光线查询阴影(不透明几何体)
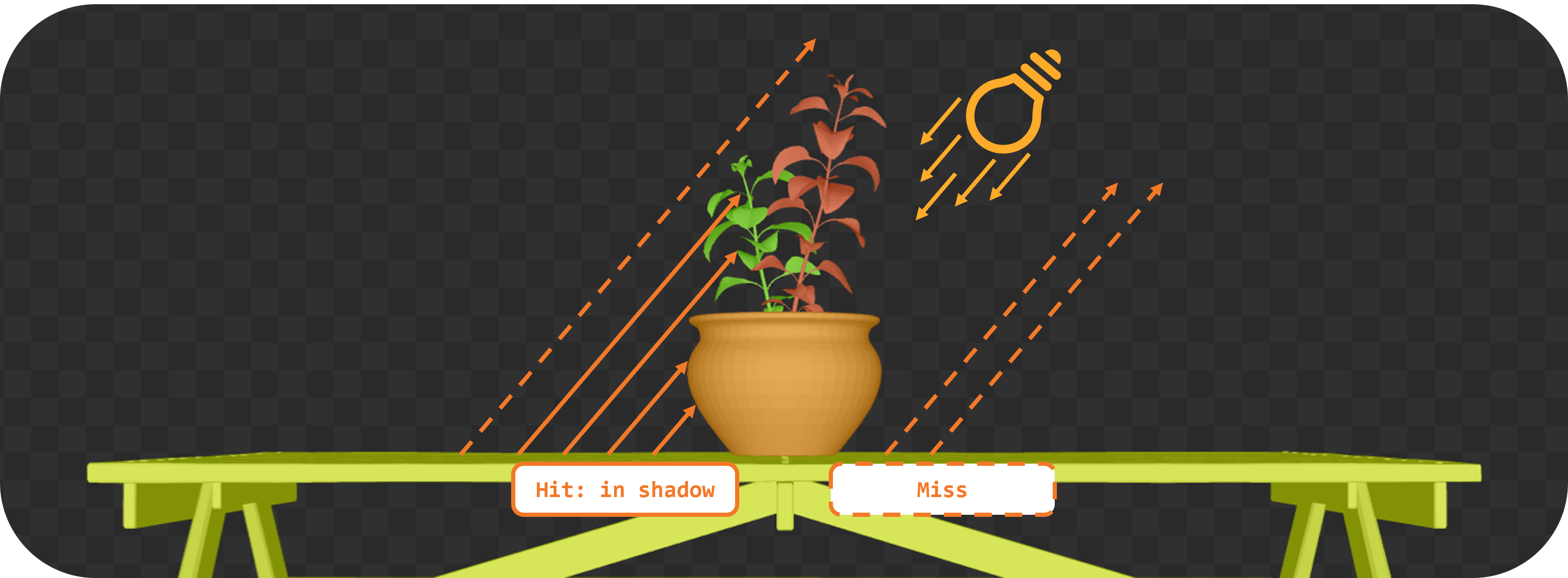
目标:在片段着色器中通过光线查询(Ray Query)实现简单的阴影检测。我们将从每个片段的位置向光源投射一条光线,若光线在到达光源前命中任何几何体,则将该片段调暗(实现硬阴影效果)。
恭喜你:你已经为场景创建了有效的顶层 / 底层加速结构(TLAS/BLAS)!现在,让我们利用这些结构来投射光线。
任务 5:实现基于光线查询的阴影效果
在片段着色器中,我们将通过光线查询从片段位置向光源投射一条阴影射线(shadow ray)。如果射线在到达光源前命中任何几何体,我们就将该片段的颜色调暗:
glsl
// TASK05: 实现基于光线查询的阴影效果
bool in_shadow(float3 P)
{
bool hit = false;
return hit;
}
[shader("fragment")]
float4 fragMain(VSOutput vertIn) : SV_TARGET {
float4 baseColor = textures[pc.materialIndex].Sample(textureSampler, vertIn.fragTexCoord);
float3 P = vertIn.worldPos;
bool inShadow = in_shadow(P);
// 若处于阴影中则调暗颜色
if (inShadow) {
baseColor.rgb *= 0.2;
}
return baseColor;
}要实现这一功能,你需要编写一个辅助函数 in_shadow() 来执行光线查询。首先定义一个射线描述结构体,并使用片段位置和光源方向对其进行初始化:
glsl
bool in_shadow(float3 P)
{
// 构建从世界空间位置指向光源的阴影射线
RayDesc shadowRayDesc;
shadowRayDesc.Origin = P;
shadowRayDesc.Direction = normalize(lightDir);
shadowRayDesc.TMin = EPSILON;
shadowRayDesc.TMax = 1e4;TMin 和 TMax 定义了射线从原点出发的最小 / 最大传播距离。EPSILON 是一个极小值,用于避免自相交(self-intersection) 问题;1e4 是一个足够大的值,确保射线能命中远处的物体。
接下来,初始化一个 RayQuery 对象,用于执行光线遍历。注意我们选择的标志位(flags)是为了提升查询效率:
RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES:因为本场景仅包含三角形几何体,无需处理过程化图元。RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH:一旦找到第一个不透明几何体的相交点就终止遍历 ------ 这对于阴影检测已经足够,因为我们只需要判断是否有物体遮挡光线。
glsl
// 初始化用于阴影检测的光线查询对象
RayQuery<RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES |
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH> sq;
let rayFlags = RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES |
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH;随后启动光线追踪操作,将射线描述、RayQuery 对象和加速结构关联起来:
glsl
sq.TraceRayInline(accelerationStructure, rayFlags, 0xFF, shadowRayDesc);
sq.Proceed();Proceed() 函数会将 RayQuery 对象的状态推进到射线传播路径上的下一个相交 "候选点"。每次调用 Proceed() 都会检查是否存在待处理的相交点:若存在,则更新查询的内部状态,让你可以访问当前候选相交点的信息。这一机制允许你自定义相交处理逻辑(例如跳过透明表面 ------ 我们会在后续实验中实现这一功能),或在命中第一个不透明物体时立即停止。该函数通常在循环中调用以遍历所有潜在相交点,但对于阴影检测,我们只需要第一个相交点:
glsl
// 若阴影射线命中不透明三角形,则判定该像素处于阴影中
bool hit = (sq.CommittedStatus() == COMMITTED_TRIANGLE_HIT);
return hit;
}完成!你已经通过光线查询实现了基础的阴影检测。如果射线在到达光源前命中任何几何体,in_shadow() 函数会返回 true,表示该片段处于阴影中。
修改宏定义并重新编译运行程序:
cpp
#define LAB_TASK_LEVEL 5你会发现一个问题:
GIF 太大可以可以看这里
物体在旋转,但阴影却保持静止。这是因为我们尚未根据物体的动画更新 TLAS------ 每当物体移动或动画播放时,都需要重新构建 TLAS。接下来,我们就来实现这一功能。