2,...,yNT∈RN×d(对应图 3C)。
核心问题是:已知点之间的距离(Step 3通过遍历求出来的),如何反求点的坐标?
1. 设定目标与假设
假设我们寻找的低维坐标 y i y_i yi 满足欧氏距离等于测地线距离:
∥ y i − y j ∥ 2 = D G ( i , j ) 2 \|y_i - y_j\|^2 = D_G(i,j)^2 ∥yi−yj∥2=DG(i,j)2
为了得到唯一解,我们必须消除平移不确定性,假设数据的重心在原点 :
∑ i = 1 N y i = 0 \sum_{i=1}^N y_i = \mathbf{0} i=1∑Nyi=0
解释: 这是我们自己设定的,也就是说所有的点去中心化
2. 从距离到内积 (The Law of Cosines)
我们需要将"距离矩阵"转换为"内积矩阵"才能进行特征分解。
展开欧氏距离的平方:
D i j 2 = ∥ y i − y j ∥ 2 = ( y i − y j ) T ( y i − y j ) = y i T y i + y j T y j − 2 y i T y j = ∥ y i ∥ 2 + ∥ y j ∥ 2 − 2 ⟨ y i , y j ⟩ \begin{aligned} D_{ij}^2 &= \|y_i - y_j\|^2 \\ &= (y_i - y_j)^T (y_i - y_j) \\ &= y_i^T y_i + y_j^T y_j - 2 y_i^T y_j \\ &= \|y_i\|^2 + \|y_j\|^2 - 2 \langle y_i, y_j \rangle \end{aligned} Dij2=∥yi−yj∥2=(yi−yj)T(yi−yj)=yiTyi+yjTyj−2yiTyj=∥yi∥2+∥yj∥2−2⟨yi,yj⟩
令内积矩阵 B \mathbf{B} B 的元素为 B i j = ⟨ y i , y j ⟩ = y i T y j B_{ij} = \langle y_i, y_j \rangle = y_i^T y_j Bij=⟨yi,yj⟩=yiTyj。
则上式变为:
D i j 2 = B i i + B j j − 2 B i j (公式 1) D_{ij}^2 = B_{ii} + B_{jj} - 2 B_{ij} \text{(公式 1)} Dij2=Bii+Bjj−2Bij(公式 1)
现在我们遇到了困难: D i j 2 D_{ij}^2 Dij2 是已知的(Step 2 算出来的),但 B i i , B j j , B i j B_{ii}, B_{jj}, B_{ij} Bii,Bjj,Bij 都是未知的。一个方程解三个未知数?
3. 双中心化 (Double Centering)
为了消掉 B i i B_{ii} Bii 和 B j j B_{jj} Bjj,我们利用重心为 0 的性质(即 ∑ B i j = 0 \sum B_{ij} = 0 ∑Bij=0)。我们对距离矩阵进行"行平均"和"列平均"操作。
定义算子:
- 1 N ∑ j = 1 N D i j 2 \frac{1}{N} \sum_{j=1}^N D_{ij}^2 N1∑j=1NDij2 (第 i i i 行的平均)
- 1 N ∑ i = 1 N D i j 2 \frac{1}{N} \sum_{i=1}^N D_{ij}^2 N1∑i=1NDij2 (第 j j j 列的平均)
- 1 N 2 ∑ i = 1 N ∑ j = 1 N D i j 2 \frac{1}{N^2} \sum_{i=1}^N \sum_{j=1}^N D_{ij}^2 N21∑i=1N∑j=1NDij2 (全矩阵平均)
对 (公式 1) 进行复杂的求和与平均运算后(利用 ∑ y i = 0 \sum y_i = 0 ∑yi=0 使得 ∑ B i ⋅ = 0 \sum B_{i \cdot} = 0 ∑Bi⋅=0),我们会神奇地发现:
B i j = − 1 2 ( D i j 2 − 1 N ∑ k D i k 2 − 1 N ∑ k D k j 2 + 1 N 2 ∑ k , l D k l 2 ) (公式 2) B_{ij} = -\frac{1}{2} \left( D_{ij}^2 - \frac{1}{N}\sum_k D_{ik}^2 - \frac{1}{N}\sum_k D_{kj}^2 + \frac{1}{N^2}\sum_{k,l} D_{kl}^2 \right) \text{(公式 2)} Bij=−21 Dij2−N1k∑Dik2−N1k∑Dkj2+N21k,l∑Dkl2 (公式 2)
矩阵形式 (最优雅的表达) :
令 S \mathbf{S} S 为平方距离矩阵 ( S i j = D i j 2 S_{ij} = D_{ij}^2 Sij=Dij2),令 H = I − 1 N 11 T \mathbf{H} = \mathbf{I} - \frac{1}{N}\mathbf{1}\mathbf{1}^T H=I−N111T 为中心化矩阵。上述繁琐的加减运算等价于:
B = − 1 2 H S H (公式 3) \mathbf{B} = -\frac{1}{2} \mathbf{H} \mathbf{S} \mathbf{H} \text{(公式 3)} B=−21HSH(公式 3)
这就是为什么公式里会有 − 1 / 2 -1/2 −1/2 和那个奇怪的矩阵乘法。它的物理意义是:从距离平方中剔除行均值和列均值,剩下的就是纯粹的内积信息。
解释: 由公式2推导公式3不好推,但是由公式3推导公式2很简单
首先,定义一个全 1 的矩阵 J \mathbf{J} J(为了方便书写,用 J \mathbf{J} J 代表那一坨平均算子):
J = 1 N 11 T = ( 1 / N ⋯ 1 / N ⋮ ⋱ ⋮ 1 / N ⋯ 1 / N ) \mathbf{J} = \frac{1}{N}\mathbf{1}\mathbf{1}^T = \begin{pmatrix} 1/N & \cdots & 1/N \\ \vdots & \ddots & \vdots \\ 1/N & \cdots & 1/N \end{pmatrix} J=N111T= 1/N⋮1/N⋯⋱⋯1/N⋮1/N
这个矩阵 J \mathbf{J} J 有个特性:任何矩阵乘以它,就是在算平均值。
J S \mathbf{J}\mathbf{S} JS: J \mathbf{J} J在左求列平均
S J \mathbf{S}\mathbf{J} SJ: J \mathbf{J} J在右求行平均
J S J \mathbf{J}\mathbf{S}\mathbf{J} JSJ:左右都有 J \mathbf{J} J,整个矩阵变为平均值
那么,中心化矩阵 H \mathbf{H} H 就可以写成:
H = I − J \mathbf{H} = \mathbf{I} - \mathbf{J} H=I−J
暴力展开 H S H \mathbf{H}\mathbf{S}\mathbf{H} HSH
现在我们将 H = I − J \mathbf{H} = \mathbf{I} - \mathbf{J} H=I−J 代入 H S H \mathbf{H}\mathbf{S}\mathbf{H} HSH 并进行乘法分配(就像做 ( a − b ) × ( a − b ) (a-b)\times(a-b) (a−b)×(a−b) 一样):
H S H = ( I − J ) S ( I − J ) = ( S − J S ) ( I − J ) <-- 先把左边乘进去 = S − S J − J S + J S J <-- 再把右边乘进去 \begin{aligned} \mathbf{H}\mathbf{S}\mathbf{H} &= (\mathbf{I} - \mathbf{J}) \mathbf{S} (\mathbf{I} - \mathbf{J}) \\ &= (\mathbf{S} - \mathbf{J}\mathbf{S}) (\mathbf{I} - \mathbf{J}) \quad \text{<-- 先把左边乘进去} \\ &= \mathbf{S} - \mathbf{S}\mathbf{J} - \mathbf{J}\mathbf{S} + \mathbf{J}\mathbf{S}\mathbf{J} \quad \text{<-- 再把右边乘进去} \end{aligned} HSH=(I−J)S(I−J)=(S−JS)(I−J)<-- 先把左边乘进去=S−SJ−JS+JSJ<-- 再把右边乘进去
解释: 令 S \mathbf{S} S 为平方距离矩阵 ( S i j = D i j 2 S_{ij} = D_{ij}^2 Sij=Dij2)带入到上面的这个公式就得到公式2了,一般也不用推导,记住公式3能够求内积矩阵就可以了
4. 特征分解求坐标
现在我们有了内积矩阵 B \mathbf{B} B。根据定义 B = Y Y T \mathbf{B} = \mathbf{Y} \mathbf{Y}^T B=YYT。
因为 B \mathbf{B} B 是对称半正定矩阵,我们可以对其进行特征值分解 (Eigendecomposition):
B = V Λ V T \mathbf{B} = \mathbf{V} \mathbf{\Lambda} \mathbf{V}^T B=VΛVT
其中 Λ = diag ( λ 1 , ... , λ N ) \mathbf{\Lambda} = \text{diag}(\lambda_1, \dots, \lambda_N) Λ=diag(λ1,...,λN) 是特征值(从大到小排列), V \mathbf{V} V 是特征向量矩阵。
为了降维到 d d d 维,我们只取前 d d d 个最大的正特征值:
B ≈ V d Λ d V d T = ( V d Λ d 1 / 2 ) ( V d Λ d 1 / 2 ) T \mathbf{B} \approx \mathbf{V}_d \mathbf{\Lambda}_d \mathbf{V}_d^T = (\mathbf{V}_d \mathbf{\Lambda}_d^{1/2}) (\mathbf{V}_d \mathbf{\Lambda}_d^{1/2})^T B≈VdΛdVdT=(VdΛd1/2)(VdΛd1/2)T
对比 B = Y Y T \mathbf{B} = \mathbf{Y} \mathbf{Y}^T B=YYT,我们可以直接读出坐标 Y \mathbf{Y} Y:
Y = V d Λ d 1 / 2 \mathbf{Y} = \mathbf{V}_d \mathbf{\Lambda}_d^{1/2} Y=VdΛd1/2
即第 i i i 个点的第 k k k 维坐标为:
y i k = λ k ⋅ v i k y_{ik} = \sqrt{\lambda_k} \cdot v_{ik} yik=λk ⋅vik
至此,我们成功从距离矩阵 D G D_G DG 还原出了低维坐标 Y \mathbf{Y} Y。
解释: 你想要几维,就取前几个就可以了
4. 补充只是:切空间距离 (Tangent Distance) 的计算细节
在 Isomap 处理手写数字时,为了解决"旋转/缩放不变性"问题,Simard 等人提出了切空间距离。这不只是一个概念,更是一套严密的数学计算流程。以下是 Step-by-Step 的计算指南:
第一步:准备"原材料" (计算图像梯度)
首先,我们要知道图片怎么"动"。图片是由像素组成的矩阵 I I I(例如 MNIST 为 28 × 28 28 \times 28 28×28)。
要让图片动起来(比如平移),我们需要知道每个像素"旁边"是什么颜色。这就叫梯度。
- 输入 :图片矩阵 I I I ( 28 × 28 28 \times 28 28×28)。
- 操作 :算出两个新矩阵:
- 水平梯度图 ( I x I_x Ix) :每个像素和它右边 像素的差值。
直觉:这里记录了竖直边缘(哪里变亮或变暗了)。 - 垂直梯度图 ( I y I_y Iy) :每个像素和它下边 像素的差值。
直觉:这里记录了水平边缘。
- 水平梯度图 ( I x I_x Ix) :每个像素和它右边 像素的差值。
直观例子(假设图片只有一行):
- 像素值:
[10, 10, 100, 10, 10](中间有个亮点) - 梯度 I x I_x Ix:
[0, 90, -90, 0](左边陡升,右边陡降) - 含义*:告诉计算机,如果想把亮点往右移,左边像素要 + 90 +90 +90 (变亮),右边像素要 − 90 -90 −90 (变暗)。
第二步:制造"变形工具包" (生成 7 个切向量)
这是最关键的一步。我们为数字设计了 7 种标准变形,并计算每种变形对应的"变化趋势图"(切向量)。
设定坐标系:图片中心为原点 ( 0 , 0 ) (0,0) (0,0)。
我们需要计算 7 个 28 × 28 28 \times 28 28×28 的矩阵,并将它们拉直为 784 × 1 784 \times 1 784×1 的向量:
| 变形类型 | 切向量公式 | 物理含义解释 |
|---|---|---|
| X轴平移 ( T 1 T_1 T1) | T 1 = I x T_1 = I_x T1=Ix | 直接利用水平梯度。 |
| Y轴平移 ( T 2 T_2 T2) | T 2 = I y T_2 = I_y T2=Iy | 直接利用垂直梯度。 |
| 旋转 ( T 3 T_3 T3) | T 3 = y ⋅ I x − x ⋅ I y T_3 = y \cdot I_x - x \cdot I_y T3=y⋅Ix−x⋅Iy | 角动量公式。描述旋转时的像素变化。 |
| 缩放 ( T 4 T_4 T4) | T 4 = x ⋅ I x + y ⋅ I y T_4 = x \cdot I_x + y \cdot I_y T4=x⋅Ix+y⋅Iy | 放大时,四周像素向外扩散。 |
| 平行挤压 ( T 5 T_5 T5) | T 5 = x ⋅ I x − y ⋅ I y T_5 = x \cdot I_x - y \cdot I_y T5=x⋅Ix−y⋅Iy | 保持面积不变,拉长或压扁。 |
| 对角挤压 ( T 6 T_6 T6) | T 6 = y ⋅ I x + x ⋅ I y T_6 = y \cdot I_x + x \cdot I_y T6=y⋅Ix+x⋅Iy | 沿对角线方向拉伸。 |
| 笔画加粗 ( T 7 T_7 T7) | T 7 = ( I x ) 2 + ( I y ) 2 T_7 = (I_x)^2 + (I_y)^2 T7=(Ix)2+(Iy)2 | 近似公式。边缘梯度大的地方变亮,模拟笔画变粗。 |
做完这一步,对于图片 A,我们得到了一个矩阵 T A \mathbf{T}_A TA ( 784 × 7 784 \times 7 784×7);对于图片 B,得到矩阵 T B \mathbf{T}_B TB ( 784 × 7 784 \times 7 784×7)。
第三步:让它们"对战" (建立最小二乘方程)
现在我们想问:
"如果让 A 变一点点 ( T A ⋅ α \mathbf{T}_A \cdot \alpha TA⋅α),让 B 也变一点点 ( T B ⋅ β \mathbf{T}_B \cdot \beta TB⋅β),它俩能撞上吗?"
数学目标是寻找系数向量 α \alpha α (7维) 和 β \beta β (7维),使得变形后的误差最小:
Loss = ∥ ( Img A + T A ⋅ α ) − ( Img B + T B ⋅ β ) ∥ 2 \text{Loss} = \| (\text{Img}_A + \mathbf{T}_A \cdot \alpha) - (\text{Img}_B + \mathbf{T}_B \cdot \beta) \|_2 Loss=∥(ImgA+TA⋅α)−(ImgB+TB⋅β)∥2
为了让计算机求解,我们将其整理成标准的线性方程组形式 M x = b \mathbf{M}x = b Mx=b:
- 大矩阵 M \mathbf{M} M :将 T A \mathbf{T}_A TA 和 − T B -\mathbf{T}_B −TB 左右拼接。
M = T A , − T B ( 维度 : 784 × 14 ) \mathbf{M} = \\mathbf{T}_A, -\\mathbf{T}_B \quad (\text{维度}: 784 \times 14) M=TA,−TB(维度:784×14) - 目标向量 b b b :两张图片的原始差值。
b = Img B − Img A b = \text{Img}_B - \text{Img}_A b=ImgB−ImgA
第四步:求解与距离计算
直接调用线性代数库(如 numpy.linalg.lstsq)求解 M x = b \mathbf{M}x = b Mx=b。
- 得到最优解 x ∗ x^* x∗ 后,计算残差:
Tangent Distance = ∥ M x ∗ − b ∥ 2 \text{Tangent Distance} = \| \mathbf{M}x^* - b \|_2 Tangent Distance=∥Mx∗−b∥2
结论:这个残差就是 Isomap 使用的最终距离。即便原始像素差很大,只要能通过旋转/缩放对齐,这个距离就会很小,从而正确判定它们是"邻居"。
5. 实验结果:图 4 的流形插值
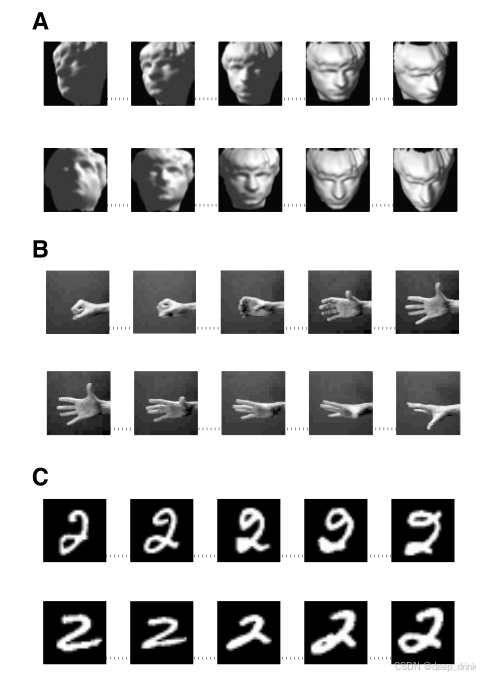
图 4 (Interpolation) 是论文中最直观展示"流形学习成果"的部分。
实验怎么做的?
- Isomap 已经把所有图片映射到了低维空间(比如二维平面)。
- 在低维平面上,任选两个点(代表两个看起来很不一样的数字或人脸)。
- 在两点之间画一条直线。
- 在直线上均匀取点,然后通过最近邻查找 (Nearest Neighbor),找到数据集中对应的高维原始图像。
结果说明了什么?
- 平滑过渡 :观察图 4,你会发现从起点到终点,图像的变化是连续的、符合逻辑的。
- 例如:数字 "2" 的圆圈是逐渐变小 直到消失的;人脸是慢慢转过去的。
- 对比线性方法:如果在像素空间直接做线性插值(Linear Interpolation),你会看到两张图重叠在一起的"鬼影" (Ghosting)。
- 结论 :这证明了 Isomap 展开的低维空间是凸的 (Convex) 且 连续的。算法成功学会了数据的内在生成流形,这里的"直线"真正对应了物理意义上的"渐变"。
6. 讨论与评价
Isomap 的历史地位
它是第一个计算效率高、且具有全局最优保证的非线性降维算法。它不需要像神经网络那样调参、防过拟合,它的结果是确定性的。
优点:
- 捕捉非线性:能处理瑞士卷、莫比乌斯带等复杂结构。
- 全局最优:基于特征值分解,一定能找到全局最优解。
- 极简美学:只有三个步骤,逻辑清晰。
缺点:
- 计算瓶颈 :Step 2 的最短路径计算复杂度是 O ( N 3 ) O(N^3) O(N3),这在 2000 年限制了数据规模(几千个点),虽然现在有 L-Isomap 等加速版本,但对百万级数据仍显吃力。
- 短路效应 (Short-circuiting):这是基于图论方法的通病。如果噪音导致流形上本来很远的两层被错误地连了一根边,整个流形结构会瞬间崩塌。
- 拓扑限制:MDS 强行把流形铺在欧氏空间上。如果流形本身是闭合的(比如一个球体),硬把它撕开铺平会造成极大的扭曲。
总结
Isomap 是一次几何学与统计学习的完美结合。它提醒我们,在处理高维数据时,不要被表象迷惑,要学会寻找那个卷曲的、低维的、真实的"流形"。
💬 互动话题 :
Isomap 的"测地线"思想在现在的图神经网络 (GNN) 或 3D 视觉中是否还有影子?欢迎在评论区讨论!
📚 附录:点云网络系列导航
🔥 欢迎订阅专栏 :【流形研读:经典与前沿论文精讲】持续更新中...
本文为 CSDN 专栏【流形研读:经典与前沿论文精讲】原创内容,转载请注明出处。。