1 基础概念
1.1 傅里叶级数
1 周期函数
若函数f(x)满足:存在非零常数T,对任意x有f(x+T) = f(x) ,则称f(x) 为周期函数,T为其周期;最小正周期称为基本周期 (记为T0)。傅里叶级数中,最常用以2π为周期的函数(T=2π),其他周期的函数可通过变量替换转化为2π周期,因此核心研究2π周期函数。
2 三角函数系的正交性
傅里叶级数的本质是在三角函数系中对周期函数做正交分解,类似平面向量在x、y轴上的分解,三角函数系就是周期函数空间的一组正交基。
(1)标准正交三角函数系(2π周期)
{1,cosx ,sinx, cos2x ,sin2x ,...,cosnx ,sinnx,...}
其中n为正整数,1可以看作cos0x。
(2)正交性的定义
对上述三角函数系中任意两个不同的函数φm(x)和φn(x),满足:

对同一个函数,积分结果非零:
(3)核心正交积分公式
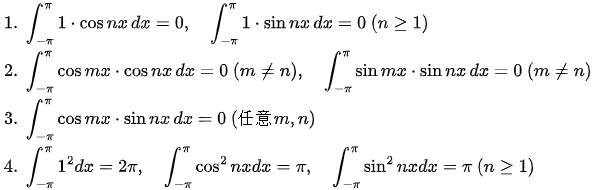
正交性的意义:三角函数系中的各个基函数"互不干扰",分解后的每个正余弦项的系数可独立计算,这是傅里叶级数能求解的关键。
3 傅里叶级数
法国数学家傅里叶认为,任何周期函数都可以用正弦函数和余弦函数构成的无穷级数来表示(选择正弦函数与余弦函数作为基函数是因为它们是正交的),后世称傅里叶级数为一种特殊的三角级数,根据欧拉公式,三角函数又能化成指数形式,也称傅立叶级数为一种指数级数。在数学中,三角级数是任何具有下述形式的级数:

当An和Bn具有以下形式时,该级数称为傅立叶级数:
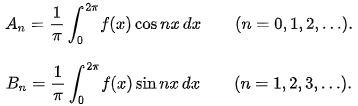
其中f(x)是可积函数。下面给出2π周期函数的傅里叶级数定义:
设f(x)是以2π为周期的函数,且在-π, π上可积,则其傅里叶级数为:

符号说明:
~:表示"展开为傅里叶级数",而非严格相等(需满足收敛条件才相等);
a0/2:直流分量/零频项,是函数f(x)在一个周期内的平均值;
ancosnx:余弦项/偶次谐波,对应周期函数的偶函数分量;
bnsinnx:正弦项/奇次谐波,对应周期函数的奇函数分量;
a0, an, bn:傅里叶系数,是唯一确定的常数,有f(x)决定。
1.2 傅里叶变换
1 欧拉公式(Euler's formula)

其中:e是自然常数,约等于2.71828,i是虚数单位满足i2=-1,θ是复指数的辐角∈R,对应复平面上的旋转角度。对于该公式当θ=π时,有eiπ + 1 = 0,这个公式在傅里叶变换中起到关键作用。
2 傅里叶变换(Fourier Transform, FT)
傅里叶变换是将时域的连续函数映射到频域连续函数的数学变换,是调和分析的核心工具,揭示了"任意连续周期/非周期函数均可分解为不同频率的正弦/余弦函数叠加"的本质。现给出连续傅里叶变换(Continuous Fourier Transform, CFT)相关定义,适用于定义域为全体实数R、满足狄利克雷条件(Dirichlet)的连续函数f(t),其中t为时域自变量(通常表示时间),变换后得到频域函数F(ω),ω为角频率(rad/s)。
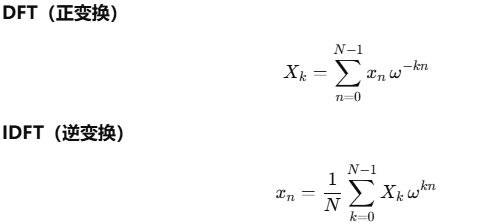
(1)正变换(时域→频域)
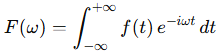
积分区间(−∞,+∞)对应非周期函数的时域是无限的,需对全体实数域积分,变换本质是:用所有频率的复指数函数作为"基函数",对f(t)做投影。
(2)逆变换(频域→时域)
傅里叶变换是可逆变换,从频域函数F(ω)还原时域f(t)的公式为:
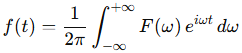
关键系数1/2π:该系数是为了满足"正逆变换的归一性",也有教材将系数拆分为1/sqrt(2π)分别放在正、逆变换中(数学上更对称),两种形式等价。
3 离散傅里叶变换(Discrete Fourier Transform,DFT)
DFT是一种线性变换,把一个有限长的离散序列,从"时间/系数域"变换到"频率/点值域"。其数学定义为给定长度为n的复数序列:x=(x0, x1, ..., xn-1) ,令:ω = e-2πi/n,定义其离散傅里叶变换(DFT)为序列:
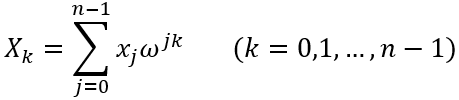
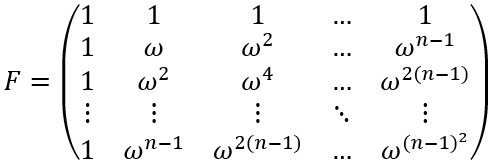
xj 是输入序列(时域信号),Xk 是输出序列(频域信号),通过将时域信号与一系列不同频率的复指数函数进行内积,得到每个频率分量在原始信号中的"含量"。DFT是一个线性变换,本质是X = F*x ,其中F是一个范德蒙德(Vandermonde)矩阵,即从线性代数角度看:DFT = Vandermonde变换。从矩阵运算可以看出,要得到每个频率分量,需要进行n次乘法和n-1次加法运算,完成整个变换需要n2次乘法和n(n-1)次加法运算,所以完整变换的复杂度是O(n2),当序列长度n较大时,计算量会变得极其庞大,限制了DFT在实际应用中的效率。
以多项式A(x)=a0+a1x+a2x2+...+an-1xn-1 为例,则上述离散序列可以看作是多项式系数表示法(coefficient form)中的系数,即x = a = (a0, a1, ..., an-1) ,选择特殊的"点"------n次单位根:ω = e2πi/n,它满足:

以n=11为例,图中所有*ωi*都是11次单位根:
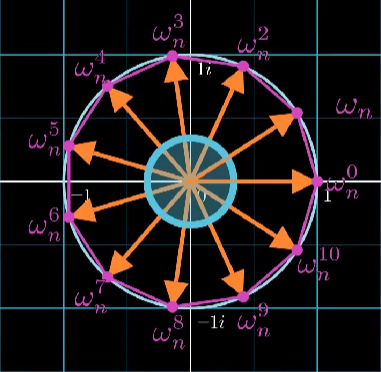
考虑n个互不相同的点:1, ω, ω2, ..., ωn-1 ,将其代入*A(x)*多项式,则有:
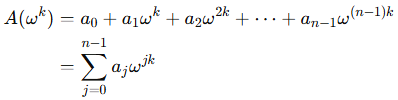
可见Xk = A(ω-k),即DFT的计算结果,恰好等价于在单位根上的多项式求值(对应多项式的点值表示法)。
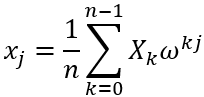
逆离散傅里叶变换(IDFT)由以下公式给出:
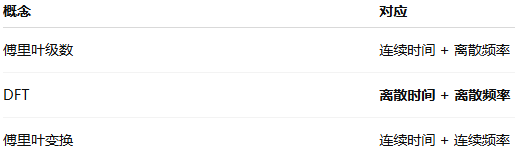
傅里叶级数、傅里叶变换和DFT区别由下表给出:
4 快速傅里叶变换(Fast Fourier Transform,FFT)
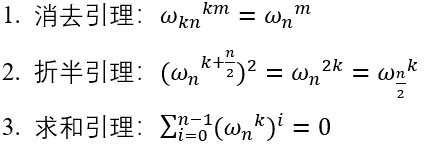
1965年,J.W.库利和T.W.图基提出了著名的Cooley-Tukey算法,即快速傅里叶变换(FFT)。FFT算法的核心是利用旋转因子的周期性、对称性和可约性,将长序列的DFT分解为短序列的DFT,从而大幅减少计算量。首先给出单位根的三个引理:
一句话概括FFT:利用n次单位根的周期性与对称性,把一个规模为n的DFT,拆成两个规模为N/2的DFT。在经典FFT算法(Cooley-Tukey算法)中假设n=2m,把序列拆成"偶数项+奇数项":
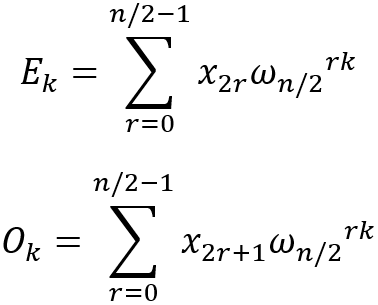
则可以将DFT拆开:

利用折半引理可将上式简化为:

其中:
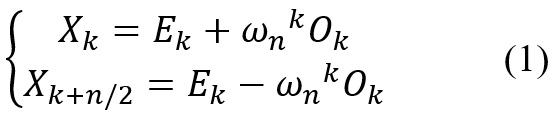
以上将1个包含n次乘法的DFT分成两个n/2次乘法的DFT,另外由ωnn/2+k = -ωnk可以进一步得到迭代公式(1):
以上就是所谓的蝶形运算(butterfly),一次算出两个输出。可见一个长度为n的DFT被拆成两个长度是n/2的DFT和n/2次蝶形合并,所以时间复杂度为:

这里2T(n/2) 表示:要解决一个规模为n 的问题,需要"调用两次"规模为n/2 的同类问题,每一次的代价是T(n/2) ;cn表示:当前这一层,为了把两个子FFT的结果"合并"所做的计算量。一个标准的radix-2蝶形:
需要:1次复数乘法ωb和2次复数加减法,都是常数级操作可记为O(1),对于长度为n的FFT每一层有n/2个蝶形,所以每层蝶形计算量是n/2xO(1)=O(n),可以记为cn,这里的c就是一个蝶形需要多少个"基础运算"的常数因子。所以随着层数递增有以下时间复杂度推导:
递归终止条件是当:n/2k=1 ,这时k=log2n ,上述推导最终结果为:T(n)=n*T(1)+cnlog2n ,忽略常数得最终复杂度公式T(n)=O(nlog2n)。
以上给出了快速傅里叶变换,快速傅里叶逆变换(IFFT,Inverse FFT)定义及分析过程与正变换类似,为了公式简洁正变换分析过程取ω = e-2πi/n ,实际上在严格的数学定义中一般取ω = e2πi/n(正向单位根),此时正变换和逆变换定义如下:
正变换用于拆解信号,获取在正交基上的投影,逆变换用于合成信号,完成正交基投影的叠加。
1.3 NTT(Number Theoretic Transform)
NTT = 在有限域/模整数环中进行的FFT,即NTT是把FFT中的"复数单位根"换成了"模意义下的单位根",结构完全一致,只是"数域"不同。FFT主要存在3方面问题:用的是复数、有浮点误差、在密码学/大整数/精确多项式运算中不可接受,而NTT正好可以解决这些问题。NTT工作空间是有限域,通常选F*p* ,p 是素数,所有运算都基于mod p,在NTT中,需要找ω(模p下的n次原始单位根),它满足:

设模数p,n|(p-1),ω是n次原始单位根,NTT相关定义如下:
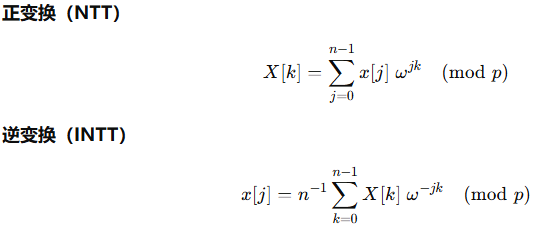
和FFT相关对比如下:

2 算法实现
理解了FFT的数学原理后,我们需要将其转化为可执行的代码。FFT算法有多种实现方式,包括递归实现、迭代实现和基于特定平台的优化实现。
2.1 递归实现FFT
递归实现是最直观的FFT实现方式,它直接对应Cooley-Tukey算法的分治思想。递归算法不断将问题分解为更小的子问题,直到达到基本情况(2点或1点DFT)。


import numpy as np
import matplotlib.pyplot as plt
# 设置字体,确保中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def fft_recursive(x):
"""
递归实现快速傅里叶变换
注意:输入向量x的长度必须是2的幂次
"""
n = len(x)
if n == 1:
return x
# 分别计算偶数索引和奇数索引元素的FFT
even_fft = fft_recursive(x[0::2]) # 偶数索引
odd_fft = fft_recursive(x[1::2]) # 奇数索引
# 计算旋转因子
w = [np.exp(-2j * np.pi * k / n) for k in range(n//2)]
# 组合结果
result = np.zeros(n, dtype=complex)
for k in range(n//2):
term = w[k] * odd_fft[k]
result[k] = even_fft[k] + term
result[k + n//2] = even_fft[k] - term
return result
# 测试递归FFT
def test_fft_recursive():
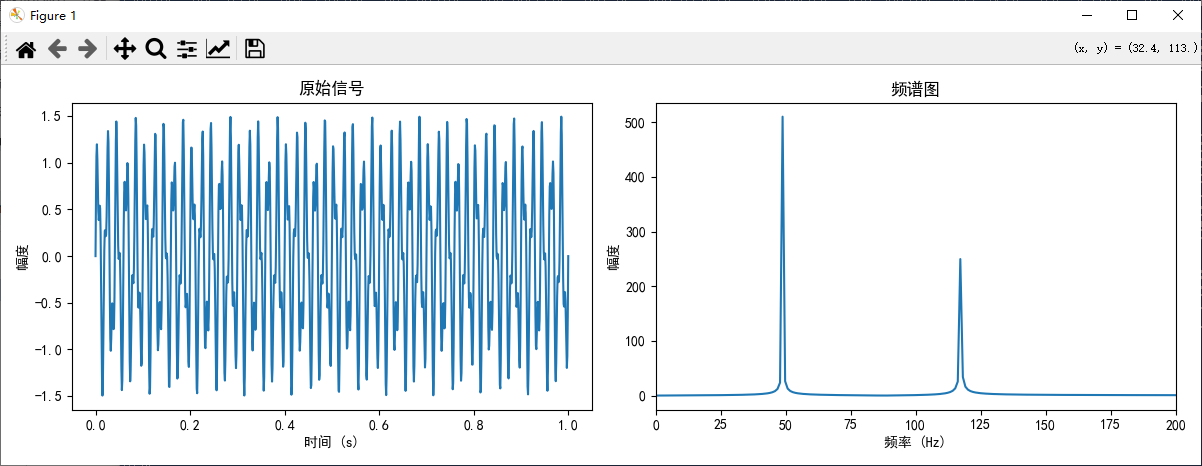
# 生成测试信号:50Hz和120Hz正弦波的叠加
fs = 1000 # 采样频率1000Hz
t = np.linspace(0, 1, 1024) # 1秒时间,1024个点
signal = np.sin(2 * np.pi * 50 * t) + 0.5 * np.sin(2 * np.pi * 120 * t)
# 计算FFT
fft_result = fft_recursive(signal)
# 计算频率轴
freqs = np.fft.fftfreq(len(signal), 1/fs)
print(len(freqs))
# 绘制结果
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.plot(t, signal)
plt.title('原始信号')
plt.xlabel('时间 (s)')
plt.ylabel('幅度')
plt.subplot(1, 2, 2)
plt.plot(freqs[:len(freqs)//2], np.abs(fft_result[:len(fft_result)//2]))
plt.title('频谱图')
plt.xlabel('频率 (Hz)')
plt.ylabel('幅度')
plt.xlim(0, 200)
plt.tight_layout()
plt.show()
if __name__ == "__main__":
test_fft_recursive()递归FFT
程序中以50Hz和120Hz正弦波叠加产生测试信号,通过FFT变换可以这两个信号快速的过滤出来:
递归实现虽然直观,但存在一些缺点:
-
递归调用会产生额外的函数调用开销
-
需要不断创建新的子数组,内存使用不够高效
-
对于大数组,可能导致递归深度过大
因此,在实际应用中,迭代实现通常更受青睐。
2.2 迭代实现FFT
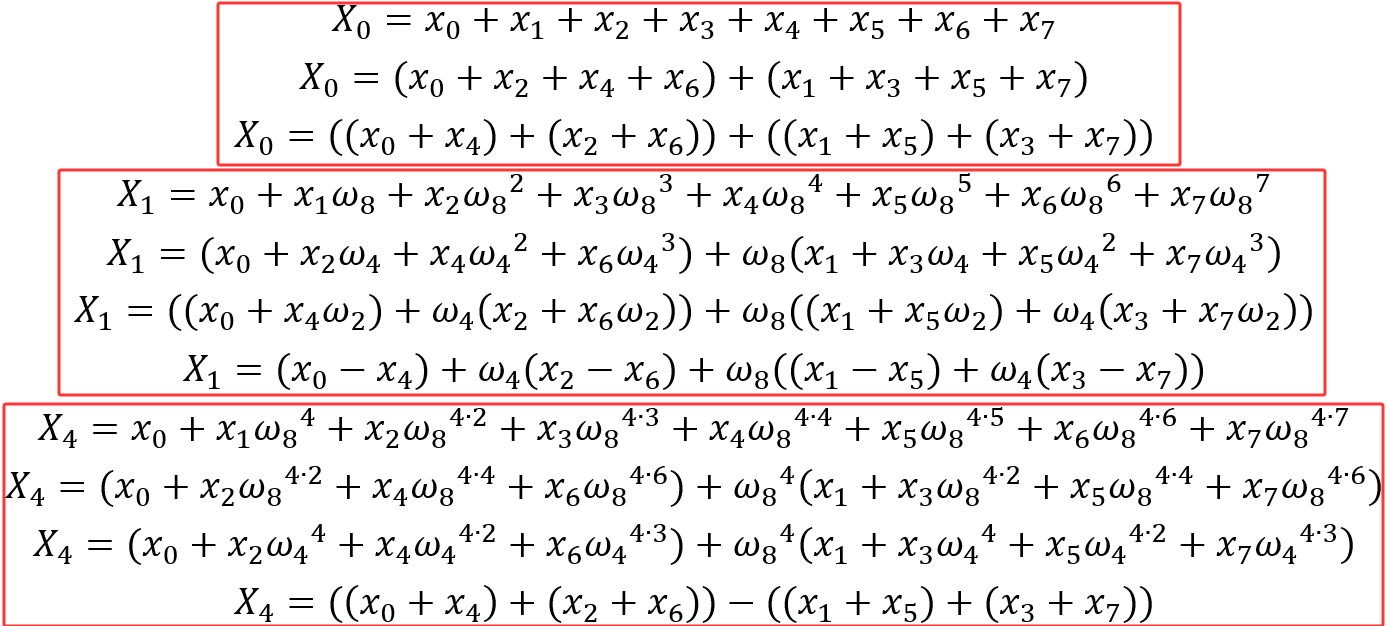
迭代FFT算法通过循环而非递归实现计算,效率更高。迭代算法的核心是首先对输入数组进行位反序排列,然后通过多层循环实现蝶形运算。首先以n=8为例,看下X0 的重排序,由于ω0=1则根据DFT公式可知:

观察以下二进制下标,可知重排序后的二进制下标正是正序下标二进制的逆序,把这种序列叫做逆二进制序:
0 4 2 6 1 5 3 7
000 100 010 110 001 101 011 111
000 001 010 011 100 101 110 111
0 1 2 3 4 5 6 7同理可以给出X1 及X4 =*X0+8/2*的迭代计算过程:
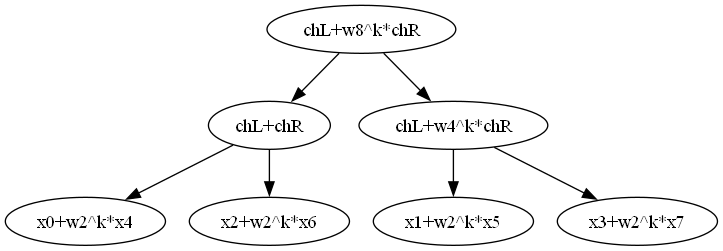
X0 和X4 完全对应迭代公式(1),实际上所有*Xk*计算过程可以由以下二叉树给出:
1 import numpy as np
2 import matplotlib.pyplot as plt
3
4 # 设置字体,确保中文显示
5 plt.rcParams['font.sans-serif'] = ['SimHei']
6 plt.rcParams['axes.unicode_minus'] = False
7
8 def bit_reverse(n, num_bits):
9 """将n的二进制表示进行位反序"""
10 reversed_n = 0
11 for i in range(num_bits):
12 if n & (1 << i):
13 reversed_n |= (1 << (num_bits - 1 - i))
14 return reversed_n
15
16 def fft_iterative(x):
17 """
18 迭代实现快速傅里叶变换
19 输入x的长度必须是2的幂次
20 """
21 n = len(x)
22 num_bits = int(np.log2(n))
23
24 # 位反序排列
25 reversed_index = [bit_reverse(i, num_bits) for i in range(n)]
26 data = x[reversed_index].astype(complex)
27
28 # 迭代计算FFT
29 size = 2
30 while size <= n:
31 half_size = size // 2
32 # 计算旋转因子
33 w_m = np.exp(-2j * np.pi / size)
34
35 for k in range(0, n, size):
36 w = 1
37 for j in range(half_size):
38 t = w * data[k + j + half_size]
39 u = data[k + j]
40 data[k + j] = u + t
41 data[k + j + half_size] = u - t
42 w *= w_m
43 size *= 2
44
45 return data
46
47 # 测试迭代FFT
48 def test_fft_iterative():
49 # 生成测试信号
50 n = 256 # 数据点个数,必须是2的幂次
51 fs = 1000 # 采样频率
52
53 t = np.linspace(0, 1, n)
54 # 生成包含多个频率成分的信号
55 signal = (np.sin(2 * np.pi * 50 * t) +
56 0.5 * np.sin(2 * np.pi * 120 * t) +
57 0.3 * np.sin(2 * np.pi * 200 * t))
58
59 # 添加噪声
60 noise = 0.2 * np.random.normal(size=n)
61 signal += noise
62
63 # 计算FFT
64 fft_result = fft_iterative(signal)
65 freqs = np.fft.fftfreq(n, 1/fs)
66
67 # 与NumPy内置FFT对比
68 np_fft = np.fft.fft(signal)
69
70 # 绘制结果
71 plt.figure(figsize=(15, 5))
72
73 plt.subplot(1, 3, 1)
74 plt.plot(t, signal)
75 plt.title('原始信号 (含噪声)')
76 plt.xlabel('时间 (s)')
77 plt.ylabel('幅度')
78
79 plt.subplot(1, 3, 2)
80 plt.plot(freqs[:n//2], np.abs(fft_result[:n//2]), label='自定义FFT')
81 plt.title('自定义FFT频谱')
82 plt.xlabel('频率 (Hz)')
83 plt.ylabel('幅度')
84 plt.xlim(0, 300)
85
86 plt.subplot(1, 3, 3)
87 plt.plot(freqs[:n//2], np.abs(np_fft[:n//2]), label='NumPy FFT', color='orange')
88 plt.title('NumPy FFT频谱')
89 plt.xlabel('频率 (Hz)')
90 plt.ylabel('幅度')
91 plt.xlim(0, 300)
92
93 plt.tight_layout()
94 plt.show()
95
96 # 计算误差
97 error = np.max(np.abs(fft_result - np_fft))
98 print(f"与NumPy FT的最大误差: {error}")
99
100 if __name__ == "__main__":
101 test_fft_iterative()迭代FFT
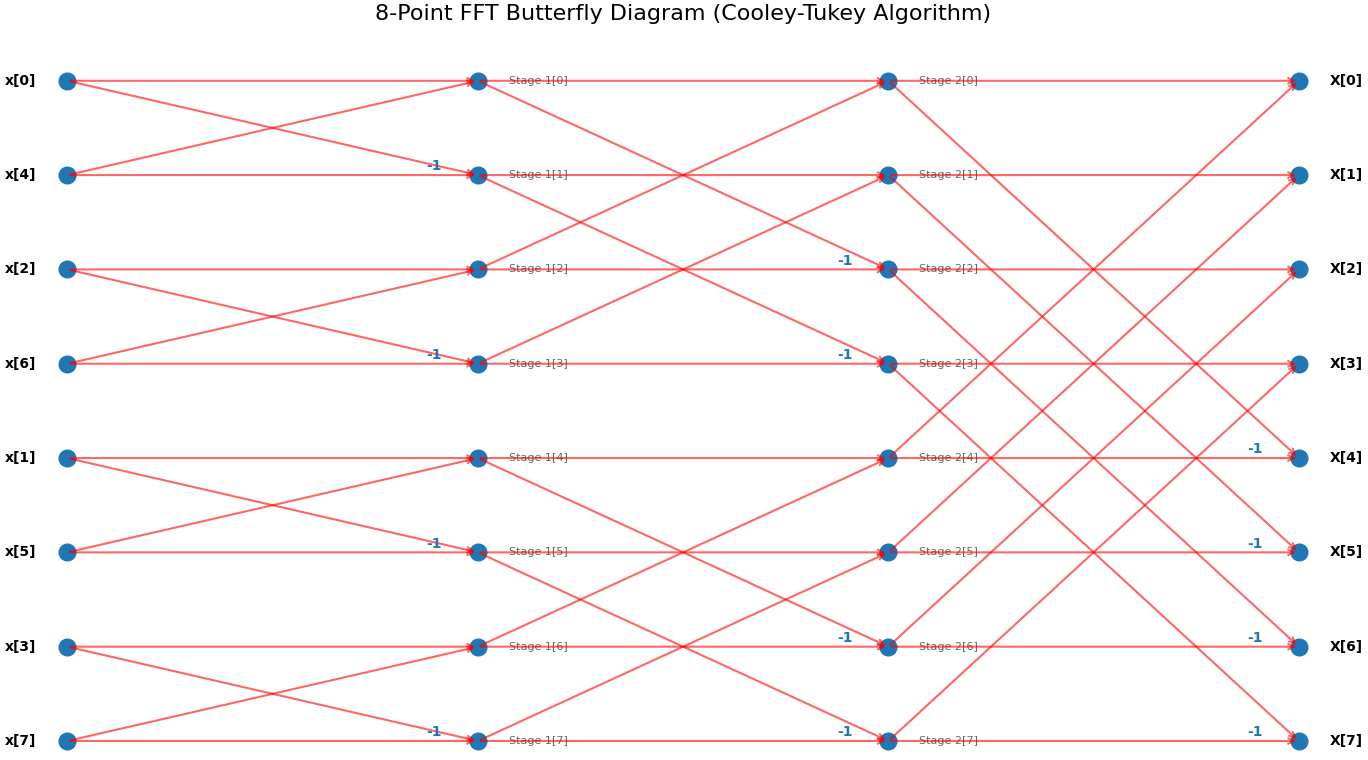
仍以n=8为例,迭代算法中首先对输入进行二进制的逆序,然后进行3个阶段的蝶形计算,第1个阶段由相邻点产生下一级的输出,第2个阶段由间隔一个点的输入产生输出,第3个节点由间隔两个点的输出产生输出,蝴蝶由瘦变胖,如下图所示:
3 应用实例
3.1 音频处理中的应用
FFT(快速傅里叶变换)是音频领域的核心数字信号处理工具,本质是将音频的时域信号(随时间变化的声波振幅)转换为频域信号(不同频率的声音分量占比),而人耳对声音的感知本身就是基于频率的(如音调、音色),这使得 FFT 成为音频采集、分析、处理、合成全链路的基础。
1 音频基础分析
所有音频智能分析的前提,核心是将不可直接解读的时域波形,转换为可量化的频率特征。
核心逻辑
(1)音频在计算机中是采样率固定的时域离散数据(如44.1kHz采样率 = 1秒采集44100个振幅值),波形仅能反映声音的强弱变化,无法直接得到音调、音色等关键信息;
(2)对时域音频段执行一维 FFT,得到频谱(横坐标为频率,纵坐标为对应频率的振幅/能量),频谱直接反映 "哪些频率的声音构成了当前音频";
(3)针对非平稳音频(声音频率随时间变化,如说话、唱歌、乐器演奏),采用STFT(短时傅里叶变换):将音频切分为连续的短帧(如20ms/帧),对每帧独立做FFT,最终得到时频图(横轴时间,纵轴频率,颜色 / 亮度表示能量),实现 "时间-频率" 的二维分析。
典型应用
音频软件的频谱分析仪(如 Audition、Cool Edit):实时显示音频的频率分布,帮助调音师判断声音的频率缺陷;
基础音频特征提取:通过 FFT 计算基频(Fundamental Frequency,F0)(声音的基础音调,如男声基频 80-200Hz,女声 200-500Hz)、谐波(基频的整数倍频率,决定音色)、频谱能量(决定声音响度)。
2 音调检测与音高识别(Pitch Detection)
音调是音频最核心的感知特征之一,FFT是实现音高识别的经典算法基础,广泛用于K歌评分、乐器校音、语音识别。
核心逻辑
(1)纯音(如钢琴单键)的时域波形是周期性的,其频域频谱中能量最高的频率即为基频(F0),对应听觉上的音调;
(2)对乐器/人声的混合音频,通过FFT得到频谱后,筛选出基频峰(主峰值)和其谐波峰,通过峰值检测算法确定实际音高;
(3)工程中会结合自相关法优化FFT的基频检测,解决低信噪比、谐波干扰下的检测误差问题。
典型应用
(1)乐器校音软件(如吉他校音器、钢琴校音器):实时采集乐器声音,通过FFT检测基频,对比标准音高(如 A4=440Hz)给出校音提示;
(2)K歌APP的音高评分(如唱吧、全民K歌):实时分析演唱声音的基频,与原唱基频对比,判断音准并打分;
(3)音乐乐谱自动转写:将演奏音频转换为五线谱,核心是通过 FFT 逐帧检测音高并匹配对应音符。
3 音频滤波:精准去除噪声/保留目标频率
音频滤波是FFT最常用的处理类应用,相比传统的模拟滤波,基于FFT的频域滤波更灵活、精准,可实现任意自定义的频率筛选,核心是 "频域修改,时域重构"。
核心逻辑(与图像 FFT 压缩原理同源)
(1)时域→频域:对音频帧执行 FFT,得到频域系数;
(2)频域滤波:根据需求生成频率掩码,对频域系数做修改:
低通滤波:保留低频系数,置零高频系数(如去除音频中的高频嘶嘶噪声);
高通滤波:保留高频系数,置零低频系数(如去除音频中的低频底噪、电流声);
带通滤波:仅保留指定频率区间的系数(如提取人声音频,保留 300-3400Hz 的人声核心频率);
带阻滤波 / 陷波滤波:置零指定频率区间的系数(如去除 50Hz/60Hz 的市电工频噪声);
(3)频域→时域:对滤波后的频域系数执行逆 FFT(IFFT),转换回时域音频,得到滤波后的声音。
典型应用
(1)语音降噪(如会议录音、麦克风降噪):通过FFT去除背景中的低频底噪、高频环境噪声,保留人声;
(2)音乐制作中的均衡器(EQ):对音乐的低频、中频、高频分别做增益 / 衰减(本质是修改FFT后的频域系数振幅),调整音乐的音色层次;
(3)广播/直播的音频处理:过滤掉人声外的无效频率,提升声音的清晰度。
4 声音合成与音色模拟(加法合成 / 调频合成)
声音的音色由"基频+谐波的频率分布比例"决定,FFT为音色的量化和合成提供了基础,是电子音乐、语音合成的核心技术之一。
核心逻辑
(1)音色的频域本质:不同乐器的同一音调(基频相同),音色不同的原因是谐波的数量、振幅占比不同(如钢琴的谐波丰富且高频衰减快,小提琴的高频谐波更突出);
(2)加法合成:通过 FFT 分析目标乐器的频谱(基频 + 各谐波的能量比例),然后用多个正弦波(对应基频和各谐波)按该比例叠加,合成出与目标乐器相似的音色;
(3)语音合成(TTS):对真人语音做 FFT 分析,得到不同音节的频谱特征,合成时通过调整基频和频谱分布,生成自然的人工语音。
典型应用
(1)电子音乐合成器(如FL Studio、Ableton Live):基于 FFT 的频谱分析,模拟钢琴、吉他、弦乐等传统乐器的音色,或制作自定义的电子音色;
(2)语音合成引擎(如讯飞TTS、百度TTS):通过 FFT 提取语音的频谱特征,提升合成语音的自然度;
(3)声音特效制作:如将人声转换为机器人声(通过FFT修改频谱,压制谐波,保留基频)。
5 音频特征提取与智能分析(AI / 机器学习基础)
当下的音频智能应用(如语音识别、声纹识别、音频分类),其核心特征均基于 FFT 的频域分析,FFT 是连接原始音频数据和 AI 模型的桥梁。
核心逻辑
(1)原始时域音频数据维度高、冗余大,无法直接输入AI模型;
(2)通过 FFT/STFT 将音频转换为频域特征,再进一步提取梅尔频谱(Mel Spectrogram)、梅尔频率倒谱系数(MFCC) 等工程化特征:
梅尔频谱:将 FFT 得到的线性频谱转换为符合人耳听觉特性的梅尔刻度频谱(人耳对低频更敏感,对高频更迟钝);
MFCC:对梅尔频谱做离散余弦变换(DCT),提取的低维系数,是语音识别、声纹识别的经典核心特征;
(3)这些频域特征维度低、辨识度高,是语音识别、音频分类模型的标准输入。
典型应用
(1)语音识别(ASR):如微信语音转文字、讯飞听见,核心特征是MFCC,其提取基础是FFT/STFT;
(2)声纹识别:如手机声纹解锁、银行语音验证,通过 FFT 分析不同人的语音频谱特征(声纹),实现身份识别;
(3)音频分类:如短视频的背景音乐识别、环境声检测(如哭声、玻璃破碎声、汽车鸣笛声),基于梅尔频谱做模型训练,而梅尔频谱的基础是FFT;
(4)音乐推荐:通过FFT分析歌曲的频谱特征(如低频能量占比、节奏对应的频率变化),对歌曲做分类,实现个性化推荐。
6 音频同步与匹配(如音频指纹、音视频同步)
(1)音频指纹(Audio Fingerprint)
核心是通过FFT对音频的时频特征做提取,生成唯一的 "音频指纹",实现音乐识别、音频查重。如摇一摇识曲(QQ音乐、网易云音乐),通过FFT提取待识别音频的时频特征,与服务器中的音频指纹库匹配,快速识别歌曲名称。
(2)音视频同步
视频的画面帧与音频的时间轴易出现错位,通过FFT分析音频的频谱特征变化,与视频的画面特征变化做时间对齐,实现音视频同步校正。
3.2 图像处理中的应用
FFT在图像处理中主要用于频域滤波、图像压缩、纹理分析等。接下来以图像压缩为例进行说明。
图像在计算机中以像素矩阵存储,这是空间域表示:每个数值代表对应位置的亮度/颜色,直观描述图像的空间分布,但数据冗余度高。频域是通过傅里叶变换得到的另一种表示形式,将图像分解为不同频率的正弦/余弦波叠加,频率描述的是像素值的变化快慢:
**低频分量:**像素值变化缓慢,对应图像的整体轮廓、大面积平滑区域、主体结构(如人脸轮廓、天空背景);
**高频分量:**像素值变化剧烈,对应图像的细节纹理、边缘、噪声、微小瑕疵(如发丝、文字边缘、噪点)。
人眼的视觉特性与图像频域特性高度匹配:
人眼对整体轮廓、大面积区域(低频信息)高度敏感,是识别图像的核心依据;
人眼对精细纹理、微小噪声(高频信息)敏感度较低,适度舍弃后,肉眼难以察觉明显失真;
结合这一特性,FFT 压缩可以在保证主观视觉质量的前提下,实现可观的数据压缩。举个例子:一张风景照,蓝天、山脉轮廓是低频核心信息,树叶纹理、水面波纹是高频信息,舍弃 80% 高频系数后,图像依然可清晰识别,仅会轻微模糊。
图像是二维信号,需要使用二维离散傅里叶变换(2D-DFT)完成空间域到频域的转换,FFT图像压缩的本质是利用频域能量分布的不对称性,实现有损数据压缩,完整逻辑分为4个核心步骤:
步骤 1:空间域 → 频域转换(FFT)
对图像(或图像分块)执行二维FFT,将像素值转换为频域系数(复数形式,包含幅度和相位信息)。变换后,默认低频系数分布在频域矩阵的四角,高频在中心;通过fftshift中心化后,低频集中在矩阵中心,高频分布在四周,方便筛选处理。
步骤 2:频域系数量化与截断(核心压缩操作)
基于能量集中特性执行压缩操作:
(1)保留携带绝大部分图像能量的低频系数;
(2)直接舍弃/置零仅携带少量细节、噪声的高频系数;
(3)舍弃的高频信息越多,压缩率越高,图像失真越明显。
一般通过计算频域点到中心的欧式距离筛选低频系数,距离中心越近,频率越低,这是最常用的低频筛选方式。
步骤 3:逆变换重构图像(逆 FFT)
对处理后的频域系数执行逆移位(ifftshift)+ 逆FFT(ifft2),将频域信号转换回空间域,得到压缩重构后的图像。由于逆 FFT 结果会存在微小虚部(浮点计算误差),只需提取实部即可得到有效像素值。
步骤 4:数据存储优化
原始图像存储每个像素的空间域数据,而压缩后仅需存储少量保留的低频系数,大幅减少数据量,实现存储/传输的压缩效果。
以下是源码:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import os
from math import log10, sqrt
from PIL import Image # 新增:用PIL保存图像,兼容所有版本
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def psnr(original, compressed):
"""计算峰值信噪比(PSNR),兼容彩色/灰度图"""
# 若原始图像是彩色图,先转为灰度图再计算PSNR
if len(original.shape) == 3:
original_gray = np.mean(original, axis=2).astype(np.uint8)
else:
original_gray = original.astype(np.uint8)
# 确保压缩后图像是uint8类型
compressed = compressed.astype(np.uint8)
# 计算MSE(均方误差)
mse = np.mean((original_gray - compressed) ** 2)
if mse == 0: # 无误差
return float('inf')
max_pixel = 255.0
psnr_value = 20 * log10(max_pixel / sqrt(mse))
return psnr_value
def fft_image_compress(image, block_size=8, keep_ratio=0.1):
"""基于FFT的图像压缩(自动处理彩色/灰度图)"""
# 1. 彩色图转灰度图(压缩只处理灰度,保留核心逻辑)
if len(image.shape) == 3:
image_gray = np.mean(image, axis=2).astype(np.uint8)
else:
image_gray = image.astype(np.uint8)
h, w = image_gray.shape
# 2. 补零使图像尺寸为block_size的整数倍
pad_h = (block_size - h % block_size) % block_size
pad_w = (block_size - w % block_size) % block_size
print("h {} w {} pad_h {} pad_w {}".format(h, w, pad_h, pad_w))
image_padded = np.pad(image_gray, ((0, pad_h), (0, pad_w)), mode='constant')
h_pad, w_pad = image_padded.shape
# 3. 初始化压缩后的频域数组
fft_compressed = np.zeros_like(image_padded, dtype=np.complex128)
# 4. 分块FFT+高频截断
for i in range(0, h_pad, block_size):
for j in range(0, w_pad, block_size):
block = image_padded[i:i+block_size, j:j+block_size]
# 2D-FFT:空间域→频域(中心化,低频移到中心)
fft_block = np.fft.fft2(block) # 对图像块做二维 FFT,将空间域的像素值转换为频域的复数系数(低频默认在四角,高频在中心
fft_block_shifted = np.fft.fftshift(fft_block) # 将频域系数 "中心化",把低频系数移到频域矩阵的中心,高频系数分布在四周,方便后续筛选低频
# 计算需要保留的低频系数数量
total_coeffs = block_size * block_size # 单个图像块的总系数数(等于像素数)
keep_coeffs = int(total_coeffs * keep_ratio) # 预设的保留比例(如0.1表示保留10%的系数)
keep_coeffs = max(keep_coeffs, 1) # 防止保留系数为0,保证至少保留1个低频系数,避免重构失败
# 生成掩码:只保留低频系数,高频置0
center = block_size // 2 # 频域矩阵的中心坐标(如 block_size=8 时,center=4)
y, x = np.ogrid[:block_size, :block_size] # 生成网格坐标矩阵,对应每个系数在频域中的位置
distance = np.sqrt((y - center)**2 + (x - center)**2) # 计算每个系数到中心的欧式距离(距离越小,频率越低)
flat_distance = distance.flatten() # 将距离矩阵展平为一维数组,方便排序
idx = np.argsort(flat_distance)[:keep_coeffs] # 对距离从小到大排序,取前keep_coeffs个索引(对应距离中心最近的低频系数)
mask_flat = np.zeros(total_coeffs, dtype=bool) # 生成布尔掩码mask:维度与图像块一致
mask_flat[idx] = True # mask中True的位置对应保留的低频系数,False对应舍弃的高频系数
mask = mask_flat.reshape((block_size, block_size))
# 应用掩码:高频系数置零
fft_block_shifted[~mask] = 0 # ~mask:取掩码的反(False变True,True变False),即高频系数的位置。
# 将频域矩阵中高频系数的位置置为 0,只保留低频系数,实现 "压缩"(丢弃高频信息)
# 逆移位+逆FFT:频域→空间域
fft_block = np.fft.ifftshift(fft_block_shifted) # 逆中心化,将频域系数恢复到 FFT 后的原始位置(低频回到四角)
ifft_block = np.fft.ifft2(fft_block) # 对处理后的频域系数做逆 FFT,转换回空间域(结果为复数)
block_recon = np.real(ifft_block) # 取复数的实部(因舍入误差可能有微小虚部,需剔除),得到重构后的图像块像素值
# 存入压缩后数组
fft_compressed[i:i+block_size, j:j+block_size] = block_recon # 将重构后的图像块放回fft_compressed数组的对应位置,最终拼接成完整的压缩后图像
# 5. 去除补零,恢复原始尺寸
compressed_image = fft_compressed[:h, :w]
# 限制像素值范围(0~255),避免溢出
compressed_image = np.clip(compressed_image, 0, 255).astype(np.uint8)
# 6. 计算压缩比(频域系数层面)
total_original_coeffs = h_pad * w_pad
total_keep_coeffs = (h_pad * w_pad) * keep_ratio
compression_ratio = total_original_coeffs / total_keep_coeffs
return compressed_image, compression_ratio
def save_image_with_quality(image, path, quality=95):
"""
兼容所有版本的图像保存函数,支持设置JPG质量
:param image: 灰度图像数组(uint8,0~255)
:param path: 保存路径(如"test.jpg")
:param quality: JPG质量(0~100,值越小压缩越狠)
"""
# 将numpy数组转为PIL Image对象
pil_img = Image.fromarray(image)
# 保存为JPG,设置质量参数
pil_img.save(path, "JPEG", quality=quality)
# 主函数:测试FFT图像压缩
if __name__ == "__main__":
# 1. 读取图像(替换为你的图像路径)
image_path = "1.jpg" # 支持彩色/灰度图
try:
original_image = mpimg.imread(image_path)
# 注意:matplotlib读取的图像像素值是0~1的浮点数,需转回0~255
if original_image.dtype == np.float32:
original_image = (original_image * 255).astype(np.uint8)
except FileNotFoundError:
print("错误:未找到图像文件,自动生成测试灰度图...")
# 生成512×512渐变灰度图作为测试
original_image = np.linspace(0, 255, 512*512).reshape(512, 512).astype(np.uint8)
# 2. 执行FFT压缩(调整keep_ratio控制压缩比)
compressed_image, compress_ratio = fft_image_compress(
original_image, block_size=8, keep_ratio=0.1
)
# 3. 计算PSNR(修复维度不匹配问题)
psnr_value = psnr(original_image, compressed_image)
# 4. 保存图像(改用PIL,支持quality参数,兼容所有版本)
# 保存原图(转灰度后保存,统一对比基准)
if len(original_image.shape) == 3:
original_gray = np.mean(original_image, axis=2).astype(np.uint8)
else:
original_gray = original_image
save_image_with_quality(original_gray, "original_gray.jpg", quality=95)
# 保存压缩后图像,设置JPG质量(值越小文件越小)
save_image_with_quality(compressed_image, "compressed_final.jpg", quality=50)
# 5. 计算实际文件大小(KB)
original_size = os.path.getsize("original_gray.jpg") / 1024 if os.path.exists("original_gray.jpg") else 0
compressed_size = os.path.getsize("compressed_final.jpg") / 1024 if os.path.exists("compressed_final.jpg") else 0
actual_compression_ratio = original_size / compressed_size if (compressed_size > 0 and original_size > 0) else 0
# 6. 显示结果
plt.figure(figsize=(12, 6))
# 原图(彩色/灰度自适应显示)
plt.subplot(1, 2, 1)
if len(original_image.shape) == 3:
plt.imshow(original_image)
else:
plt.imshow(original_image, cmap='gray')
plt.title(f'原始图像\n尺寸:{original_image.shape[1]}×{original_image.shape[0]}\n大小:{original_size:.2f} KB')
plt.axis('off')
# 压缩后图像(灰度)
plt.subplot(1, 2, 2)
plt.imshow(compressed_image, cmap='gray')
plt.title(f'FFT压缩后图像\n理论压缩比:{compress_ratio:.1f}:1\n实际文件压缩比:{actual_compression_ratio:.1f}:1\nPSNR:{psnr_value:.2f} dB')
plt.axis('off')
plt.tight_layout()
plt.show()
# 打印详细信息
print(f"=== 压缩结果 ===")
print(f"理论频域压缩比:{compress_ratio:.1f}:1")
print(f"实际文件压缩比:{actual_compression_ratio:.1f}:1")
print(f"原始文件大小:{original_size:.2f} KB")
print(f"压缩后文件大小:{compressed_size:.2f} KB")
print(f"PSNR(图像质量):{psnr_value:.2f} dB")图像压缩
程序运行效果如下:
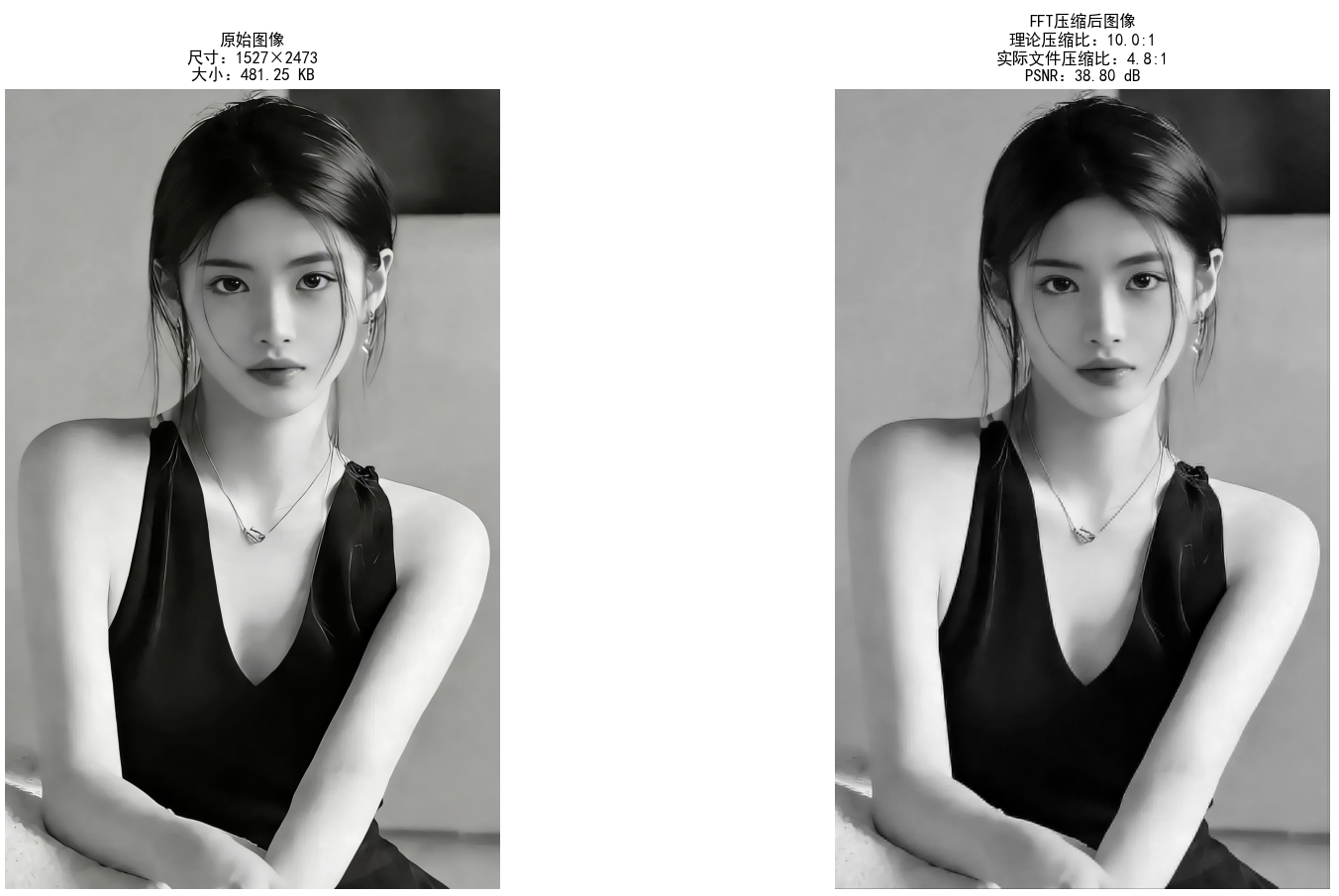
因为运行结果分辨率不高,所以来看压缩后的图片并没有什么不同,但是将图片放大以后还是可以明显看出压缩后图片的失真:
参考:
1 https://zhuanlan.zhihu.com/p/19763358
2 https://www.cnblogs.com/xxeray/p/fast-fourier-transform.html
3 https://blog.csdn.net/qq_42212808/article/details/156030009