引言:为什么我们需要"图"?
在现实世界中,很多事物之间的关系并不是简单的"一对一"或"一对多"能描述的。比如:
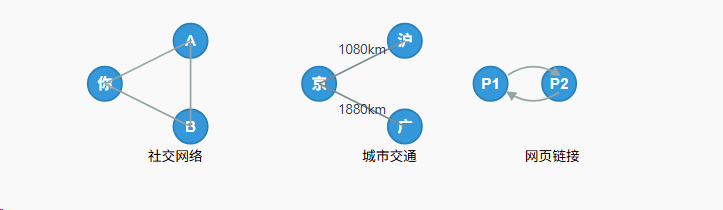
- 社交网络: 你和你的朋友们,每个人是一个点(顶点 ),朋友关系就是一条线(边)。
- **城市交通:**每个城市是一个点,城市之间的公路是一条线。
- **网页链接:**每个网页是一个点,网页A跳转到网页B的链接就是一条有方向的线。
这些"多对多"的关系网络,就是"图"(Graph)数据结构要描述的问题。图是一种用来表示物体与物体之间复杂关系的非线性数据结构。
1、图的基本概念
一个图 G 由两个集合组成:顶点 集 V 和 边 集 E。我们通常记为 G = (V, E)。下面是学习图必备的词汇:
1.1、有向图和无向图
这是对"关系"最基本的分类。
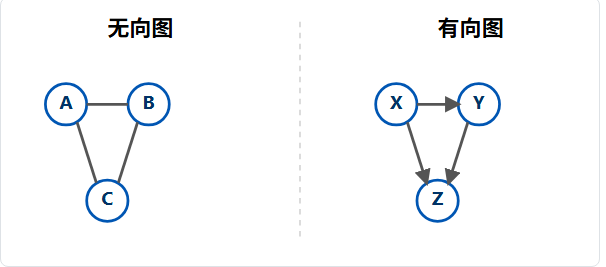
- 无向图:边是没有方向的。如果 A 和 B 之间有边,意味着 A 到 B 和 B 到 A 是等价的。比如"好友关系"、"公路相连"。
- 有向图 :边是有方向的。A 到 B 的边(表示为
<A, B>)和 B 到 A 的边(<B, A>)是不同的。比如"关注关系"(A 关注 B,不代表 B 关注 A)、"超链接"。
1.2、带权图和无权图
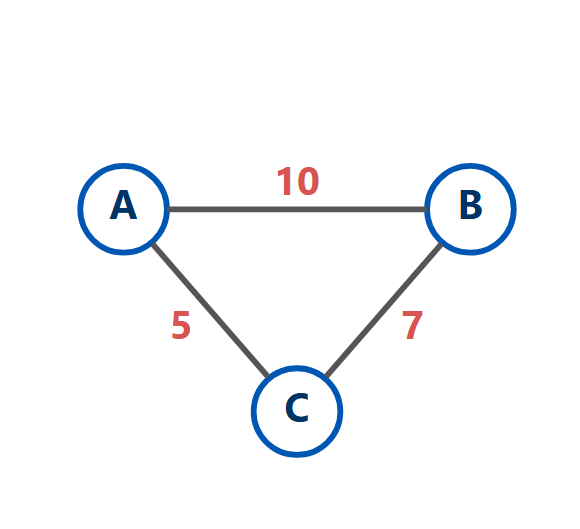
这是对"关系强度"的描述。
- 无权图:所有边都一样,只关心"有"或"没有"连接。
- 带权图:每条边都有一个关联的数值(权重),表示这个连接的"成本"、"距离"或"强度"。比如地图上的公路距离。
1.3、顶点的度
"度"是衡量一个顶点"繁忙"或"重要"程度的最基本指标。
- 无向图的度 :一个顶点A的度 (
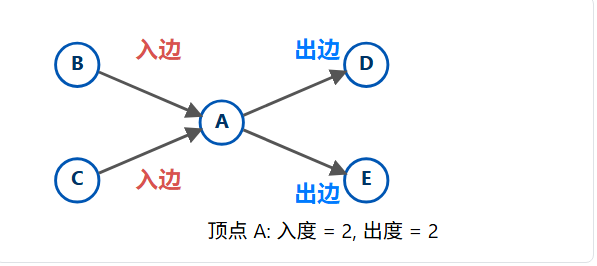
deg(A)) 是指直接连接到A的边的数量 。在1.1图示例中,deg(A) = 2,deg(B) = 2,deg(C) = 2。 - 有向图的度 :在有向图中,关系有方向,因此"度"被细分为:
- 入度 :指向该顶点的边的数量。
- 出度 :从该顶点出发的边的数量。
为什么要区分"度"?
"度"是分析节点影响力的最基本指标。
在有向图中,入度和出度的含义截然不同。以社交网络(有向图)为例:
- 高入度:意味着很多人"关注"你(例如微博、Twitter)。这是"影响力"或"受欢迎程度"的体现。
- 高出度:意味着你"关注"了很多人。这可能是"信息获取者"或"活跃用户"的体现。
很多图算法的起点就是基于对"度"的分析。
1.4、路径
路径是从一个顶点到另一个顶点所经过的顶点序列。一条路径由一系列的边连接而成。
- 简单路径 :一条路径中,所有顶点(除了可能的起点和终点)只出现一次。这是我们最常讨论的路径类型。
- 路径长度:路径上边的数量(无权图)或边的权重之和(带权图)。
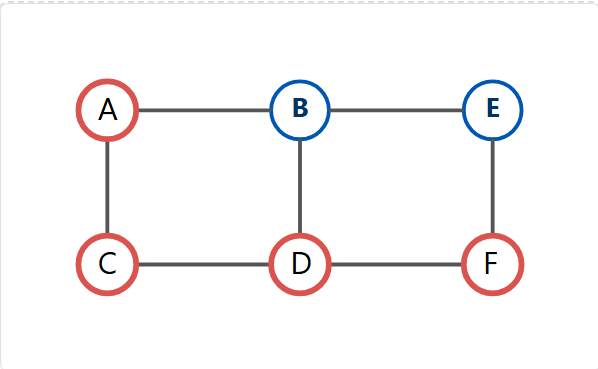
一条从 A 到 F 的简单路径: A → C → D → F (长度为3)
为什么"路径"如此重要?
**路径是"可达性"和"成本"的量化。**图算法的核心问题几乎都与路径相关:
- 可达性问题:"A能到F吗?" ------ 这个问题等价于 "A和F之间存在路径吗?" (BFS/DFS 可以解决)
- 最短路径问题:"A到F最近的路怎么走?" ------ 这个问题是 "A到F的最短路径长度是多少?" (BFS / Dijkstra 算法可以解决)
1.5、环
环是一条特殊的路径,它的起点和终点是同一个顶点。一个简单的环是指除了起点/终点相同外,其他顶点不重复的环。
- 无向图中的环:很容易理解,像"B-C-D-B"这样的闭合回路。
- 有向图中的环 :必须严格遵循箭头方向 。例如,
A → B → C → A是一个环;但A → B ← C ← A这不是一个环,而只是两组边。
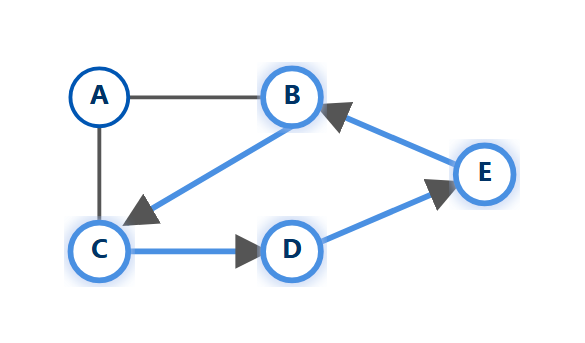
一个有向环: B → C → D → E → B
为什么要关心"环"?
**环代表"依赖"或"死循环"。**检测环的存在是图算法的一个重要应用:
- 任务调度 (有向图) :如果你有一个任务依赖图(A必须先于B,B必须先于C),如果出现一个环 (
A → B → C → A),则意味着这个任务永远无法完成!(A等C,C等B,B等A)。这种没有环的有向图称为"有向无环图"(DAG),它至关重要。 - 死锁检测:在操作系统中,如果进程A在等待进程B的资源,而B在等待A的资源,这就形成了一个环,导致死锁。
1.6、连通性
连通性描述的是图中顶点之间"相互到达"的程度。这个概念在无向图和有向图中差异很大。
1. 无向图:连通图 vs. 连通分量
- 连通图 :如果一个无向图中,任意 两个顶点之间都存在路径,则称该图为连通图。
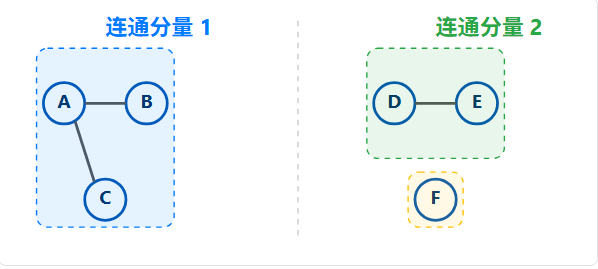
- 连通分量:如果一个无向图不是连通的,它会自然地"碎裂"成几个独立的子图,每个子图内部是连通的。这些独立的子图就叫作"连通分量"。
一个包含 3 个连通分量 ( {A,B,C}, {D,E}, {F} ) 的无向图
2. 有向图:强连通 vs. 弱连通
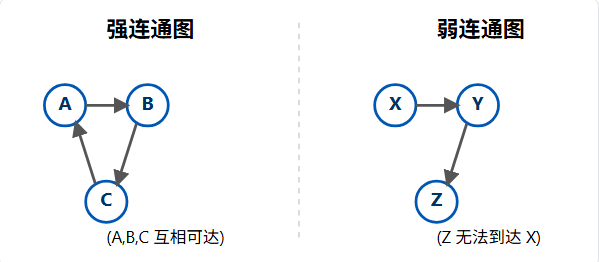
- 强连通图 :这是最严格的连通。如果一个有向图中,任意 两个顶点
u和v,都存在一条从u到v的路径 并且 存在一条从v到u的路径。这意味着图中的每个点都可以"互相到达"。 - 弱连通图:如果我们"忽略"边的方向(即把所有有向边都当作无向边),得到的无向图是连通的,那么原有向图就是弱连通的。
为什么"连通性"如此重要?
连通性决定了"信息的流动"和"系统的划分"。
- 连通分量:(无向图) 告诉你一个网络被分成了多少个"小岛"。在社交网络中,这可以帮你识别不同的社群或圈子。在网络诊断中,如果你的电脑和打印机不在一个连通分量里,它们就无法通信。
- 强连通:(有向图) 这是一个非常"健壮"的结构。在一个强连通的交通网络中,无论发生什么(比如修路),你总能找到另一条路从A到B(也总能从B开回A)。
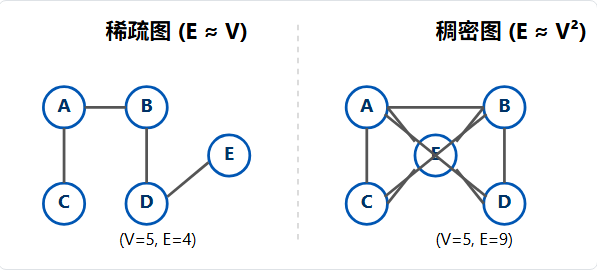
1.7、稠密图 和 稀疏图
这是一个基于"边-点"数量关系的实用分类。假设 V 是顶点数,E 是边数。
一个完全图 (任意两点间都有边)的边数大约是 V2 / 2。我们以此为基准:
- 稀疏图 :边的数量 E 远远小于 V2。通常 E 和 V 差不多是同一个数量级(例如 E 约等于 O(V))。
- 稠密图 :边的数量 E 接近 V2。也就是说,大部分顶点对之间都存在边。
为什么这很重要?
选择"稠密"还是"稀疏"的存储方式,会极大地影响算法的空间复杂度 和时间复杂度。我们将在下一章详细探讨。
2、图的数学性质
图作为一种数学模型,具有一些非常优美和实用的性质。理解它们有助于我们更深刻地认识图的结构和算法的边界。
2.1、握手定理
这是一个关于无向图 的基本定理:图中所有顶点的度数之和,等于边数的两倍。
∑ deg(v) = 2 * E
其中 deg(v) 是顶点 v 的度,E 是边数。
为什么是两倍?
这个道理非常直观。想象一下你和朋友们握手:
- 每一条"边"代表一次"握手"。
- 每一次"握手"都恰好连接了"两个"顶点(两个人)。
- 当我们去统计每个顶点的"度"(每个人握了多少次手)并把它们加起来时,A说"我握了手",B也说"我握了手"。
- 对于连接 A 和 B 的那条边(那次握手),它既被 A 统计了一次,也被 B 统计了一次。
因此,每一条边在"度数之和"中都恰好被计算了两次。所以,总度数和 = 2 * 总边数。
重要推论:在一个无向图中,度数为奇数的顶点,其个数必定是偶数。
为什么奇数度的顶点必为偶数个?
我们知道总度数和 (2 * E) 必定是一个偶数。
这个总和可以被拆分为两部分:所有偶数度顶点的度数之和(这部分肯定是偶数),加上所有奇数度顶点的度数之和。
总和(偶) = 偶数度之和(偶) + 奇数度之和( ? )
为了使等式成立,奇数度顶点的度数之和也必须是偶数。
而"奇数 + 奇数 = 偶数"。要想让一堆奇数相加得到一个偶数,这堆奇数的个数必须是偶数个(例如 3+5=8 (2个),3+5+7=15 (3个),3+5+7+9=24 (4个))。
应用:这个推论是著名的"欧拉路径"问题(例如"一笔画"问题)的理论基础。
2.2、有向图的度定理
在有向图 中,存在一个类似的定理:所有顶点的"入度"之和,等于所有顶点的"出度"之和,等于图的边数 E。
∑ in-deg(v) = ∑ out-deg(v) = E
****为什么?
这也非常直观。每一条有向边 e = (u, v) 都:
- 从一个顶点
u"出发",为u的出度贡献 +1。 - 指向一个顶点
v"进入",为v的入度贡献 +1。
当你把所有顶点的"出度"加起来时,你就是在计算"总共有多少条边出发了",这等于总边数 E。
当你把所有顶点的"入度"加起来时,你就是在计算"总共有多少条边进入了",这也等于总边数 E。
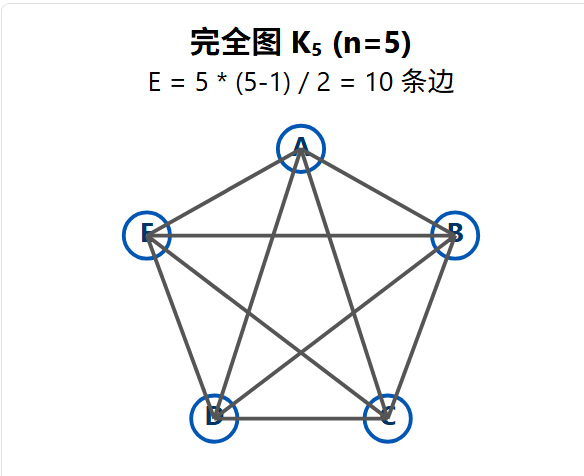
2.3、完全图
完全图(Kn)是一个简单的无向图 ,其中 任意 两个不同的顶点之间都恰好有一条边相连。
一个有 n 个顶点的完全图(Kn)有 E = n * (n - 1) / 2 条边。
为什么是 n * (n - 1) / 2?
方法一(握手定理) :在 Kn 中,每个顶点都和其它所有 (n-1) 个顶点相连。所以,每个顶点的度数都是 (n-1)。总共有 n 个顶点,所以总度数和 ∑ deg(v) = n * (n - 1)。根据握手定理,边数 E = 总度数 / 2,即 E = n * (n - 1) / 2。
方法二(组合数学) :一条边就是从 n 个顶点中"选出2个顶点"的一种组合。从 n 个元素中取 2 个的组合数 (C(n, 2)) 是多少? C(n, 2) = n! / (2! * (n-2)!) = (n * (n-1)) / 2。
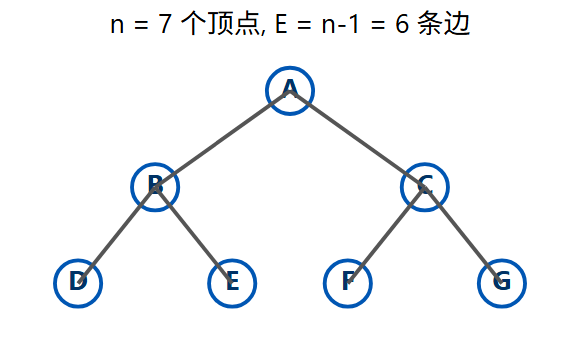
2.4、树的性质
树是一种特殊的图,它是图论中最重要的结构之一。
定义 :一个连通的 、无环的无向图。
核心性质:一个有 n 个顶点的树,必定恰好有 n-1 条边。
为什么是 n-1 条边?
你可以想象"构造"一棵树的过程:
- 从 1 个顶点开始 (n=1, E=0)。
E = n-1成立。 - 加入第 2 个顶点,并用 1 条边将它连接到第 1 个顶点 (n=2, E=1)。
E = n-1成立。 - 加入第 3 个顶点,并用 1 条边将它连接到已有的任意一个 顶点上 (n=3, E=2)。
E = n-1成立。
你每加入一个新顶点,都必须(且只能)用1 条边将它连到已有的树上。加 2 条边就会产生环,不加边它就不连通。这个过程重复 n-1 次(加入 n-1 个新顶点),所以你总共添加了 n-1 条边。
等价定义:以下任意两个条件都可以定义一个树(对于n>0的图):
- (1) 连通的
- (2) 无环的
- (3) 有 n-1 条边
任意两个条件组合,都可以推出第三个。例如:一个连通的、有 n-1 条边的图,必定无环。一个无环的、有 n-1 条边的图,必定连通。
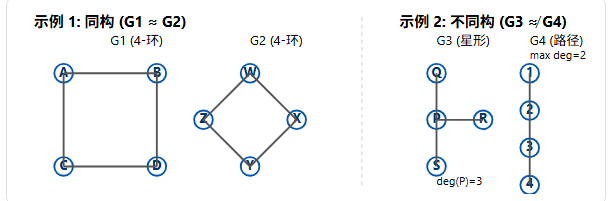
2.5、图的同构
"同构"是图论中的"全等"概念。如果两个图 G1 和 G2 结构完全相同,只是顶点(和边)的"名字"不同,或者"画法"不同,我们就称它们是同构的。
形式化定义 :G1 与 G2 同构,是指存在一个双射(一对一且全覆盖)函数 f: V(G1) → V(G2),使得 G1 中的任意两个顶点 u 和 v 之间有边,当且仅当 G2 中的 f(u) 和 f(v) 之间也有边。
如何判断? 这是一个著名的难题("图同构问题",目前没有已知的多项式时间解法)。但要证明两个图不同构,则相对容易,我们只需找到一个"结构性"的差异即可,例如:
- 顶点数量或边数量不同。
- 顶点的"度数序列"(所有顶点的度数列表)不同。
- 环的长度或数量不同。
为什么"同构"很重要?
**它关注的是"结构"而非"标签"。**在化学中,两种化合物(图)可能有不同的命名(标签),但如果它们的分子结构(图)是同构的,那么它们就是同一种物质。
在 G3 和 G4 的例子中,G3 有一个度为3的顶点 P,而 G4 所有的顶点度数都是1或2。它们的"度数序列"(G3: {3, 1, 1, 1} vs G4: {1, 2, 2, 1})不同,因此它们在结构上不可能是相同的,必定不同构。
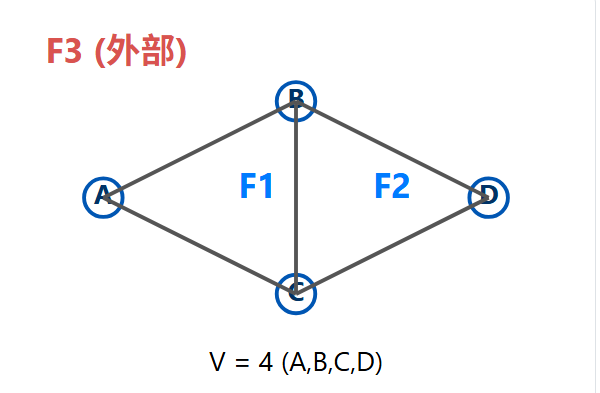
2.6、平面图和欧拉公式
平面图 :一个图,如果它可以被画在 一个平面上,且所有的边仅在顶点处相交(即边与边之间没有交叉),则称它为平面图。
欧拉公式 :对于任意一个连通的平面图,顶点数(V)、边数(E) 和 面数(F) 之间满足一个恒等式:
V - E + F = 2
- F (面, Faces) :指由边围成的区域,必须包括图外部的"无限大"区域。
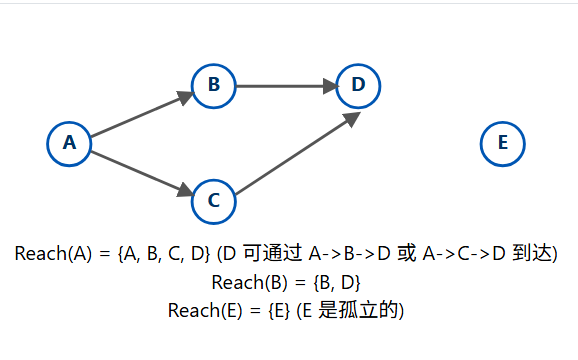
2.7、图的可达性
可达性是图论中最基本的问题之一:"从顶点 u 出发,能否到达顶点 v?"
- 定义 :如果存在一条从
u到v的路径,则称v是从u可达的。 - 自反性 :任何顶点
u总是可达自身的(路径长度为0)。 - 可达集
Reach(u):从u出发,所有可达的顶点的集合。
如何计算可达性?
图的遍历算法 (BFS 和 DFS) 就是为解决可达性问题而生的!
从顶点 u 开始执行一次 BFS 或 DFS:
- 所有被访问到的顶点 ,就是
u的可达集Reach(u)。 - 如果你想知道
v是否从u可达,只需启动遍历,看v是否在visited集合中。
可达性在有向图和无向图中引申出"连通性"的概念:
- 无向图 :如果
v从u可达,则u也必从v可达。它们在同一个"连通分量"中。 - 有向图 :如果
v从u可达,且u从v可达,则它们在同一个"强连通分量"中。
3、图的存储方式
我们画在纸上的图,计算机如何"理解"并存储呢?这至关重要,因为不同的存储方式决定了算法的效率。
主要有两种方式:邻接矩阵 和 邻接表。
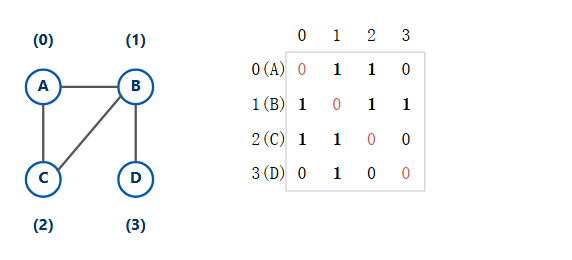
3.1、邻接矩阵
邻接矩阵使用一个 V x V 的二维数组(V 是顶点数)。我们通常需要一个映射(比如数组索引或哈希表)将顶点(如 'A')映射到矩阵的索引(如 0)。
matrix[i][j] = 1 (或权重)表示从顶点 i 到顶点 j 有一条边。 matrix[i][j] = 0 (或无穷大)表示没有边。
对于无向图 ,这个矩阵是对称 的(matrix[i][j] == matrix[j][i])因为无向图中 (i,j) 和 (j,i) 表示同一条边,所以 matrixij == matrixji,矩阵沿对角线对称。对于有向图,则不一定对称。
为什么使用矩阵?(优缺点)
优点:查询快。 它利用了数组 O(1) 的索引访问特性。想知道"A和B之间有边吗?" 只需要 1 步操作:检查 matrix[0][1] 的值。这非常快。
缺点:空间浪费。 这是它最致命的问题。你需要 V * V 的空间。想象一个有100万用户的社交网络(V=106),你需要一个 106 x 106 的矩阵,这需要 (1012) 个存储单元,是无法承受的!
为什么浪费? 因为大多数图都是稀疏图。一个用户平均可能只有300个好友,而不是100万个。这意味着矩阵中 99.9% 的元素都是 0。我们为这些 0 浪费了海量空间。
其他缺点:要查找一个顶点的所有邻居,你必须遍历一整行(或一整列),这需要 O(V) 的时间,无论它有 1 个邻居还是 V-1 个邻居。
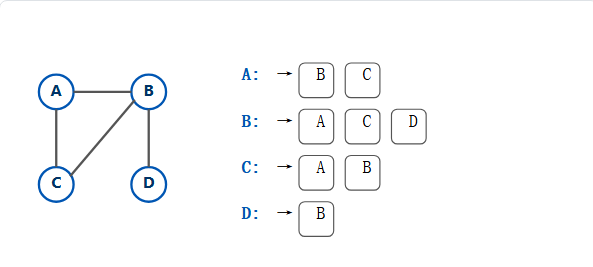
3.2、邻接表
邻接表是解决空间浪费的完美方案。它是一种"按需分配"的思想。
它使用一个 "数组(或哈希表)+ 链表(或列表)" 的结构。数组的每个索引 i 对应顶点 i,该索引处存储一个列表或链表,列表只包含 i的邻居们。
为什么邻接表是首选?(优缺点)
优点:空间高效。 它的空间复杂度是 O(V + E)(V个顶点的数组 + E个边的总数)。对于稀疏图(E 远小于 V2),这比 O(V2) 高效得多。对于100万用户、每人300好友的社交网络:
- V = 106, E ≈ 106 * 300 / 2 (无向图除以2) ≈ 1.5 x 108
- O(V + E) ≈ 106 + 1.5 x 108 ≈ 1.51 x 108
1.5亿 远小于 1012 (矩阵),完全可以接受。
其他优点:查找顶点 A 的所有邻居非常快,只需 O(deg(A)) 时间,即 A 的度。这在遍历(BFS, DFS)中效率极高。
**缺点:查询稍慢。**想知道"A和B之间有边吗?" 你不能O(1)完成了。你必须遍历 A 的邻居列表(O(deg(A)) 时间),查看 B 是否在其中。在稠密图中,这可能退化到 O(V)。
3.3、边集数组
这是最简单的存储方式,没有之一。它只关心"有哪些边"。
它使用一个 一维数组 ,数组的每个元素是一个对象(或元组),用于存储一条边。通常存储边的起点、终点和权重(如果有的话)。
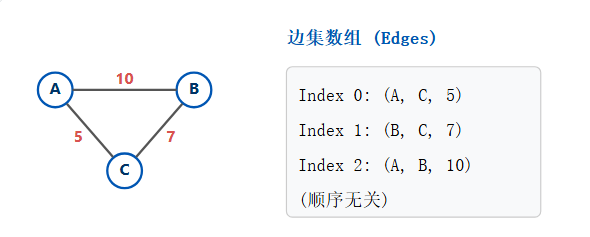
为什么使用边集数组?(优缺点)
**优点:结构简单,空间高效。**空间复杂度为 O(E)。它非常适合那些需要"遍历所有边"的算法。例如,Kruskal 算法(用于找最小生成树)的第一步就是将所有边按权重排序,使用边集数组是完美的选择。
缺点:查询邻居效率极低。 这是它的致命弱点。如果你想"查找A的所有邻居",你必须遍历整个边集数组(O(E) 时间),检查每一条边的起点或终点是否为 A。在大多数图遍历算法(BFS, DFS)中,这完全无法接受。
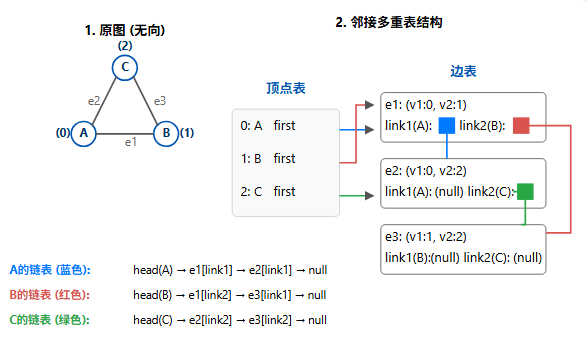
3.4、邻接多重表
这种结构主要用于无向图 ,其核心目的是方便对边的操作(例如删除边),并避免邻接表中一条边被存储两次(A的邻居有B,B的邻居有A)。
它由"顶点表"和"边表"组成:
- 顶点表 :一个数组,每个顶点占一个位置。每个顶点存储:
- 顶点的数据(如 'A')。
- 一个指向第一条依附于它 的边的指针
first_edge。
- 边表 :一个数组(或链表),每个元素代表一条边 。每个边节点存储:
- 边的两个顶点
v1,v2。 - 一个指针
link1,指向依附于v1的下一条边。 - 一个指针
link2,指向依附于v2的下一条边。
- 边的两个顶点
这就在所有边中,为每个顶点"穿"出了一条独立的链表。
为什么用邻接多重表?(优缺点)
优点:空间效率和边操作。 存储 E 条边只需要 E 个边节点,非常节省空间。最重要的是,删除一条边 (例如 e1)的操作非常高效。你只需要修改 e1 的前驱节点(这里是顶点A和B)和后继节点(e2 和 e3)的指针即可,这比在邻接表中(需要搜索两个链表)要更清晰。
**缺点:实现复杂。**这种精细的指针操作非常容易出错。而且,查找顶点的所有邻居仍然需要 O(deg(V)) 的时间(遍历它所"穿"过的链表)。因此,它只在对边操作有极高要求的特定场景下使用。
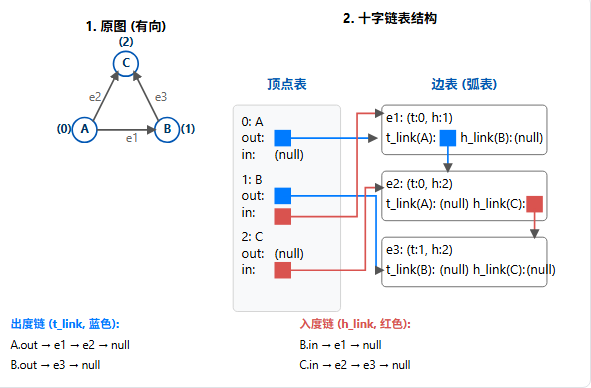
3.5、十字链表
如果说邻接多重表是为无向图优化的,那么十字链表就是为有向图优化的。
它的核心目标是:既能快速找到一个顶点的所有"出边"(出度),也能快速找到所有"入边"(入度)。 邻接表只能高效地做到前者。
它也由"顶点表"和"边表"(或称弧表)组成:
- 顶点表 :每个顶点存储:
- 顶点数据(如 'A')。
first_out:指向以它为起点的第一条出边。first_in:指向以它为终点的第一条入边。
- 边表 :每个边节点存储:
- 起点(尾)索引
tail。 - 终点(头)索引
head。 t_link(tail link):指向起点相同的下一条边。h_link(head link):指向终点相同的下一条边。
- 起点(尾)索引
这相当于为所有边建立了两个正交的链表集合:一个集合按"起点"链接,另一个集合按"终点"链接。
为什么用十字链表?(优缺点)
**优点:强大的有向图查询能力。**它是唯一一种能让你在 O(out-degree) 时间内找到所有后继(出边),并在 O(in-degree) 时间内找到所有前驱(入边)的结构。邻接表只能高效实现前者。
**缺点:极度复杂且空间开销大。**这是最复杂的图结构之一。每个顶点需要2个指针,每条边需要2个顶点索引+2个指针,空间开销是 O(V+E) 中最大的。
应用:需要频繁计算入度和出度的算法,例如拓扑排序(虽然邻接表也能做,但十字链表更直接),或者需要反向遍历图的场景。
3.6、存储对比
理解了所有存储方式后,我们如何选择?这取决于你的"数据特性"和"操作需求"。
| 存储方式 | 空间复杂度 | 检查边(u,v) | 找v的邻居(出) | 找v的邻居(入) | 实现 |
|---|---|---|---|---|---|
| 邻接矩阵 | O(V2) | O(1) | O(V) | O(V) (查列) | 简单 |
| 邻接表 | O(V+E) | O(deg(u)) | O(deg(u)) | O(V+E) (慢) | 中等 (Python简单) |
| 边集数组 | O(E) | O(E) (极慢) | O(E) (极慢) | O(E) (极慢) | 非常简单 |
| 邻接多重表 | O(V+E) | O(E) (慢) | O(deg(v)) | O(deg(v)) (无向) | 复杂 |
| 十字链表 | O(V+E) | O(deg(u)) (慢) | O(out-deg(v)) | O(in-deg(v)) | 非常复杂 |
如何选择?------ 决策指南
- 99% 的情况:使用邻接表
为什么? 现实世界的图几乎都是稀疏图 (E 远小于 V2)。邻接表的空间复杂度 O(V+E) 是最优的,并且它能以 O(deg(v)) 的高效时间找到所有邻居,这正是 BFS 和 DFS 遍历算法所需要的。在 Python 中用字典实现也非常简单。
- 当你的图是稠密图时:使用邻接矩阵
为什么? 如果 E 已经接近 V2,那么 O(V+E) 和 O(V2) 差别不大了。此时,邻接矩阵 O(1) 的"检查边"速度就成了巨大优势。某些算法(如 Floyd-Warshall 多源最短路径)的动态规划依赖于这种 O(1) 查询,用邻接矩阵实现最合适。
- 当你只关心"所有边"时:使用边集数组
为什么? 如果你的算法不需要查找特定顶点的邻居,而是要对"所有边"进行操作(例如,按权重排序),那么边集数组是最简单、最高效的。Kruskal 算法是典型例子。
- 当你需要频繁操作有向图的"入度"时:使用十字链表
为什么? 邻接表找"出边"很快 (adj_list[v]),但找"入边"(谁指向v?)需要遍历整个图 (O(V+E))。如果你的应用需要频繁查询入边(例如,高效实现拓扑排序或反向遍历图),十字链表是唯一高效的结构。
- 当你的无向图需要频繁"删边"时:使用邻接多重表
为什么? 在邻接表中删除一条边 (u, v) 很麻烦,你得去 u 的列表里删 v,还得去 v 的列表里删 u。在邻接多重表中,边是独立对象,删除它只需 O(1) 的指针操作(前提是已拿到该边对象),逻辑更清晰。
4、图的遍历
"遍历"是指系统地访问图中的每一个顶点。这是所有图算法的基础。最核心的两种遍历方式是:广度优先搜索 (BFS) 和 深度优先搜索 (DFS)。
图遍历就像是你在一个陌生的城市(图)中,有了一张地图(邻接表),你需要一个策略来确保你"不重不漏"地访问每一个路口(顶点)。
遍历是"提问"的基础:
- "从A点出发能到达B点吗?" (可达性)
- "从A点到B点,最少需要经过几个路口?" (最短路径)
- "这个城市有环路吗?" (环检测)
- "这个城市被分成了几个互不相通的区域?" (连通分量)
所有这些问题的答案,都始于一次"聪明的"遍历。
4.1、广度优先搜索
BFS 的策略是"逐层"或"水波纹式"地向外探索。它从一个起始节点开始,访问它所有的直接邻居,然后再访问这些邻居的邻居,以此类推。
核心数据结构:队列 (Queue) (先进先出, FIFO)
算法思想:
- 将起始节点放入一个队列,并标记为"已访问"。
- 当队列不为空时:
- 从队列头部取出一个节点
u。 - 处理
u(例如打印它)。 - 遍历
u的所有邻居v:- 如果
v从未被访问过: - 将其标记为"已访问"。
- 将其放入队列尾部。
- 如果
- 从队列头部取出一个节点
BFS还有一个重要的特性:能找到无权图的最短路径
因为 BFS 是"逐层"推进的。它首先访问所有距离为 1 的节点,然后才访问所有距离为 2 的节点,接着是距离为 3 的节点...
当你从 A 出发,通过 BFS 第一次"发现"B 时,你所走的路径一定是 A 到 B 的最短路径。**为什么?**因为如果存在一条更短的路径(比如少一个节点),BFS 的"逐层"特性决定了它"必定"会先通过那条更短的路径发现 B。这构成了一个反证法。
应用:地图导航中查找"最少换乘"的地铁路线(每条边=1)。
4.2、深度优先搜索
DFS 的策略是"一条路走到黑"。它从一个起始节点开始,选择一个邻居,然后"深入"到该邻居的邻居...直到到达一个"死胡同"(没有未访问的邻居),然后"回溯"到上一个节点,尝试另一条路。
核心数据结构:栈 (Stack) (后进先出, LIFO) 或 递归 (系统调用栈)
算法思想 (递归版 - 更直观):
- 创建一个"已访问"集合
visited。 - 定义一个函数
dfs_visit(u):- 将
u标记为"已访问"。 - 处理
u(例如打印它)。 - 遍历
u的所有邻居v:- 如果
v从未被访问过: - 递归调用
dfs_visit(v)。
- 如果
- 将
- 从起始节点
s开始调用dfs_visit(s)。
DFS 的"深入"特性,它能帮你维护一条"当前路径",非常适合环检测和拓扑排序。
环检测 :当你从 u 访问 v 时,如果 v 已经被访问过了,你需要问一个问题:v 是一个已经"完成探索并回溯"的节点,还是一个"正在探索中"(即 v 是 u 的祖先)的节点?如果是后者,你就找到了一个环!
拓扑排序 :(针对有向无环图 DAG) DFS 能告诉你"谁先谁后"。当你"完成"一个节点 u 的探索(即它的所有子孙都已被访问)并回溯时,u 一定是在它所有子孙"之后"的。你把这个完成的顺序反转,就是拓扑序。
应用:任务调度(必须先编译A,才能编译B)、课程先修(必须先上C101,才能上C102)。
4.3、两种遍历方式对比
BFS 和 DFS 是图遍历的两种最核心的策略。它们都能访问到所有可达顶点,但访问的顺序和应用的场景截然不同。
| 特性 | BFS (广度优先搜索) | DFS (深度优先搜索) |
|---|---|---|
| 核心数据结构 | 队列 (Queue) - FIFO (先进先出) | 栈 (Stack) - LIFO (后进先出) (或使用递归) |
| 访问顺序 | 逐层访问。像水波纹一样,从起点开始,先访问完所有距离为 1 的邻居,再访问所有距离为 2 的邻居... | 一条路走到黑。从起点出发,选择一个邻居,然后从该邻居出发继续深入,直到无法再前进,才回溯。 |
| 形状 | "胖"而"矮"。它会尽可能地横向扩展。 | "瘦"而"高"。它会尽可能地纵向深入。 |
| 空间复杂度 | O(V)。最坏情况(如星形图)下,队列可能需要存储所有 V-1 个邻居。 | O(V) (递归栈/显式栈)。最坏情况(如链表图)下,栈的深度可能达到 V。 |
| 找到的路径 | 保证找到最短路径 (在无权图中)。 | 不保证找到最短路径。找到的路径取决于探索的顺序。 |
| 适用场景 | + 无权图最短路径 (如:导航) + 社交网络中"N度好友" + 爬虫(逐层爬取) | + 寻找路径(任意路径即可) + 拓扑排序 + 寻找连通分量 / 强连通分量 + 检测环 |
4.4、可视化演示
https://code.juejin.cn/pen/7569070221370064934?embed=true
5、Python实现
python
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
from collections import deque
from typing import List, Dict, Set, Optional, Tuple
class GraphMatrix:
"""使用邻接矩阵存储图"""
def __init__(self, num_vertices: int, directed: bool = False):
"""
初始化图
:param num_vertices: 顶点数量
:param directed: 是否为有向图
"""
self.num_vertices = num_vertices
self.directed = directed
# 初始化邻接矩阵,0表示无边,非0表示权重
self.matrix = [[0] * num_vertices for _ in range(num_vertices)]
def add_edge(self, src: int, dest: int, weight: int = 1):
"""添加边"""
if 0 <= src < self.num_vertices and 0 <= dest < self.num_vertices:
self.matrix[src][dest] = weight
if not self.directed:
self.matrix[dest][src] = weight
else:
raise ValueError("顶点索引超出范围")
def remove_edge(self, src: int, dest: int):
"""删除边"""
if 0 <= src < self.num_vertices and 0 <= dest < self.num_vertices:
self.matrix[src][dest] = 0
if not self.directed:
self.matrix[dest][src] = 0
def has_edge(self, src: int, dest: int) -> bool:
"""判断是否存在边"""
return self.matrix[src][dest] != 0
def get_neighbors(self, vertex: int) -> List[int]:
"""获取某顶点的所有邻居"""
neighbors = []
for i in range(self.num_vertices):
if self.matrix[vertex][i] != 0:
neighbors.append(i)
return neighbors
def print_graph(self):
"""打印邻接矩阵"""
print("\n邻接矩阵表示:")
print(" ", end="")
for i in range(self.num_vertices):
print(f"{i:3}", end="")
print()
for i in range(self.num_vertices):
print(f"{i:3}", end="")
for j in range(self.num_vertices):
print(f"{self.matrix[i][j]:3}", end="")
print()
class GraphList:
"""使用邻接表存储图"""
def __init__(self, directed: bool = False):
"""
初始化图
:param directed: 是否为有向图
"""
self.graph = {} # 字典存储邻接表
self.directed = directed
def add_vertex(self, vertex):
"""添加顶点"""
if vertex not in self.graph:
self.graph[vertex] = []
def add_edge(self, src, dest, weight: int = 1):
"""添加边(可以是加权的)"""
# 确保顶点存在
self.add_vertex(src)
self.add_vertex(dest)
# 添加边(存储为 (目标顶点, 权重) 元组)
self.graph[src].append((dest, weight))
if not self.directed:
self.graph[dest].append((src, weight))
def remove_edge(self, src, dest):
"""删除边"""
if src in self.graph:
self.graph[src] = [(v, w) for v, w in self.graph[src] if v != dest]
if not self.directed and dest in self.graph:
self.graph[dest] = [(v, w) for v, w in self.graph[dest] if v != src]
def has_edge(self, src, dest) -> bool:
"""判断是否存在边"""
if src not in self.graph:
return False
return any(neighbor == dest for neighbor, _ in self.graph[src])
def get_neighbors(self, vertex) -> List:
"""获取某顶点的所有邻居"""
return [neighbor for neighbor, _ in self.graph.get(vertex, [])]
def get_neighbors_with_weight(self, vertex) -> List[Tuple]:
"""获取某顶点的所有邻居及权重"""
return self.graph.get(vertex, [])
def print_graph(self):
"""打印邻接表"""
print("\n邻接表表示:")
for vertex in sorted(self.graph.keys()):
neighbors = self.graph[vertex]
print(f"{vertex} -> {neighbors}")
class EdgeNode:
"""边节点"""
def __init__(self, src, dest, weight: int = 1):
self.src = src # 起点
self.dest = dest # 终点
self.weight = weight # 权重
def __repr__(self):
return f"({self.src}->{self.dest}, w={self.weight})"
class GraphEdgeSet:
"""使用边集表存储图"""
def __init__(self, directed: bool = False):
"""
初始化图
:param directed: 是否为有向图
"""
self.edges = [] # 边的列表
self.vertices = set() # 顶点集合
self.directed = directed
def add_vertex(self, vertex):
"""添加顶点"""
self.vertices.add(vertex)
def add_edge(self, src, dest, weight: int = 1):
"""添加边"""
self.vertices.add(src)
self.vertices.add(dest)
edge = EdgeNode(src, dest, weight)
self.edges.append(edge)
if not self.directed:
# 无向图需要添加反向边
reverse_edge = EdgeNode(dest, src, weight)
self.edges.append(reverse_edge)
def remove_edge(self, src, dest):
"""删除边"""
self.edges = [e for e in self.edges if not (e.src == src and e.dest == dest)]
if not self.directed:
self.edges = [e for e in self.edges if not (e.src == dest and e.dest == src)]
def has_edge(self, src, dest) -> bool:
"""判断是否存在边"""
return any(e.src == src and e.dest == dest for e in self.edges)
def get_neighbors(self, vertex) -> List:
"""获取某顶点的所有邻居"""
return [e.dest for e in self.edges if e.src == vertex]
def print_graph(self):
"""打印边集表"""
print("\n边集表表示:")
print(f"顶点集: {sorted(self.vertices)}")
print("边集:")
for edge in self.edges:
print(f" {edge}")
class EdgeBoxNode:
"""邻接多重表的边盒子节点"""
def __init__(self, i_vertex, j_vertex, weight: int = 1):
self.mark = False # 访问标记
self.i_vertex = i_vertex # 边的一个顶点
self.j_vertex = j_vertex # 边的另一个顶点
self.weight = weight # 权重
self.i_link = None # 指向下一条依附于i_vertex的边
self.j_link = None # 指向下一条依附于j_vertex的边
def __repr__(self):
return f"Edge({self.i_vertex}<->{self.j_vertex}, w={self.weight})"
class VertexBoxNode:
"""邻接多重表的顶点盒子节点"""
def __init__(self, data):
self.data = data # 顶点数据
self.first_edge = None # 指向第一条依附于该顶点的边
class GraphAdjacencyMultiList:
"""邻接多重表(专用于无向图)"""
def __init__(self):
"""初始化图"""
self.vertices = {} # 顶点字典 {vertex_data: VertexBoxNode}
def add_vertex(self, vertex):
"""添加顶点"""
if vertex not in self.vertices:
self.vertices[vertex] = VertexBoxNode(vertex)
def add_edge(self, src, dest, weight: int = 1):
"""添加边"""
# 确保顶点存在
self.add_vertex(src)
self.add_vertex(dest)
# 创建边节点
edge = EdgeBoxNode(src, dest, weight)
# 将边插入到src的边链表头部
edge.i_link = self.vertices[src].first_edge
self.vertices[src].first_edge = edge
# 将边插入到dest的边链表头部
edge.j_link = self.vertices[dest].first_edge
self.vertices[dest].first_edge = edge
def get_neighbors(self, vertex) -> List:
"""获取某顶点的所有邻居"""
if vertex not in self.vertices:
return []
neighbors = []
edge = self.vertices[vertex].first_edge
while edge is not None:
# 判断当前边的另一端是哪个顶点
if edge.i_vertex == vertex:
neighbors.append(edge.j_vertex)
edge = edge.i_link
else:
neighbors.append(edge.i_vertex)
edge = edge.j_link
return neighbors
def print_graph(self):
"""打印邻接多重表"""
print("\n邻接多重表表示(无向图):")
for vertex_data in sorted(self.vertices.keys()):
vertex_node = self.vertices[vertex_data]
edges = []
edge = vertex_node.first_edge
while edge is not None:
if edge.i_vertex == vertex_data:
edges.append(f"{edge.j_vertex}(w={edge.weight})")
edge = edge.i_link
else:
edges.append(f"{edge.i_vertex}(w={edge.weight})")
edge = edge.j_link
print(f"{vertex_data} -> {edges}")
class ArcBoxNode:
"""十字链表的弧盒子节点"""
def __init__(self, tail_vertex, head_vertex, weight: int = 1):
self.tail_vertex = tail_vertex # 弧尾(起点)
self.head_vertex = head_vertex # 弧头(终点)
self.weight = weight # 权重
self.head_link = None # 指向弧头相同的下一条弧
self.tail_link = None # 指向弧尾相同的下一条弧
def __repr__(self):
return f"Arc({self.tail_vertex}->{self.head_vertex}, w={self.weight})"
class VertexCrossNode:
"""十字链表的顶点节点"""
def __init__(self, data):
self.data = data # 顶点数据
self.first_in = None # 指向第一条入弧
self.first_out = None # 指向第一条出弧
class GraphOrthogonalList:
"""十字链表(专用于有向图)"""
def __init__(self):
"""初始化图"""
self.vertices = {} # 顶点字典 {vertex_data: VertexCrossNode}
def add_vertex(self, vertex):
"""添加顶点"""
if vertex not in self.vertices:
self.vertices[vertex] = VertexCrossNode(vertex)
def add_edge(self, src, dest, weight: int = 1):
"""添加边"""
# 确保顶点存在
self.add_vertex(src)
self.add_vertex(dest)
# 创建弧节点
arc = ArcBoxNode(src, dest, weight)
# 将弧插入到src的出弧链表头部
arc.tail_link = self.vertices[src].first_out
self.vertices[src].first_out = arc
# 将弧插入到dest的入弧链表头部
arc.head_link = self.vertices[dest].first_in
self.vertices[dest].first_in = arc
def get_out_neighbors(self, vertex) -> List:
"""获取某顶点的所有出邻居(后继)"""
if vertex not in self.vertices:
return []
neighbors = []
arc = self.vertices[vertex].first_out
while arc is not None:
neighbors.append(arc.head_vertex)
arc = arc.tail_link
return neighbors
def get_in_neighbors(self, vertex) -> List:
"""获取某顶点的所有入邻居(前驱)"""
if vertex not in self.vertices:
return []
neighbors = []
arc = self.vertices[vertex].first_in
while arc is not None:
neighbors.append(arc.tail_vertex)
arc = arc.head_link
return neighbors
def print_graph(self):
"""打印十字链表"""
print("\n十字链表表示(有向图):")
for vertex_data in sorted(self.vertices.keys()):
vertex_node = self.vertices[vertex_data]
# 打印出弧
out_arcs = []
arc = vertex_node.first_out
while arc is not None:
out_arcs.append(f"{arc.head_vertex}(w={arc.weight})")
arc = arc.tail_link
# 打印入弧
in_arcs = []
arc = vertex_node.first_in
while arc is not None:
in_arcs.append(f"{arc.tail_vertex}(w={arc.weight})")
arc = arc.head_link
print(f"{vertex_data}:")
print(f" 出弧: {out_arcs}")
print(f" 入弧: {in_arcs}")
class GraphTraversal:
"""图的遍历算法(基于邻接表)"""
@staticmethod
def dfs_recursive(graph: GraphList, start, visited: Set = None) -> List:
"""
深度优先搜索 - 递归实现
:param graph: 图对象(邻接表)
:param start: 起始顶点
:param visited: 已访问顶点集合
:return: 遍历顺序列表
"""
if visited is None:
visited = set()
result = []
def dfs(vertex):
visited.add(vertex)
result.append(vertex)
print(f"访问节点: {vertex}")
# 递归访问所有未访问的邻居
for neighbor, _ in graph.graph.get(vertex, []):
if neighbor not in visited:
dfs(neighbor)
dfs(start)
return result
@staticmethod
def dfs_iterative(graph: GraphList, start) -> List:
"""
深度优先搜索 - 迭代实现(使用栈)
:param graph: 图对象(邻接表)
:param start: 起始顶点
:return: 遍历顺序列表
"""
visited = set()
stack = [start]
result = []
while stack:
vertex = stack.pop()
if vertex not in visited:
visited.add(vertex)
result.append(vertex)
print(f"访问节点: {vertex}")
# 将所有未访问的邻居压入栈
neighbors = [n for n, _ in graph.graph.get(vertex, [])]
for neighbor in reversed(neighbors): # 反转以保持顺序
if neighbor not in visited:
stack.append(neighbor)
return result
@staticmethod
def bfs(graph: GraphList, start) -> List:
"""
广度优先搜索(使用队列)
:param graph: 图对象(邻接表)
:param start: 起始顶点
:return: 遍历顺序列表
"""
visited = set()
queue = deque([start])
visited.add(start)
result = []
while queue:
vertex = queue.popleft()
result.append(vertex)
print(f"访问节点: {vertex}")
# 将所有未访问的邻居加入队列
for neighbor, _ in graph.graph.get(vertex, []):
if neighbor not in visited:
visited.add(neighbor)
queue.append(neighbor)
return result
@staticmethod
def dfs_all_paths(graph: GraphList, start, end) -> List[List]:
"""
找出从start到end的所有路径(DFS应用)
:param graph: 图对象
:param start: 起始顶点
:param end: 目标顶点
:return: 所有路径的列表
"""
all_paths = []
def dfs(current, target, path, visited):
if current == target:
all_paths.append(path.copy())
return
visited.add(current)
for neighbor, _ in graph.graph.get(current, []):
if neighbor not in visited:
path.append(neighbor)
dfs(neighbor, target, path, visited)
path.pop()
visited.remove(current)
dfs(start, end, [start], set())
return all_paths
@staticmethod
def bfs_shortest_path(graph: GraphList, start, end) -> Optional[List]:
"""
使用BFS找最短路径(无权图)
:param graph: 图对象
:param start: 起始顶点
:param end: 目标顶点
:return: 最短路径,如果不存在则返回None
"""
if start == end:
return [start]
visited = {start}
queue = deque([(start, [start])])
while queue:
vertex, path = queue.popleft()
for neighbor, _ in graph.graph.get(vertex, []):
if neighbor not in visited:
new_path = path + [neighbor]
if neighbor == end:
return new_path
visited.add(neighbor)
queue.append((neighbor, new_path))
return None
def test_graph_implementations():
"""测试所有图的实现"""
print("=" * 60)
print("测试1: 邻接矩阵 - 无向图")
print("=" * 60)
g1 = GraphMatrix(4, directed=False)
g1.add_edge(0, 1, 1)
g1.add_edge(0, 2, 1)
g1.add_edge(1, 3, 1)
g1.add_edge(2, 3, 1)
g1.print_graph()
print(f"顶点0的邻居: {g1.get_neighbors(0)}")
print(f"是否存在边(0,1): {g1.has_edge(0, 1)}")
print("\n" + "=" * 60)
print("测试2: 邻接表 - 无向图")
print("=" * 60)
g2 = GraphList(directed=False)
g2.add_edge('A', 'B', 5)
g2.add_edge('A', 'C', 3)
g2.add_edge('B', 'D', 2)
g2.add_edge('C', 'D', 4)
g2.print_graph()
print(f"顶点A的邻居: {g2.get_neighbors('A')}")
print(f"顶点A的邻居(含权重): {g2.get_neighbors_with_weight('A')}")
print("\n" + "=" * 60)
print("测试3: 边集表 - 无向图")
print("=" * 60)
g3 = GraphEdgeSet(directed=False)
g3.add_edge('X', 'Y', 10)
g3.add_edge('Y', 'Z', 20)
g3.add_edge('X', 'Z', 15)
g3.print_graph()
print("\n" + "=" * 60)
print("测试4: 邻接多重表 - 无向图")
print("=" * 60)
g4 = GraphAdjacencyMultiList()
g4.add_edge('A', 'B', 1)
g4.add_edge('A', 'C', 2)
g4.add_edge('B', 'C', 3)
g4.add_edge('B', 'D', 4)
g4.print_graph()
print("\n" + "=" * 60)
print("测试5: 十字链表 - 有向图")
print("=" * 60)
g5 = GraphOrthogonalList()
g5.add_edge('A', 'B', 1)
g5.add_edge('A', 'C', 2)
g5.add_edge('B', 'C', 3)
g5.add_edge('C', 'D', 4)
g5.add_edge('D', 'A', 5)
g5.print_graph()
print("\n" + "=" * 60)
print("测试6: DFS遍历 - 递归")
print("=" * 60)
g_traverse = GraphList(directed=False)
g_traverse.add_edge('A', 'B')
g_traverse.add_edge('A', 'C')
g_traverse.add_edge('B', 'D')
g_traverse.add_edge('B', 'E')
g_traverse.add_edge('C', 'F')
g_traverse.add_edge('E', 'F')
result = GraphTraversal.dfs_recursive(g_traverse, 'A')
print(f"DFS遍历结果: {result}")
print("\n" + "=" * 60)
print("测试7: DFS遍历 - 迭代")
print("=" * 60)
result = GraphTraversal.dfs_iterative(g_traverse, 'A')
print(f"DFS遍历结果: {result}")
print("\n" + "=" * 60)
print("测试8: BFS遍历")
print("=" * 60)
result = GraphTraversal.bfs(g_traverse, 'A')
print(f"BFS遍历结果: {result}")
print("\n" + "=" * 60)
print("测试9: 查找所有路径(DFS应用)")
print("=" * 60)
paths = GraphTraversal.dfs_all_paths(g_traverse, 'A', 'F')
print(f"从A到F的所有路径:")
for i, path in enumerate(paths, 1):
print(f" 路径{i}: {' -> '.join(path)}")
print("\n" + "=" * 60)
print("测试10: 查找最短路径(BFS应用)")
print("=" * 60)
shortest = GraphTraversal.bfs_shortest_path(g_traverse, 'A', 'F')
if shortest:
print(f"从A到F的最短路径: {' -> '.join(shortest)}")
else:
print("未找到路径")
if __name__ == "__main__":
test_graph_implementations()
# ============================================================
# 测试6: DFS遍历 - 递归
# ============================================================
# 访问节点: A
# 访问节点: B
# 访问节点: D
# 访问节点: E
# 访问节点: F
# 访问节点: C
# DFS遍历结果: ['A', 'B', 'D', 'E', 'F', 'C']
# ============================================================
# 测试7: DFS遍历 - 迭代
# ============================================================
# 访问节点: A
# 访问节点: B
# 访问节点: D
# 访问节点: E
# 访问节点: F
# 访问节点: C
# DFS遍历结果: ['A', 'B', 'D', 'E', 'F', 'C']
# ============================================================
# 测试8: BFS遍历
# ============================================================
# 访问节点: A
# 访问节点: B
# 访问节点: C
# 访问节点: D
# 访问节点: E
# 访问节点: F
# BFS遍历结果: ['A', 'B', 'C', 'D', 'E', 'F']
# ============================================================
# 测试9: 查找所有路径(DFS应用)
# ============================================================
# 从A到F的所有路径:
# 路径1: A -> B -> E -> F
# 路径2: A -> C -> F
# ============================================================
# 测试10: 查找最短路径(BFS应用)
# ============================================================
# 从A到F的最短路径: A -> C -> F6、总结
- 图是什么? -
G = (V, E),一种表示"关系"的通用抽象模型。 - 如何描述图? - 有向/无向,带权/无权。
- 如何存储图? - 邻接矩阵 (查询快, O(1),空间 O(V2),适合稠密图) 和 邻接表 (空间省, O(V+E),查询稍慢 O(deg),适合稀疏图,是首选!)。
- 如何遍历图?
- BFS (广度优先) :使用队列 ,逐层探索,能找到无权图最短路径。
- DFS (深度优先) :使用栈或递归 ,一条路走到底,适合检测环、拓扑排序。