一、I2C 通信深度解析与优化实践
I2C 是由飞利浦半导体(现 NXP)开发的两线制串行通信协议,仅需 SDA(Serial Data,数据线)和 SCL(Serial Clock,时钟线)两根线即可实现多主从设备间的双向通信,配合上拉电阻(通常 4.7KΩ~10KΩ)即可完成硬件搭建,在传感器、EEPROM、LCD 显示屏等外设中应用极为广泛。
(一)I2C 协议核心特性与硬件基础
1. 核心特性
- 多主从架构:总线可同时连接多个主设备和从设备,通过设备地址区分不同从设备(7 位地址最常用,支持 128 个不同从设备);
- 双向通信:SDA 线既可以传输主设备到从设备的指令 / 数据,也可以传输从设备到主设备的响应 / 数据;
- 同步时钟:主设备生成 SCL 时钟信号,从设备根据 SCL 的高低电平变化同步传输数据,确保通信时序一致性;
- 应答机制:每传输 1 字节数据后,接收方需返回 ACK(应答)或 NACK(非应答)信号,主设备通过检测应答信号判断数据传输是否成功,提升通信可靠性。
2. 硬件连接注意事项
- 上拉电阻选择:SDA 和 SCL 线需分别串联一个上拉电阻到 VCC(通常 3.3V 或 5V,需与设备电平匹配),电阻值需根据总线长度和通信速率调整 ------ 短距离(<1m)、低速(100Kbps)场景可选 10KΩ,中长距离(1~10m)、高速(400Kbps)场景建议选 4.7KΩ;
- 电平匹配:若主设备与从设备供电电压不同(如 3.3V 主设备与 5V 从设备),需通过电平转换芯片(如 TXB0108)实现 SDA/SCL 线的电平匹配,避免器件损坏;
- 总线负载:I2C 总线的最大负载电容为 400pF,若总线上连接的设备过多,需通过 I2C 中继器扩展负载能力。
(二)I2C 读时序深度拆解(含关键时序参数)
I2C 的读时序是数据采集的核心流程,需严格遵循协议规范的时序参数,否则会导致通信失败。以下是完整读时序步骤 及关键时序参数说明(基于标准模式 100Kbps):
1. 读时序完整步骤
-
起始条件(S):
- 时序要求:SDA 线在 SCL 线为高电平时,从高电平拉低到低电平,随后 SCL 线拉低,完成起始信号;
- 关键参数:SDA 线拉低前的高电平保持时间(t_SU;STA)≥4.7μs,SDA 线拉低后 SCL 线拉低的时间(t_HD;STA)≥4μs;
- 作用:告知所有从设备,I2C 总线即将开始通信,从设备需准备接收地址信息。
-
发送从设备地址 + 读命令:
- 时序要求:SCL 线为高电平时,SDA 线保持稳定(传输 1 位数据),SCL 线低电平时 SDA 线可切换状态;
- 数据格式:7 位从设备地址 + 1 位读 / 写命令(1 表示读,0 表示写),共 8 位;
- 关键参数:SCL 高电平持续时间(t_HIGH)≥4.0μs,SCL 低电平持续时间(t_LOW)≥4.7μs,数据建立时间(t_SU;DAT)≥250ns,数据保持时间(t_HD;DAT)≥0ns;
- 作用:指定通信的从设备,并告知从设备本次通信方向为 "读"。
-
从设备应答(ACK):
- 时序要求:第 8 位数据传输完成后,SCL 线再次拉高,此时从设备拉低 SDA 线,为主设备返回 ACK 信号;
- 关键参数:ACK 信号持续时间需覆盖 SCL 高电平周期,ACK 建立时间(t_SU;ACK)≥250ns,ACK 保持时间(t_HD;ACK)≥0ns;
- 作用:从设备告知主设备 "已成功接收地址,准备发送数据"。
-
接收数据(主设备接收,从设备发送):
- 时序要求:主设备释放 SDA 线控制权(由上拉电阻拉为高电平),从设备通过 SDA 线逐位发送数据,每传输 1 字节后需等待主设备的 ACK 信号;
- 数据长度:可根据需求传输 1 字节或多字节,多字节传输时需重复 "数据 + ACK" 流程;
- 作用:从设备将存储在指定寄存器中的数据发送给主设备。
-
主设备非应答(NACK)+ 停止条件(P):
- 时序要求:当所有数据接收完成后,主设备在 SCL 高电平期间不拉低 SDA 线(即发送 NACK 信号),随后在 SCL 高电平期间将 SDA 线从低电平拉高,产生停止信号;
- 关键参数:NACK 信号需保持到 SCL 高电平结束,停止条件的 SDA 拉高时间(t_SU;STO)≥4.0μs;
- 作用:主设备告知从设备 "数据已接收完成,停止发送",并结束本次通信。
2. 时序异常排查要点
- 若主设备未检测到 ACK 信号,可能原因:从设备地址错误、从设备未上电、总线短路 / 断路、时序参数不满足要求;
- 若数据传输错误,需重点检查 SCL 高低电平持续时间、数据建立 / 保持时间,确保符合协议规范。
(三)多字节寄存器地址兼容优化(深度解析)
不同 I2C 设备的寄存器地址长度存在差异(1 字节、2 字节甚至 3 字节,如部分 EEPROM 的寄存器地址为 2 字节),传统固定长度的地址发送逻辑(如仅支持 1 字节地址)会导致设备适配困难。以下是优化后的通用化多字节地址发送方案,结合代码细节与逻辑解析:
// 发送要读取的内存地址(兼容多字节寄存器地址)
// 参数说明:base-I2C控制器基地址,reg_addr-寄存器地址,reg_len-寄存器地址长度(1/2/3字节)
int i2c_send_reg_addr(I2C_Type *base, uint32_t reg_addr, uint8_t reg_len)
{
int i = reg_len - 1;
int status = 0;
for (; i >= 0; i--)
{
// 提取地址的第i个字节(从高位到低位发送)
base->I2DR = (reg_addr >> (8 * i)) & 0XFF;
// 等待I2C传输完成(检测IIF中断标志位)
status = i2c_wait_iif(base);
if (status != 0)
{
printf("I2C send register address byte %d failed!\n", i);
goto stop; // 传输失败,跳转到停止条件处理
}
}
stop:
return status;
}优化逻辑深度解析
-
地址字节提取 :通过右移运算(
reg_addr >> (8 * i))和掩码运算(& 0XFF),从寄存器地址中依次提取每个字节的有效数据。例如:- 若 reg_addr=0x1234(2 字节地址),reg_len=2,则 i=1 时提取 0x12(
0x1234 >> 8 = 0x12),i=0 时提取 0x34(0x1234 >> 0 = 0x34); - 发送顺序为 "高位字节先发送",符合多数 I2C 设备的寄存器地址接收规范。
- 若 reg_addr=0x1234(2 字节地址),reg_len=2,则 i=1 时提取 0x12(
-
传输状态检测 :
i2c_wait_iif函数用于等待 I2C 传输完成,其核心是检测 I2C 控制器的 IIF(Interrupt In Flag)中断标志位:// 等待I2C传输完成 static int i2c_wait_iif(I2C_Type *base) { uint32_t timeout = 0xFFFF; // 等待IIF置1(传输完成)或超时 while((base->I2SR & (1 << 1)) == 0 && timeout--); if (timeout == 0) { // 超时,返回错误码 return -1; } // 清除IIF标志位(写1清除) base->I2SR |= (1 << 1); return 0; }该函数通过超时机制避免死等,确保系统稳定性,同时清除中断标志位为下一次传输做准备。
-
兼容性设计 :通过
reg_len参数动态适配不同地址长度的设备,无需修改核心逻辑,仅需在调用时指定地址长度即可。例如:- LM75 温度传感器(1 字节寄存器地址):
i2c_send_reg_addr(I2C1, 0x00, 1); - 24C64 EEPROM(2 字节寄存器地址):
i2c_send_reg_addr(I2C1, 0x1234, 2)。
- LM75 温度传感器(1 字节寄存器地址):
(四)LM75 温度传感器完整实现与数据解析(含异常处理)
LM75 是一款由 NXP 推出的高精度数字温度传感器,采用 I2C 接口通信,具有测量范围宽(-55℃~+125℃)、精度高(-10℃~+85℃范围内误差 ±0.5℃)、功耗低(典型值 20μA)等优点,适用于环境温度监测、设备温控等场景。以下是完整实现代码,包含异常处理与数据解析细节:
#include "lm75.h"
#include "i2c.h"
#include "stdio.h"
// LM75配置参数
#define LM75_DEV_ADDR 0x48 // 默认从设备地址(7位,二进制01001000)
#define LM75_TEMP_REG 0x00 // 温度数据寄存器地址(1字节)
#define LM75_CONF_REG 0x01 // 配置寄存器地址(1字节)
#define LM75_THYST_REG 0x02 // 滞后温度寄存器地址(1字节)
#define LM75_TOS_REG 0x03 // 过温阈值寄存器地址(1字节)
/**
* @brief LM75初始化(配置工作模式)
* @retval 0-初始化成功,-1-初始化失败
*/
int lm75_init(void)
{
unsigned char conf_data = 0x00; // 配置为正常工作模式(默认值)
struct I2C_Msg msg = {
.dev_addr = LM75_DEV_ADDR,
.reg_addr = LM75_CONF_REG,
.reg_len = 1,
.dir = I2C_Write,
.data = &conf_data,
.len = 1
};
// 发送配置数据到LM75的配置寄存器
if (transfer(I2C1, &msg) != 0)
{
printf("LM75 init failed!\n");
return -1;
}
printf("LM75 init success!\n");
return 0;
}
/**
* @brief 读取LM75温度数据
* @retval 实际温度值(单位:℃),返回-255表示读取失败
*/
float get_lm75_temp(void)
{
unsigned char read_buff[2] = {0}; // 温度数据为2字节
struct I2C_Msg msg = {
.dev_addr = LM75_DEV_ADDR,
.reg_addr = LM75_TEMP_REG,
.reg_len = 1,
.dir = I2C_Read,
.data = read_buff,
.len = 2
};
printf("Start reading LM75 temperature...\n");
// 执行I2C读操作(严格遵循读时序)
if (transfer(I2C1, &msg) != 0)
{
printf("LM75 temperature read failed!\n");
return -255.0f; // 返回异常值表示读取失败
}
// 温度数据解析(重点!LM75数据格式说明)
// LM75输出16位数据,格式为:D15 D14 ... D7 D6 ... D0
// 其中D15为符号位(0-正温度,1-负温度),D14~D7为整数部分,D6~D0为小数部分
// 温度分辨率为0.5℃,即最小量化单位为0.5℃
unsigned short temp_raw = (read_buff[0] << 8) | read_buff[1];
float temp = 0.0f;
// 正温度处理(D15=0)
if ((temp_raw & 0x8000) == 0)
{
temp_raw = temp_raw >> 7; // 提取高9位(D15~D7),对应量化值
temp = temp_raw * 0.5f; // 量化值×0.5℃得到实际温度
}
// 负温度处理(D15=1,采用二进制补码表示)
else
{
temp_raw = (~temp_raw + 1) >> 7; // 补码转原码,提取有效位
temp = - (temp_raw * 0.5f); // 加上负号
}
printf("LM75 raw data: 0x%04X, calculated temperature: %.1f℃\n", temp_raw, temp);
return temp;
}关键细节解析
- LM75 寄存器配置:LM75 的配置寄存器(0x01)可配置工作模式(正常模式 / 关断模式)、故障队列长度等,本文配置为默认正常模式(持续测温);
- 数据格式解析:LM75 的 16 位温度数据采用 "符号位 + 整数部分 + 小数部分" 的结构,分辨率为 0.5℃,负温度采用二进制补码表示,需通过补码转原码的方式计算实际温度,避免负温度值计算错误;
- 异常处理:添加 I2C 传输结果判断,若传输失败返回 - 255.0f 作为异常标识,便于上层应用处理故障(如重新初始化传感器、提示用户等)。
(五)FPU 使能配置与浮点运算优化
温度数据计算(如 LM75 的 0.5 倍换算)、ADC 电压换算等场景需要用到浮点运算,嵌入式处理器默认可能禁用 FPU(浮点运算单元),此时浮点运算需通过软件模拟实现,效率极低(耗时是硬件 FPU 的数十倍甚至上百倍)。以下是基于 ARM Cortex-A7 架构(IMX6ULL 处理器核心)的 FPU 使能配置,及浮点运算优化说明:
/**
* @brief 使能FPU(浮点运算单元)
* @note 适用于ARM Cortex-A7架构,支持单精度/双精度浮点运算
*/
enable_fpu:
// 1. 配置CPACR寄存器(协处理器访问控制寄存器),开放FPU访问权限
// CPACR寄存器地址:0xE000ED88,c1=coproc1,c0=opcode2,2=CRm
mrc p15, 0, r0, c1, c0, 2 // 读取CPACR寄存器值到r0
orr r0, r0, #(0xF << 20) // 配置CP10和CP11为完全访问模式(0xF=1111)
// CP10对应单精度FPU,CP11对应双精度FPU
mcr p15, 0, r0, c1, c0, 2 // 将配置写回CPACR寄存器,使配置生效
isb // 指令同步屏障,确保配置立即生效
// 2. 使能FPU核心功能(设置FPEXC寄存器的EN位)
// FPEXC寄存器(FPU异常控制寄存器):bit30为EN位,置1表示使能FPU
mov r0, #0x40000000 // r0 = 0x40000000(仅bit30为1)
vmsr fpexc, r0 // 将r0的值写入FPEXC寄存器,使能FPU
// 3. 初始化FPSCR寄存器(FPU状态控制寄存器),清除标志位
// FPSCR寄存器包含浮点运算的状态标志(如溢出、进位、零标志)和控制位
mov r0, #0x00000000 // 清除所有标志位和控制位,使用默认配置
vmsr fpscr, r0 // 写回FPSCR寄存器
bx lr // 函数返回,回到调用处FPU 优化效果验证
- 软件模拟浮点运算:以
temp = temp_raw * 0.5f为例,软件模拟需通过多次移位、加法运算实现,耗时约数十个 CPU 周期; - 硬件 FPU 运算:启用 FPU 后,处理器直接执行
vmul.f32浮点乘法指令,仅需 1~2 个 CPU 周期即可完成,运算效率提升显著; - 验证方法:在代码中添加计时逻辑,分别测量启用 / 禁用 FPU 时的浮点运算耗时,对比优化效果。
二、ADC 模数转换技术全景解析与实战实现
ADC(Analog-to-Digital Converter)是嵌入式系统中连接模拟世界与数字世界的核心模块,其作用是将传感器输出的连续模拟电压信号(如光敏传感器的 0~3.3V 电压、温度传感器的 1~5V 电压)转换为离散的数字信号,以便微处理器进行存储、运算和分析。ADC 的性能直接决定了传感器数据采集的精度和可靠性,是嵌入式系统中 "感知层" 的关键部件。
(一)ADC 核心概念深度解答(含原理细节)
1. 什么是 ADC?
ADC 全称 Analog-to-Digital Converter,即模拟到数字转换器,是一种电子模块或芯片,核心功能是将连续变化的模拟信号(通常为电压信号)转换为离散的二进制数字信号。
- 模拟信号的特点:连续变化、无明确边界,如温度从 25℃缓慢上升到 26℃,期间会经过无数个中间值;
- 数字信号的特点:离散、量化,仅能表示有限个固定值,如 12 位 ADC 只能表示 0~4095 共 4096 个数字量;
- 核心价值:解决数字系统(微处理器、MCU)无法直接处理模拟信号的问题,搭建 "物理世界→传感器→ADC→数字系统" 的信号传输链路。
2. 什么是 ADC 的基准电压?
ADC 的基准电压(Reference Voltage,记为 V_REF + 或 V_REF)是 ADC 进行 "量化对比" 的标准参考电压,是决定 ADC 转换精度的核心参数之一,相当于 ADC 的 "标尺"。
- 作用原理:ADC 的转换过程本质是 "将输入模拟电压(V_IN)与基准电压(V_REF)进行比例对比,然后将比例关系转换为数字量"。例如,若 V_REF=3.3V,V_IN=1.65V,则 V_IN 是 V_REF 的 1/2,对应的数字量也为最大量化值的 1/2;
- 性能要求:基准电压需满足 "高精度" 和 "高稳定性"------ 精度要求基准电压的误差≤ADC 误差的 1/3(如 12 位 ADC 的误差约为 ±1LSB,即 ±0.8mV@3.3V,基准电压误差需≤0.3mV);稳定性要求基准电压受温度、电源波动的影响极小,通常需采用专用基准电压芯片(如 REF3033,输出 3.3V,温度系数 ±10ppm/℃);
- 常见配置:ADC 的基准电压有两种配置方式 ------ 内部基准(ADC 芯片内置,精度较低)和外部基准(通过引脚输入外部高精度基准电压,精度更高),本文中 IMX6ULL 的 ADC 采用外部基准(ADC_VREFH 引脚输入 3.3V)。
3. ADC 的工作原理是什么?(以逐次逼近型为例)
ADC 的核心工作原理是量化 与编码 ,不同类型 ADC 的实现方式不同(如逐次逼近型、积分型、Σ-Δ 型、流水线型),其中逐次逼近型 ADC因兼顾速度与精度,是嵌入式系统中最常用的类型(如 IMX6ULL 内置 ADC、STM32 内置 ADC 均为逐次逼近型)。以下是逐次逼近型 ADC 的详细工作原理:
-
采样与保持(Sample & Hold):
- 功能:通过采样开关获取输入模拟电压(V_IN),并将其存储在采样保持电容(C_HOLD)中;
- 关键:采样阶段开关闭合,电容快速充电至 V_IN;保持阶段开关断开,电容通过高阻抗电路维持电压稳定,确保后续量化过程中电压不变;
- 采样频率:ADC 的采样频率(f_s)需满足奈奎斯特采样定理(f_s ≥ 2f_max,其中 f_max 是输入模拟信号的最高频率),否则会出现混叠失真。例如,采集频率为 100Hz 的信号,采样频率需≥200Hz。
-
逐次逼近寄存器(SAR)初始化:
- SAR 是逐次逼近型 ADC 的核心控制单元,用于存储中间量化结果;
- 初始化时,SAR 的最高位(MSB)置 1,其余位清 0。例如,12 位 ADC 的 SAR 初始值为 0x800(二进制 1000 0000 0000)。
-
数模转换(DAC)与比较:
- SAR 将当前值发送给内置 DAC,DAC 将数字量转换为对应的模拟电压(V_DAC);
- 比较器将 V_DAC 与采样保持电容存储的 V_IN 进行比较:
- 若 V_DAC < V_IN:说明当前 SAR 的值偏小,保留最高位的 1;
- 若 V_DAC > V_IN:说明当前 SAR 的值偏大,将最高位清 0;
- 例如,12 位 ADC 初始 V_DAC=3.3V/2=1.65V,若 V_IN=2.0V(V_DAC < V_IN),则保留最高位 1,SAR 值仍为 0x800。
-
逐位逼近(从高位到低位):
- 依次对次高位、次低位... 最低位(LSB)重复步骤 3 的操作,每次仅调整 1 位;
- 12 位 ADC 需进行 12 次逼近操作,8 位 ADC 需 8 次;
- 例如,12 位 ADC 第 2 次逼近时,将第 10 位置 1(SAR 值为 0xC00),DAC 输出 V_DAC=3.3V×3/4=2.475V,若 V_IN=2.0V(V_DAC > V_IN),则将第 10 位清 0,SAR 值变为 0x800,以此类推。
-
编码与输出:
- 所有位逼近完成后,SAR 中的值即为 V_IN 对应的量化结果;
- ADC 将该量化结果存储在数据寄存器(ADCx_R0)中,并置位转换完成标志位(COCO0),告知处理器 "转换完成,可读取数据"。
4. 什么是 ADC 的分辨率?常见的分辨率有哪些?
ADC 的分辨率是指 ADC 能够区分的最小模拟电压变化量 ,是衡量 ADC 转换精度的核心指标,通常以位数(bit) 表示。
- 数学定义:分辨率为 n 位的 ADC,可将基准电压(V_REF)范围内的模拟信号划分为 2ⁿ个等间隔的量化区间,每个区间对应一个唯一的数字量(0~2ⁿ-1),最小分辨电压(ΔV)= V_REF / (2ⁿ - 1)(理想情况);
- 物理意义:分辨率越高,量化区间越密集,ADC 能够捕捉到的模拟信号变化越细微,转换精度越高;
- 常见分辨率及性能对比(以 V_REF=3.3V 为例):
| 分辨率 | 量化区间数 | 最小分辨电压(ΔV) | 典型应用场景 |
|---|---|---|---|
| 8 位 | 256 | ≈12.9mV | 低精度场景(如简单光线检测、电池电压粗略监测) |
| 10 位 | 1024 | ≈3.22mV | 中精度场景(如普通温度采集、压力传感器) |
| 12 位 | 4096 | ≈0.806mV | 高精度场景(如工业检测、医疗设备、智能硬件) |
| 14 位 | 16384 | ≈0.201mV | 超高精度场景(如精密仪器、科学实验) |
| 16 位 | 65536 | ≈0.050mV | 顶尖精度场景(如航空航天、高端工业控制) |
- 注意:分辨率是 "理论精度",实际转换精度还受基准电压精度、噪声、非线性误差等因素影响。
5. 12 位分辨率 + 3.3V 基准电压,量化结果为 n 时的实际电压计算(含误差分析)
对于 12 位 ADC,量化结果 n 的范围为 0~4095(共 4096 个值),基准电压 V_REF=3.3V,实际输入电压 V_IN 的计算公式需结合 ADC 的量化方式(舍入量化或截断量化):
(1)舍入量化(多数 ADC 采用,如 IMX6ULL ADC)
舍入量化是指 "将输入电压落在某个量化区间内时,取该区间的中间值对应的数字量",计算公式为:VIN=212n×VREF=4096n×3.3
-
公式推导:
- 12 位 ADC 的量化区间为:0, 3.3/4096)、\[3.3/4096, 2×3.3/4096)、...、\[(4095-1)×3.3/4096, 3.3;
- 每个量化区间的中间值为 n×3.3/4096(n 为区间序号,0~4095);
- 舍入量化的最大误差为 ±ΔV/2 = ±0.403mV(ΔV=3.3/4096≈0.806mV),属于可接受范围。
-
示例:
- 若 n=0:V_IN=0×3.3/4096=0V(对应区间 [0, 0.806mV));
- 若 n=2048:V_IN=2048×3.3/4096=1.65V(对应区间 [1.6496V, 1.6504V));
- 若 n=4095:V_IN=4095×3.3/4096≈3.2992V(对应区间 3.2984V, 3.3V)。
(2)截断量化(部分低端 ADC 采用)
截断量化是指 "将输入电压落在某个量化区间内时,取该区间的最小值对应的数字量",计算公式为:VIN=212−1n×VREF=4095n×3.3
- 最大误差为 ΔV≈0.806mV,大于舍入量化,因此舍入量化更常用。
(3)实际应用中的校准
若对精度要求极高,可通过实测校准的方式修正误差:
- 给 ADC 输入已知的标准电压(如 1.0V、2.0V、3.0V);
- 读取对应的量化结果 n1、n2、n3;
- 拟合校准公式:V_IN = a×n + b(a 为斜率,b 为偏移量),替代理论公式。
(二)IMX6ULL ADC 硬件原理与寄存器深度解析
本次开发基于 IMX6ULL 处理器,其内置 2 个 12 位逐次逼近型 ADC 模块(ADC1 和 ADC2),每个模块支持 10 个模拟输入通道(ADC1_IN0~ADC1_IN9),集成于 SOC 内部,无需外部 ADC 芯片,降低硬件成本。
1. 硬件参考文档与关键引脚
- 核心板原理图:《IMX6ULL_CORE_V2.0 (核心板原理图).pdf》,明确 ADC 参考电压引脚为 ADC_VREFH(输入 3.3V 稳定电压),ADC_VREFL 引脚接地(0V);
- 底板原理图:《IMX6ULL_MINI_V2.2 (Mini 底板原理图).pdf》,定义 GPIO1_IO01 引脚(P4 模块 7 号引脚)作为 ADC 输入通道,对应 ADC1_IN1;
- 参考手册:《IMX6ULL 参考手册.pdf》,详细说明 ADC 模块的寄存器配置、时钟选择、校准流程等。
2. 关键硬件参数
- 分辨率:12 位(可通过寄存器配置为 8/10/12 位);
- 转换速率:最高可达 1MHz(采样频率 1MHz);
- 基准电压:3.3V(外部输入,ADC_VREFH);
- 输入电压范围:0~V_REF(0~3.3V);
- 通道映射:ADC1_IN1 对应 GPIO1_IO01 引脚,需通过引脚复用配置将 GPIO1_IO01 设置为 ADC 功能;
- 时钟源:支持 IPG 时钟、IPG/2 时钟、异步时钟(ADACK),本文选择异步时钟(稳定性更高)。
3. 核心寄存器深度解析(基于 IMX6ULL)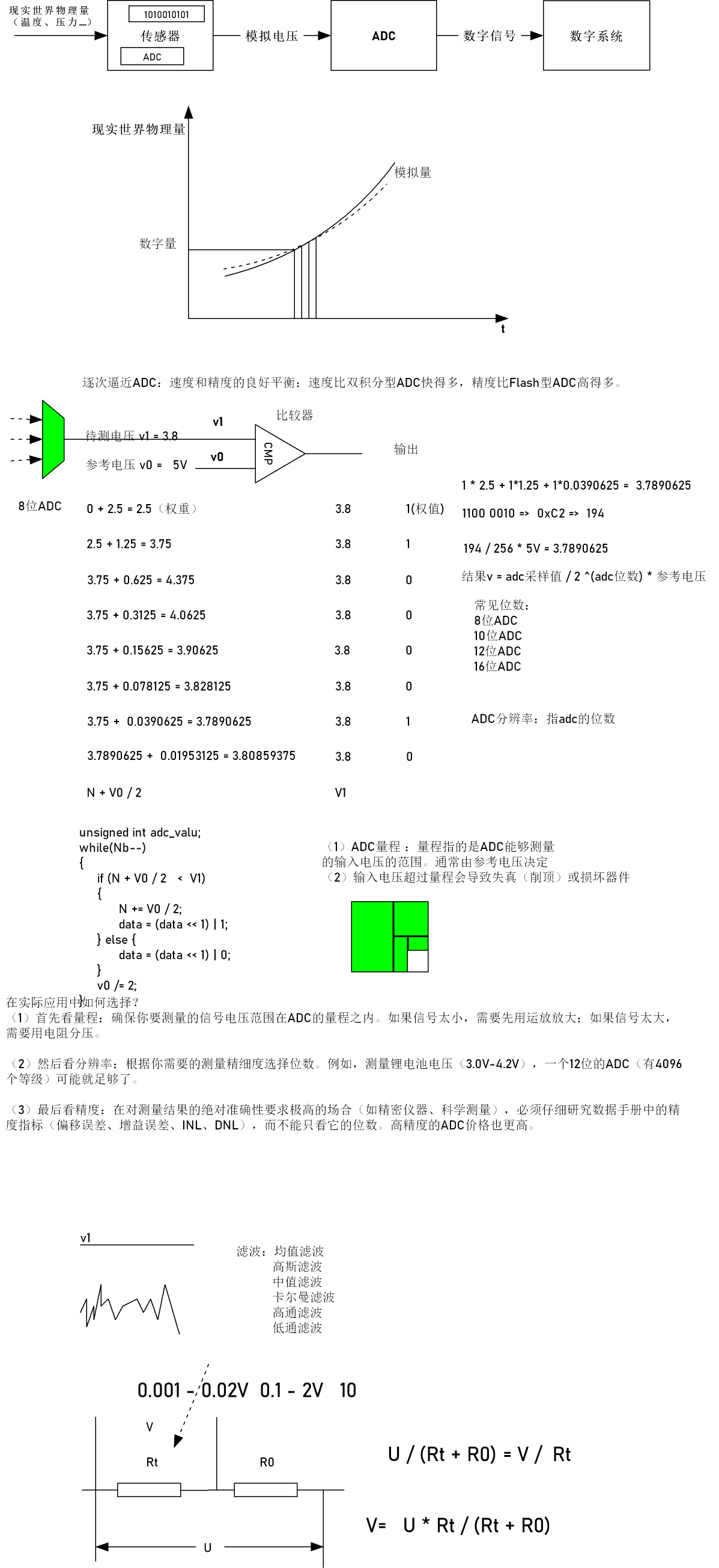
IMX6ULL ADC 模块的配置需涉及多个寄存器,以下是核心寄存器的功能与配置细节:
(1)控制寄存器(ADCx_HC0~HC3,共 4 个通道控制寄存器)
- 作用:配置单个 ADC 通道的转换模式、中断使能等;
- 关键位说明(以 ADC1_HC0 为例):
- AIEN(bit7):转换完成中断使能位,0 = 禁用中断(polling 模式),1 = 使能中断;
- ADCH(bit4~bit0):通道选择位,00000=ADC1_IN0,00001=ADC1_IN1,...,01001=ADC1_IN9;
- 配置示例:
ADC1->HC[0] &= ~(1 << 7);(禁用中断),ADC1->HC[0] |= (1 << 0);(选择 ADC1_IN1 通道)。
(2)状态寄存器(ADCx_HS)
- 作用:指示 ADC 通道的转换状态;
- 关键位说明:
- COCO0(bit0):通道 0 转换完成标志位,0 = 转换未完成,1 = 转换完成(读寄存器后自动清零);
- 配置示例:
while(!(ADC1->HS & (1 << 0)));(等待转换完成)。
(3)数据结果寄存器(ADCx_R0~R3)
- 作用:存储 ADC 转换后的数字量;
- 关键位说明:
- CDATA(bit11~bit0):12 位转换结果,bit11 为最高位,bit0 为最低位;
- 高 20 位(bit31~bit12)为保留位,无意义;
- 读取示例:
return ADC1->R[0] & 0xFFF;(读取低 12 位有效数据)。
(4)配置寄存器(ADCx_CFG)
- 作用:配置 ADC 的分辨率、时钟源、采样时间、功耗模式等;
- 关键位说明(重点!):
- MODE(bit3~bit2):分辨率配置,00=8 位,01=10 位,10=12 位,11 = 保留;
- ADICLK(bit1~bit0):时钟源选择,00=IPG 时钟,01=IPG/2 时钟,10 = 保留,11 = 异步时钟(ADACK);
- ADIV(bit6~bit5):时钟分频系数,00=1 分频,01=2 分频,10=4 分频,11=8 分频;
- ADLSMP(bit4):采样时间选择,0 = 短采样时间(默认),1 = 长采样时间(适用于高阻抗输入);
- ADHSC(bit10):高速配置,0 = 普通模式,1 = 高速模式(转换速率提升);
- 配置示例:
ADC1->CFG |= (2 << 2) | (3 << 0);(12 位分辨率,异步时钟源)。
(5)通用控制寄存器(ADCx_GC)
- 作用:配置 ADC 的全局功能(校准、连续转换、DMA 使能等);
- 关键位说明:
- CAL(bit7):校准启动位,0 = 校准未启动 / 已完成,1 = 校准中(写 1 启动校准,校准完成后自动清 0);
- ADCO(bit6):连续转换使能位,0 = 单次转换,1 = 连续转换;
- AVGE(bit5):硬件平均使能位,0 = 禁用硬件平均,1 = 使能硬件平均;
- DMAEN(bit1):DMA 使能位,0 = 禁用 DMA,1 = 使能 DMA(转换结果直接存入内存,无需 CPU 干预);
- ADACKEN(bit0):异步时钟输出使能位,0 = 禁用,1 = 使能(选择异步时钟源时必须置 1);
- 配置示例:
ADC1->GC |= (1 << 0);(使能异步时钟输出)。
(6)通用状态寄存器(ADCx_GS)
- 作用:指示 ADC 的全局状态(校准结果、转换状态等);
- 关键位说明:
- CALF(bit1):校准失败标志位,0 = 校准成功,1 = 校准失败(需写 1 清零);
- 配置示例:
if(ADC1->GS & (1 << 1)) { ADC1->GS |= (1 << 1); return -1; }(校准失败处理)。
(三)ADC 完整代码实现与优化(含校准、采样、滤波)
以下是基于 IMX6ULL 的 ADC 完整实现代码,包含引脚配置、初始化、校准、采样、电压换算、均值滤波等功能,每个函数均添加详细注释与逻辑解析:
#include "adc.h"
#include "MCIMX6Y2.h"
#include "fsl_iomuxc.h"
#include "stdio.h"
#include "delay.h" // 延时函数头文件(需自行实现)
// ADC配置参数
#define ADC_CHANNLE 1 // ADC通道(ADC1_IN1,对应ADCH=00001)
#define ADC_RESOLUTION 12 // 分辨率:12位
#define ADC_VREF 3.3f // 基准电压:3.3V
#define ADC_SAMPLE_TIMES 10 // 均值滤波采样次数
/**
* @brief ADC1校准函数(提升转换精度的关键步骤)
* @note ADC上电后必须执行校准,消除器件离散性带来的误差
* @retval 0-校准成功,-1-校准失败
*/
int adc1_calibration(void)
{
int ret = 0;
// 1. 清零校准失败标志位(CALF,bit1)
ADC1->GS |= (1 << 1);
// 2. 启动ADC校准(写1到CAL位,bit7)
ADC1->GC |= (1 << 7);
// 3. 等待校准完成(CAL位自动清0表示校准结束)
uint32_t timeout = 0xFFFF;
while((ADC1->GC & (1 << 7)) != 0)
{
timeout--;
if(timeout == 0)
{
printf("ADC calibration timeout!\n");
ret = -1;
goto exit;
}
delay_us(10); // 短暂延时,降低CPU占用
}
// 4. 检查校准结果(CALF=0表示成功,CALF=1表示失败)
if((ADC1->GS & (1 << 1)) != 0)
{
printf("ADC calibration failed!\n");
ret = -1;
// 清零校准失败标志位,为下次校准做准备
ADC1->GS |= (1 << 1);
}
else
{
printf("ADC calibration success!\n");
ret = 0;
}
exit:
return ret;
}
/**
* @brief ADC1引脚配置(复用+电气特性)
* @note GPIO1_IO01复用为ADC1_IN1,需配置为模拟输入模式
*/
void adc1_pin_config(void)
{
// 1. 引脚复用配置:GPIO1_IO01 -> ADC1_IN1
// IOMUXC_SetPinMux函数参数:引脚编号、复用模式(1=ALT1,对应ADC功能)
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO01_GPIO1_IO01, 1);
// 2. 引脚电气特性配置(模拟引脚需关闭数字功能)
// 配置参数说明:
// - PKE=1:使能上拉/下拉功能
// - PUE=0:配置为下拉模式(抑制外部干扰)
// - PUS=00:下拉电阻值(默认)
// - HYS=0:禁用滞回比较器
// - ODE=0:禁用开漏输出
// - SPEED=00:低速模式
// - DSE=00:驱动强度最低
// - SRE=0:禁用压摆率控制
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO01_GPIO1_IO01,
IOMUXC_SW_PAD_CTL_PAD_PKE(1) |
IOMUXC_SW_PAD_CTL_PAD_PUE(0) |
IOMUXC_SW_PAD_CTL_PAD_PUS(0) |
IOMUXC_SW_PAD_CTL_PAD_HYS(0) |
IOMUXC_SW_PAD_CTL_PAD_ODE(0) |
IOMUXC_SW_PAD_CTL_PAD_SPEED(0)|
IOMUXC_SW_PAD_CTL_PAD_DSE(0) |
IOMUXC_SW_PAD_CTL_PAD_SRE(0));
}
/**
* @brief ADC1初始化函数(完整配置流程)
*/
void adc1_init(void)
{
printf("Start initializing ADC1...\n");
// 1. 引脚配置(复用+电气特性)
adc1_pin_config();
// 2. 关闭ADC电源门控(确保ADC模块供电正常)
// (IMX6ULL的ADC模块默认上电,此处为冗余配置,增强代码鲁棒性)
// SIM->SCGC6 |= (1 << 27); // 若需开启电源门控,取消注释
// 3. 配置ADC核心参数(ADCx_CFG寄存器)
ADC1->CFG = 0; // 重置CFG寄存器,清除默认配置
// 配置分辨率:12位(MODE=10,bit3~bit2=10)
ADC1->CFG |= (2 << 2);
// 配置时钟源:异步时钟ADACK(ADICLK=11,bit1~bit0=11)
ADC1->CFG |= (3 << 0);
// 配置时钟分频:1分频(ADIV=00,bit6~bit5=00)
ADC1->CFG &= ~((3 << 5) | (3 << 6));
// 配置采样时间:短采样时间(ADLSMP=0,bit4=0)
ADC1->CFG &= ~(1 << 4);
// 4. 配置ADC全局功能(ADCx_GC寄存器)
ADC1->GC = 0; // 重置GC寄存器
// 使能异步时钟输出(ADACKEN=1,bit0=1)
ADC1->GC |= (1 << 0);
// 禁用连续转换(ADCO=0,bit6=0),启用单次转换
ADC1->GC &= ~(1 << 6);
// 禁用硬件平均(AVGE=0,bit5=0),后续使用软件均值滤波
ADC1->GC &= ~(1 << 5);
// 禁用DMA(DMAEN=0,bit1=0),使用polling模式
ADC1->GC &= ~(1 << 1);
// 5. 配置通道控制寄存器(ADCx_HC0)
// 禁用转换完成中断(AIEN=0,bit7=0)
ADC1->HC[0] &= ~(1 << 7);
// 6. 执行ADC校准
if(adc1_calibration() != 0)
{
printf("ADC1 initialization failed due to calibration error!\n");
}
else
{
printf("ADC1 initialization completed successfully!\n");
}
}
/**
* @brief 获取ADC1单次采样原始值
* @retval 12位采样原始值(0~4095),返回0xFFFF表示采样失败
*/
unsigned short adc1_single_sample(void)
{
// 1. 选择ADC通道(ADCH=ADC_CHANNLE=1,即ADC1_IN1)
ADC1->HC[0] = ADC_CHANNLE;
// 2. 等待转换完成(检测COCO0标志位)
uint32_t timeout = 0xFFFF;
while(!(ADC1->HS & (1 << 0)))
{
timeout--;
if(timeout == 0)
{
printf("ADC sample timeout!\n");
return 0xFFFF; // 返回异常值表示采样失败
}
delay_us(10);
}
// 3. 读取采样结果(低12位有效数据)
unsigned short sample_val = ADC1->R[0] & 0xFFF;
printf("ADC single sample value: %d\n", sample_val);
return sample_val;
}
/**
* @brief ADC均值滤波(软件滤波,抑制噪声)
* @note 多次采样取平均,采样次数越多,噪声抑制效果越好,但耗时越长
* @retval 滤波后的12位采样值
*/
unsigned short adc1_mean_filter(void)
{
unsigned int sum = 0;
unsigned char valid_cnt = 0; // 有效采样次数(排除失败的采样)
printf("Start ADC mean filter, sample times: %d\n", ADC_SAMPLE_TIMES);
for(unsigned char i = 0; i < ADC_SAMPLE_TIMES; i++)
{
unsigned short val = adc1_single_sample();
if(val != 0xFFFF) // 仅累计有效采样值
{
sum += val;
valid_cnt++;
}
delay_ms(1); // 采样间隔,避免采样过于密集导致信号未稳定
}
// 若有效采样次数为0,返回失败
if(valid_cnt == 0)
{
printf("No valid ADC sample data!\n");
return 0xFFFF;
}
// 计算平均值
unsigned short filter_val = sum / valid_cnt;
printf("ADC mean filter result: %d\n", filter_val);
return filter_val;
}
/**
* @brief 计算ADC采样对应的实际电压
* @retval 实际电压值(单位:V,保留3位小数),返回-1.0f表示计算失败
*/
float adc1_calculate_volt(void)
{
unsigned short filter_val = adc1_mean_filter();
if(filter_val == 0xFFFF)
{
printf("ADC voltage calculation failed!\n");
return -1.0f;
}
// 套用12位ADC电压计算公式(舍入量化)
float volt = (filter_val * ADC_VREF) / 4096.0f;
printf("ADC calculated voltage: %.3fV\n", volt);
return volt;
}
/**
* @brief 光敏传感器数据采集(应用层函数)
* @note 光敏传感器输出电压与光线强度成反比(光线越强,电压越低)
* @retval 光线强度等级(1-弱光,2-正常光,3-强光),返回0表示采集失败
*/
unsigned char light_sensor_collect(void)
{
float volt = adc1_calculate_volt();
if(volt < 0)
{
printf("Light sensor collect failed!\n");
return 0;
}
unsigned char light_level = 0;
// 根据实际光敏传感器特性调整阈值(需实测校准)
if(volt >= 2.0f)
{
light_level = 1; // 弱光(电压高)
printf("Light intensity: Weak\n");
}
else if(volt >= 1.0f && volt < 2.0f)
{
light_level = 2; // 正常光
printf("Light intensity: Normal\n");
}
else
{
light_level = 3; // 强光(电压低)
printf("Light intensity: Strong\n");
}
return light_level;
}代码优化亮点
- 分层设计:将代码分为引脚配置、初始化、校准、单次采样、滤波、电压换算、应用层采集 7 个函数,结构清晰,便于维护和复用;
- 异常处理:添加超时机制和错误返回值(如 0xFFFF 表示采样失败),避免程序死等,提升系统鲁棒性;
- 软件滤波:实现均值滤波功能,通过多次采样取平均抑制环境噪声,提升数据稳定性;
- 详细日志:每个关键步骤添加打印信息,便于开发调试和问题定位;
- 可配置参数:将通道号、分辨率、基准电压、采样次数等定义为宏,便于根据实际硬件调整,无需修改核心代码。
(四)ADC 应用场景扩展:光敏传感器数据采集
本文中 ADC 模块用于采集光敏传感器的模拟信号,光敏传感器的工作原理是 "光线强度变化导致其电阻值变化,进而导致输出电压变化",通常采用分压电路输出 0~3.3V 模拟电压:
- 硬件连接:光敏传感器一端接 3.3V,另一端接下拉电阻(10KΩ)和 ADC1_IN1 引脚,下拉电阻另一端接地;
- 信号特性:光线越强,光敏传感器电阻越小,分压后的输出电压越低;光线越弱,电阻越大,输出电压越高;
- 应用逻辑:通过 ADC 采集输出电压,根据电压值判断光线强度等级,可用于自动调节屏幕亮度、智能照明控制等场景。
三、核心技术总结与工程实践建议
(一)技术总结
-
I2C 通信:
- 核心优化:通过多字节寄存器地址兼容设计,解决不同设备的适配问题;
- 关键要点:严格遵循读 / 写时序,关注时序参数(如 SCL 高低电平持续时间、ACK/NACK 信号),添加异常处理;
- 实战案例:基于 LM75 温度传感器实现高精度温度采集,包含数据格式解析和负温度处理。
-
ADC 模数转换:
- 核心原理:逐次逼近型 ADC 通过 "采样→逼近→比较→编码" 实现模拟信号到数字信号的转换;
- 关键参数:分辨率、基准电压、采样频率直接影响转换精度和速度;
- 实战案例:基于 IMX6ULL ADC 实现光敏传感器数据采集,包含校准、采样、滤波、电压换算完整流程。
-
性能优化:
- 启用 FPU 提升浮点运算效率;
- 软件滤波(如均值滤波)抑制噪声;
- 分层设计和异常处理提升代码鲁棒性。
(二)工程实践建议
-
硬件设计建议:
- I2C 总线:合理选择上拉电阻值,避免总线负载过重,长距离通信需添加中继器;
- ADC 模块:使用高精度基准电压芯片,模拟信号线路尽量短且远离数字信号线路(避免电磁干扰),添加去耦电容(0.1μF)稳定电源;
- 传感器:确保传感器供电稳定,根据传感器特性选择合适的 ADC 通道和采样频率。
-
软件开发建议:
- 时序调试:使用示波器观察 I2C 的 SDA/SCL 线和 ADC 的输入信号,排查时序异常和信号干扰;
- 校准机制:ADC 上电后必须执行校准,定期校准可抵消温度漂移带来的误差;
- 数据处理:根据传感器特性设计合理的滤波算法(如均值滤波、中值滤波),避免异常值影响结果;
- 日志调试:添加详细的打印日志,便于定位通信失败、采样超时等问题。
-
常见问题排查指南:
问题现象 可能原因 排查方法 I2C 通信失败,无 ACK 设备地址错误、总线短路 / 断路、时序参数不匹配 1. 核对从设备地址;2. 用万用表检测 SDA/SCL 线是否导通;3. 用示波器观察时序参数 ADC 校准失败 基准电压不稳定、引脚配置错误、时钟源配置错误 1. 测量 ADC_VREFH 电压是否为 3.3V;2. 核对引脚复用配置;3. 检查 ADICLK 时钟源配置 ADC 采样数据波动大 环境噪声、电源纹波、采样频率过高 1. 增加均值滤波采样次数;2. 添加电源去耦电容;3. 降低采样频率,增加采样间隔 电压换算结果偏差大 基准电压实际值与理论值不符、ADC 分辨率配置错误 1. 实测基准电压,修正计算公式;2. 核对 ADC 分辨率配置(是否为 12 位)