代码地址:https://github.com/YvanYin/Metric3D
论文地址:https://arxiv.org/abs/2307.10984
解决了什么问题?
3D重建是自动驾驶、机器人等领域的核心技术。从图像中重建出准确的 3D 场景是一个长久以来存在的视觉任务。由于单张图片恢复3D信息是不适定问题(ill-posed),主流的成熟方法通常需要多视角几何(multi-view geometry),这就无法应用于仅有单张图片的场景,因为它们需要先验信息才能进行三维重建。当前单目深度估计的方法有两类局限:
- 只能针对单一的相机模型训练,无法混合不同的数据训练(因为不同的相机有不同的内参和尺度,导致尺度模糊性和 metric ambiguity),它们无法泛化到未见过的相机或场景。
- 另一种方法(如 MiDas、LeReS 和 HDN )虽然用大规模混合数据训练,实现了较好的零样本泛化(zero-shot generalization),但学的是仿射不变深度(affine-invariant depth),其深度仅在未知的偏移或缩放尺度下是准确的,无法恢复真实世界的绝对尺度(metric scale)。
作者认为,要实现零样本、单视图、绝对尺度的深度估计,关键要解决两个问题:
- 大规模数据训练。
- 解决不同相机模型带来的尺度模糊性。
于是作者提出了一个"规范相机空间变换模块",可以:
- 显式解决不同相机之间的尺度/内参模糊问题。
- 可轻易地插入现有的单目深度估计模型。
- 让模型能够用超过800万张图片、上千种相机模型进行稳定的训练,从而对未知相机拍摄的图片实现零样本泛化。
实验结果表明,本方法在7个零样本基准测试中达到SOTA(当前最优)性能。它可以做到:
- 从任意的网络图片中恢复精确的绝对尺度3D结构,使得"单张图片进行测量"成为可能。
- 提升下游任务性能,例如:显著缓解单目SLAM中的尺度漂移问题,实现高质量、绝对尺度的稠密地图构建。
根据预测深度的类型,现有的方法可以分为三种:学习度量深度、学习相对深度、学习仿射不变深度。尽管度量深度在各基准测试中效果不错,但它们需要在相同的相机内参的数据集上进行训练和测试。因此,度量深度方法的训练数据集通常较小,很难用同一台相机收集多样化场景的大规模数据集。后果就是,这些模型缺乏可迁移性,对真实世界的图像泛化能力就很差。另一种折中的方法就是学习相对深度,它只表示一个点比另一个点更远或更近,相对深度的应用很有限。学习仿射不变深度是上述两类方法之间的一个折中。通过使用大规模数据,它们在训练过程中解耦了度量信息,从而实现了出色的鲁棒性和泛化能力。目前最先进的 LeReS 可以恢复真实世界的三维场景,但仅能恢复到未知的尺度和偏移。
本文主要关注在零样本、可迁移、度量深度估计这一目标上。首先,作者分析了单目深度估计的度量模糊性问题,研究了不同相机参数,包括像素大小、焦距和传感器大小。作者认为,焦距是恢复深度的关键因素,需要一种不依赖有限相机类型、且能显式处理焦距变化的方法。
- LeReS 在训练时忽略了焦距信息,导致模型在遇到不同焦距的图片时,无法确定其绝对尺度,因此只能放弃度量信息,输出仿射不变深度。
- 另一类方法如 CamConv 尝试将相机模型编码到网络中,让网络从图片外观中隐式地理解相机参数,但这种方法严重受限于训练数据中相机类型的数量和多样性,网络容量有限,难以泛化到无数种未知的相机。
作者从人体姿态重建领域获得灵感,
- 人体姿态重建:为了处理无数种人体姿态,研究者将所有样本映射到一个规范姿态空间(如"T-pose")进行训练,以减少姿态差异。
- 本文思路:为了处理无数种相机,我们将所有训练数据映射到一个规范相机空间。经过变换后,所有图片都被粗略地视为由同一台"规范相机"拍摄。
那么如何实现这种变换?作者提出了两种在训练时使用的并行方法,
- 调整图片外观:通过图像处理技术(如模拟不同的焦距效果),将原始图片"变换"成由规范相机拍摄的样子。
- 变换真值标签:保持原始图片不变,但根据原始相机与规范相机之间的参数差异,相应地变换深度图的真值标签,使其与规范相机匹配。
这样做,相机模型没有被编码进网络。网络永远只学习"规范相机"这一种成像模式。这使得该方法可以轻松即插即用到任何现有的深度估计网络架构中。在进行预测时,只需对网络的输出(在规范相机空间下的深度)做一个逆变换,即可恢复出原始图片对应的真实度量深度。
为了解决仿射不变深度方法中,全局归一化损失会弱化局部细节的问题,作者提出了一个新的损失函数 --- 随机区域归一化损失。这个损失函数迫使网络不仅关注图片的全局几何结构,还要精确地学习每个局部区域的深度细节和分布,从而显著提升深度图的局部精度和细腻程度。
- 旧方法(尺度-偏移不变损失):在整张图片上进行全局归一化。这虽然强调了整体深度分布,但会"压扁"细微的深度差异(例如物体表面的纹理起伏)。
- 随机区域归一化损失:从图片中随机裁剪多个小图块,在每个图块上,独立地使用尺度-偏移不变损失。
意义
- 大规模训练和卓越性能:通过本文方法,我们可以轻松地将模型训练扩展到来自11个数据集的800万张图像。之前的方法因为无法混合不同相机数据,数据集规模受限。而本文的规范相机空间变换模块解决了相机差异,使得用海量、多源、多相机数据训练成为可能。
- 实现单图像测量学:仅凭一张照片,就能进行真实的物理测量(如估算物体的长度、高度、面积)。本文首次让基于学习的方法、在无需已知相机参数的前提下、可靠地实现这一目标成为可能。
- 赋能下游任务:超越仿射不变模型,仿射不变深度缺少尺度,像SLAM、3D重建等需要精确尺度的任务无法直接使用。单目SLAM在长距离运行时,会产生严重的尺度漂移(估计的地图整体被放大或缩小)。将本文预测的度量深度作为强约束引入SLAM系统,能显著降低尺度漂移,从而得到更高质量、具有真实世界度量尺度的地图。
相关工作
单图像三维重建
从单张图片重建各种物体已经被广泛地研究,主要挑战就是如何利用有限的内存、最好地恢复物体的细节,以及如何做到泛化。此类方法的局限就是:
- 依赖类别先验:模型必须针对特定物体类别进行训练(比如专门训一个重建汽车的模型)。
- 依赖3D监督:通常需要物体的3D模型(如CAD模型)作为训练真值,数据获取成本高。
- 无法重建完整场景:它们只能重建图片中的一个孤立物体,而不是包含背景、多个物体、复杂布局的整个场景。
针对场景的重建,这类工作和本文类似,但也有根本不足之处:
- 早期方法(如Saxena等):将场景分割成多个小平面,通过平面的朝向和位置来表征3D结构。这种方法假设过于简化,无法处理复杂的自然场景。
- 近期SOTA的方法如 LeReS 使用强大的单目深度估计模型作为基础来重建场景,取得了显著进步。
- 局限:它们生成的深度是仿射不变或尺度不变的。这意味着重建出的3D场景形状是正确的,但整体尺寸是随机的、未知的("up to a scale")。
有监督的单目深度估计
作者将监督式单目深度估计的发展分为三个阶段/方向,其演进体现了"泛化能力"与"度量精度"之间的权衡:
早期:针对特定数据集的度量深度模型
- 背景:在NYU Depth、KITTI等标准基准数据集出现后,基于神经网络的方法成为主流。
- 方法:
- 回归法:直接预测连续的深度值。
- 分类法:将深度值离散化,将回归问题转化为分类问题,性能更好。
- 缺陷:这些模型是"数据集特化" 的。它们在特定数据集(通常由固定相机拍摄)上精度很高,但完全无法泛化到新场景或新相机。它们的目标是"度量精度",但牺牲了"泛化能力"。
为求泛化的第一次妥协:学习相对深度
- 动机:解决模型无法泛化到多样场景的问题。
- 方法:构建大规模相对深度数据集(如DIW, OASIS),其中标注只指明点A比点B更近还是更远,而非具体距离。
- 结果:模型获得了优秀的场景泛化能力。
- 新问题:输出丢失了几何结构信息(只知道前后顺序,不知道形状和绝对距离),应用价值受限。这是用牺牲全部度量信息来换取泛化。
为求泛化的第二次妥协:学习仿射不变深度
- 动机:在获得泛化能力的同时,尽可能保留更多几何信息。
- 方法:混合使用多个大规模数据集进行训练,学习仿射不变深度(如MiDaS, LeReS, HDN)。输出深度与真实深度存在一个全局的尺度和平移关系(预测值 = a * 真实值 + b)。
- 结果:取得了当前最佳的零样本泛化性能,且恢复了较好的场景几何结构。
- 根本局限:仍无法恢复真实度量信息(因为尺度因子a和偏移b未知)。这是用牺牲绝对尺度来换取泛化和几何。
大规模数据训练
无论是自然语言处理(NLP)还是计算机视觉(CV),利用海量数据进行训练都带来了惊人的进步。CLIP 通过在数十亿级别的"图片-文本"对上训练,实现了强大的零样本图像分类能力。这说明大规模数据是获得通用、可泛化模型的关键。在深度预测任务上,采用大规模数据训练也已成为一种广泛应用的、行之有效的做法。列举了几个前沿工作作为证据:
- MiDaS:在超过200万数据上训练。
- LeReS:收集了超过30万数据。
- Other Work:也有工作合并了数百万数据来构建强大的深度预测模型。
方法
前提
本文使用的小孔成像相机模型的内参包含了: \[ f \^ / δ , 0 , u 0 , 0 , f \^ / δ , v 0 , 0 , 0 , 1 ] \[\\hat{f}/\\delta, 0, u_0, 0, \\hat{f}/\\delta, v_0, 0,0,1] \[f\^/δ,0,u0,0,f\^/δ,v0,0,0,1],其中 f ^ \hat{f} f^是焦距(微米), δ \delta δ是单个像素的物理尺寸(微米), ( u 0 , v 0 ) (u_0, v_0) (u0,v0)是相机主点。 f = f ^ / δ f=\hat{f}/\delta f=f^/δ 是用像素个数表示的焦距值。
度量模糊性分析
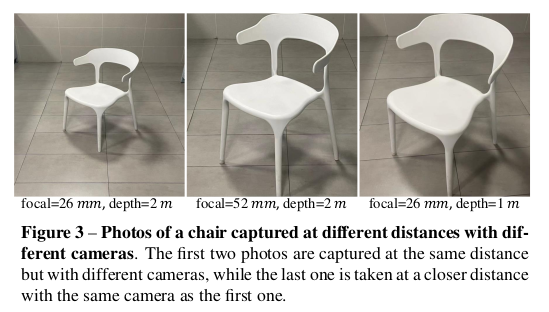
下图是不同相机在不同距离拍摄的图片。仅从图像的外观来看,人们可能认为最后两张图片是在接近的位置用同一个相机拍摄的。实际上,由于焦距不同,这些图片是在不同的位置拍摄的。因此,对于从单张图片估计度量距离来说,相机内参非常关键。为了避免度量模糊性,MiDaS 和 LeReS 从监督信号中解耦了度量,妥协地去学习仿射不变的深度。
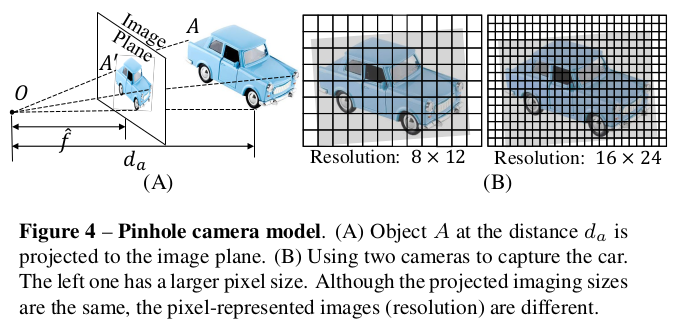
下图A 展示了一个简单的小孔透视投影。位于 d a d_a da的物体 A A A投影到 A ′ A' A′。根据相似性原理,我们可以得到等式
d a = S ^ f \^ S \^ ′ = S ^ ⋅ α d_a = \hat{S}\\frac{\\hat{f}}{\\hat{S}'}=\hat{S}\cdot \alpha da=S^S\^′f\^=S^⋅α
其中 S ^ \hat{S} S^和 S ^ ′ \hat{S}' S^′是真实和投影后的大小。 ⋅ ^ \hat{\cdot} ⋅^表示它的单位是物理尺寸(微米)。为了从单张图片恢复 d a d_a da,必须要有焦距、真实世界的物体大小和物体在图像上的大小。从单张图片估计焦距是非常有挑战性且不适定的问题。目前的方法都不是很令人满意。这里作者假设训练/测试图像的焦距是已知的,来简化问题。相比之下,理解成像尺寸(物体在图片上占多少个像素)对神经网络来说要容易得多。神经网络(特别是卷积神经网络)是天生的图像处理专家,它非常擅长从像素分布中识别物体的大小、形状和相对位置。这是它的"本职工作"。为了获得物体的真实世界尺寸,神经网络需要理解语义场景布局和物体本身,而这正是神经网络所擅长的。作者定义了 α = f ^ / S ^ ′ \alpha=\hat{f}/\hat{S}' α=f^/S^′,因此 d a d_a da与 α \alpha α是正比关系。恢复真实尺寸是一个"三角测量"问题:你需要结合两个信息:
- 角度信息:由焦距决定,物体在相机视角中张开了多大的角度,焦距是网络难以直接从图片外观中精确学习得到的。
- 像素尺寸信息:这个角度在图片上对应了多少像素?这由物体的真实大小和距离共同决定。网络可以凭其强大的语义理解能力来判断:这是一辆"汽车"(已知真实尺寸大概为4-5米长)还是一个"杯子"(已知大概0.1米高)。
关于传感器尺寸、像素尺寸和焦距,作者由如下发现。
O1: 在针孔相机模型中,影响单目度量深度估计的关键相机参数是焦距,而传感器尺寸和像素尺寸并不直接影响深度估计 。根据透视投影,传感器大小只会影响视场角(FoV),传感器越大,在相同焦距下,能捕捉到的场景范围(FOV)越宽。 d a S ^ = f ^ S ^ ′ \frac{d_a}{\hat{S}} = \frac{\hat{f}}{\hat{S}'} S^da=S^′f^ 这个公式是关键,因此传感器大小和 α \alpha α无关,就不会影响度量深度估计。对于像素尺寸,我们假设由两个像素尺寸( δ 1 = 2 δ 2 \delta_1=2\delta_2 δ1=2δ2)不同而焦距相同 f ^ \hat{f} f^的相机模型,在 d a d_a da距离拍摄同一个物体。下图B展示了它们拍摄的图片。如前所述,像素个数表示的焦距值 f 1 = 1 2 f 2 f_1 = \frac{1}{2}f_2 f1=21f2。由于第二个相机的像素尺寸更小,尽管它们在图像上的投影大小都是 S ^ ′ \hat{S}' S^′,但像素个数表示的图像分辨率是 S 1 ′ = 1 2 S 2 ′ S'_1 = \frac{1}{2}S'_2 S1′=21S2′。根据等式1, f ^ δ 1 ⋅ S 1 ′ = f ^ δ 2 ⋅ S 2 ′ \frac{\hat{f}}{\delta_1 \cdot S'_1} = \frac{\hat{f}}{\delta_2 \cdot S'_2} δ1⋅S1′f^=δ2⋅S2′f^,即 α 1 = α 2 \alpha_1 = \alpha_2 α1=α2,所以由 d 1 = d 2 d_1 = d_2 d1=d2。因此,不同的相机传感器不会影响度量深度估计。
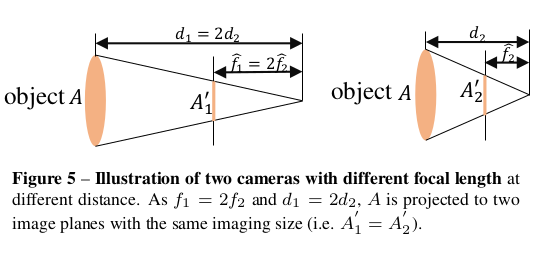
O2:焦距对于度量深度估计非常重要 。图3展示了由于焦距未知而导致的度量模糊性问题。下图也说明了这点。如果两个不同的相机( f ^ 1 = 2 f ^ 2 \hat{f}_1 = 2\hat{f}_2 f^1=2f^2)在不同的距离 d 1 = 2 d 2 d_1 = 2d_2 d1=2d2,投影图像尺寸却是一样的。因此,只从外观来看,当监督信号不同时,网络会非常迷惑。于是作者提出了一个规范相机变换方法,解决监督信号和图像外观冲突的问题。
规范相机变换
这儿的核心思想就是设定一个规范的相机空间 ( ( f x c , f y c ) , f x c = f y c = f c ) ((f_x^c, f_y^c), f_x^c=f_y^c=f^c) ((fxc,fyc),fxc=fyc=fc),然后将所有的训练数据都变换到此空间。因此,所有的数据都可以当作是通过规范相机拍摄的。作者提出了两种变换方法,要么变换输入图像 I ∈ R H × W × 3 \mathbf{I}\in \mathbb{R}^{H\times W\times 3} I∈RH×W×3,要么变换真实标签 D ∈ R H × W \mathbf{D}\in \mathbb{R}^{H\times W} D∈RH×W。原始的内参是 { f , u 0 , v 0 } \{f,u_0,v_0\} {f,u0,v0}。
方法1:变换深度标签
第一个方法是直接变换真实深度标签来解决这个问题。在训练时,将真实深度 D ∗ \mathbf{D}^\ast D∗ 通过比值 ω d = f c f \omega_d = \frac{f^c}{f} ωd=ffc来缩放,即 D c ∗ = ω d D ∗ \mathbf{D}^\ast_c = \omega_d \mathbf{D}^\ast Dc∗=ωdD∗。推理时,预测深度 D c \mathbf{D}_c Dc是在规范空间,需要进行逆变换来恢复度量信息,即 D = 1 ω d D c \mathbf{D} = \frac{1}{\omega_d} \mathbf{D}_c D=ωd1Dc。注意,输入图像 I \mathbf{I} I不用做任何的变换,即 I c = I \mathbf{I}_c=\mathbf{I} Ic=I。
方法2:变换输入图像
从另一个视角来看,模糊性也可以认为是相似图像外观造成的。因此可以通过变换输入图像来模拟规范相机拍摄的效果。将输入图像 I \mathbf{I} I通过系数 ω r = f c f \omega_r=\frac{f^c}{f} ωr=ffc缩放,即 I c = T ( I , ω r ) \mathbf{I}_c=\mathcal{T}(\mathbf{I}, \omega_r) Ic=T(I,ωr),其中 T \mathcal{T} T表示图像缩放。光学中心也被缩放了,因此规范相机模型就是 { f c , ω r u 0 , ω r v 0 } \{f^c, \omega_r u_0, \omega_r v_0\} {fc,ωru0,ωrv0}。真实标签会进行无缩放的重置大小操作,即 D c ∗ = T ( D ∗ , ω r ) \mathbf{D}^\ast_c = \mathcal{T}(\mathbf{D}^\ast, \omega_r) Dc∗=T(D∗,ωr),他们只改变图片的尺寸(像素矩阵的行列数),但不改变深度图中每个像素所代表的真实物理深度值。推理时,逆变换将预测结果缩放到原始尺寸,即 D = T ( D c , 1 ω r ) \mathbf{D}=\mathcal{T}(\mathbf{D}_c, \frac{1}{\omega_r}) D=T(Dc,ωr1)。
下图展示了这个流程。变换完成后,随机裁剪图块用于训练。裁剪操作只调整 FOV 和光学中心,不会造成任何度量模糊性问题。在标签变换方法中, ω r = 1 , ω d = f c f \omega_r=1, \omega_d=\frac{f^c}{f} ωr=1,ωd=ffc,而在图像变换方法中 ω d = 1 , ω r = f c f \omega_d=1, \omega_r=\frac{f^c}{f} ωd=1,ωr=ffc。训练的目标是
min θ ∣ N d ( I c , θ ) − D c ∗ ∣ \min_\theta |\mathcal{N}_d(\mathbf{I}_c, \theta) - \mathbf{D}^\ast_c| θmin∣Nd(Ic,θ)−Dc∗∣
其中 θ \theta θ是网络 N d \mathcal{N}_d Nd的参数。 D c ∗ \mathbf{D}^\ast_c Dc∗和 I c \mathbf{I}_c Ic是变换后的真实深度标签和图像。
混合数据训练是提升模型泛化能力的有效途径。作者收集了11个不同的数据集进行混合训练。这确保了数据在场景类型(如室内、室外、城市、自然)、物体类别和视觉外观上具有极高的多样性,让模型能学到通用的3D结构先验,而非特定数据集的特征。数据中包含了超过10,000种不同的相机(如各种型号的手机、数码相机、行车记录仪等)。所有收集的数据必须包含配对的相机内参,这是本文提出的规范相机空间变换模块所需的必要条件。
监督损失
为了进一步提升表现,作者提出了一个随机区域归一化损失。目前主流的、用于训练仿射不变深度模型(如MiDaS, LeReS)的尺度-偏移不变损失具有以下的局限性:
- 原理:对整张图片的深度预测值和真值,分别计算中位数和绝对中位差,然后进行归一化,使得两者的尺度和偏移一致。这样做可以"解耦"绝对尺度,让网络专注于学习图片内部的相对深度结构。
- 缺点:这种全局归一化 会"压平"图片中细粒度的深度差异。具体来说,在那些距离相机很近的区域,物体表面的起伏、褶皱、小结构之间的微小深度差别,在整张图的全局统计量对比下变得不再明显,导致网络在训练时对这些局部细节的学习动力不足,预测结果容易显得"平滑"而缺乏精细的几何纹理。
为了解决上述问题,作者提出了一种"分而治之" 的策略:
- 随机裁剪:在训练时,从规范相机空间下的深度图真值 D c ∗ \mathbf{D}^\ast_c Dc∗ 和预测的深度图 D c \mathbf{D}c Dc 中随机裁剪出多个小块, p i ( i = 0 , . . . , M ) ∈ R h i × w i p{i(i=0,...,M)} \in \mathbb{R}^{h_i\times w_i} pi(i=0,...,M)∈Rhi×wi。
- 局部归一化:对于每一对裁剪出的真值小块和预测小块,独立地应用中位数绝对偏差归一化。这个操作具体是:
- 计算小块内深度值的中位数和绝对中位差。
- 用这个局部统计量对该小块进行归一化。
- 计算损失:在这些归一化后的小块对上,计算损失函数(如L1或L2损失),然后对所有小块损失求平均。
损失函数如下:
L R P N L = 1 M N ∑ p i M ∑ j N ∣ d p i , j ∗ − μ ( d p i , j ∗ ) 1 N ∑ j N ∣ d p i , j ∗ − μ ( d p i , j ∗ ) ∣ − d p i , j − μ ( d p i , j ) 1 N ∑ j N ∣ d p i , j − μ ( d p i , j ) ∣ ∣ L_{RPNL}=\frac{1}{MN}\sum_{p_i}^M \sum_{j}^N |\frac{d^\ast_{p_i,j} - \mu(d^\ast_{p_i,j})}{\frac{1}{N}\sum_j^N |d^\ast_{p_i,j} - \mu(d^\ast_{p_{i},j})|} - \frac{d_{p_i,j} - \mu(d_{p_i,j})}{\frac{1}{N}\sum_j^N |d_{p_i,j} - \mu(d_{p_{i},j})|}| LRPNL=MN1pi∑Mj∑N∣N1∑jN∣dpi,j∗−μ(dpi,j∗)∣dpi,j∗−μ(dpi,j∗)−N1∑jN∣dpi,j−μ(dpi,j)∣dpi,j−μ(dpi,j)∣
这里 d ∗ ∈ D c ∗ d^\ast \in \mathbf{D}^\ast_c d∗∈Dc∗是真实深度, d ∈ D c d \in \mathbf{D}c d∈Dc 是预测深度。 μ ( ⋅ ) \mu(\cdot) μ(⋅)是深度的中位数。 M M M是候选裁剪区域的个数,设为 32。训练时,从图像中随机裁剪候选区域,大小是原图尺寸的 0.125 0.125 0.125 到 0.5 0.5 0.5。此外,也用了其它的几项损失,包括了缩放无关的对数损失 L s i l o g L{silog} Lsilog、对范数回归损失 L P W N L_{PWN} LPWN、虚拟范数损失 L V N L L_{VNL} LVNL。注意 L s i l o g L_{silog} Lsilog 是 L1 损失的变种。整体损失如下:
L = L P W N + L V N L + L s i l o g + L R P N L L=L_{PWN}+L_{VNL}+L_{silog}+L_{RPNL} L=LPWN+LVNL+Lsilog+LRPNL