目前,"无人机航线辅助模块"没有单一的定义,但根据实现方式和核心功能,可以将其理解为一套旨在提升无人机航线规划、飞行执行和自主导航能力的硬件与软件组合。这涵盖了从硬件导航模块、地面站软件到全自主飞行系统等多个层面的技术方案。
主流技术方案对比
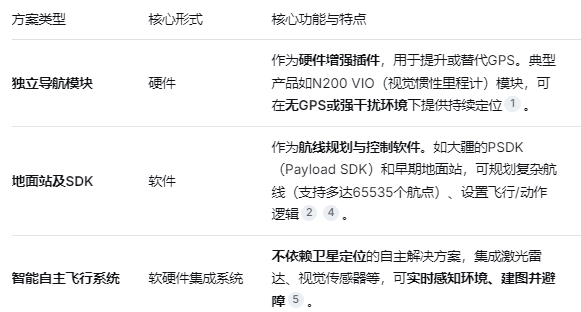
核心技术解析
无论哪种方案,都依赖于一些共同的核心技术来保证精确的航线控制:
导航与定位技术:这是航线执行的基础。通常采用多传感器融合的方式,结合GPS、惯性测量单元(IMU)、视觉传感器、激光雷达等数据,通过算法(如卡尔曼滤波)得出精确的位置和姿态。
控制算法:是无人机的"大脑"。经典的PID控制算法应用广泛,它能根据预设航线与实时位置的偏差,不断调整飞行姿态。更高级的算法如模型预测控制(MPC)能让飞行更顺滑。
感知与避障:实现全自主飞行的关键。通过搭载的视觉、激光雷达等传感器实时感知环境,并利用SLAM(即时定位与地图构建) 等技术在陌生环境中生成地图,规划安全路径。
发展趋势
未来,无人机航线辅助模块正朝着更高自主性和更强环境适应性的方向发展:
1.从"辅助"到"自主":系统将不再仅仅是执行预设航线,而是能实时感知环境变化、自主决策并规划动态最优路径,以应对突发障碍或任务变更。
2.脱离GPS依赖:在室内、隧道、林区或强干扰环境中,视觉导航、激光雷达导航及其融合技术将发挥核心作用,实现完全自主飞行。
3.集群与协同:多个无人机通过通信网络共享信息,实现编队飞行、分工协作,完成大范围区域搜索、协同运输等复杂任务。
