前言
本文是博主基于24年电赛e题写出的关于红绿激光点检测的opencv摄像头实时监测代码。
激光点检测是计算机视觉在互动投影、激光定位等场景的典型应用,普通的轮廓检测易受噪声、光照干扰导致坐标抖动,本文以「稳定激光点检测器」为例,讲解如何通过HSV 颜色分割 + 形态学操作 + 时间滤波实现高鲁棒性的激光点定位,适合初学者理解视觉检测的抗干扰优化思路。
目录
[1. 摄像头曝光配置(apply_auto_exposure)](#1. 摄像头曝光配置(apply_auto_exposure))
[2. HSV 掩码生成(hsv_mask)](#2. HSV 掩码生成(hsv_mask))
[3. 激光点中心查找(find_center)](#3. 激光点中心查找(find_center))
[4. 时间滤波(stable_center)](#4. 时间滤波(stable_center))
[五、调试技巧(解决 90% 的问题)](#五、调试技巧(解决 90% 的问题))
[1. 关键参数调优](#1. 关键参数调优)
[2. 常见问题与解决方案](#2. 常见问题与解决方案)
[1. 激光点检测的通用流程](#1. 激光点检测的通用流程)
[2. 抗干扰优化的核心思路](#2. 抗干扰优化的核心思路)
[3. 进阶扩展方向](#3. 进阶扩展方向)
论文投稿:
第九届大数据与应用统计国际学术研讨会(ISBDAS 2026)
大会时间:2026年3月6-8日
大会地点:中国广州

一、核心原理
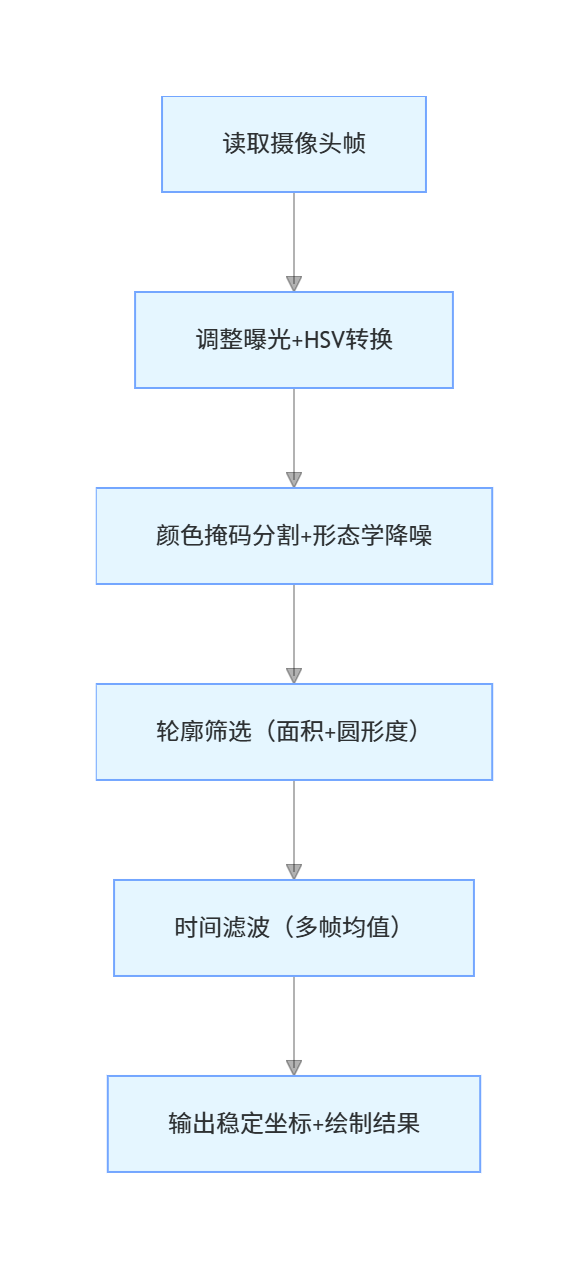
本工具的核心是「精准分割 + 稳定滤波」,解决激光点检测中 "易抖动、易误识别" 的问题,整体逻辑分为三步:
- 颜色精准分割:将图像转为 HSV 空间,通过颜色范围掩码提取红绿激光点区域,排除背景干扰;
- 形态学降噪:通过闭运算 + 开运算消除掩码中的小噪声,强化激光点轮廓;
- 时间滤波稳定:记录多帧激光点坐标,通过均值滤波过滤抖动,输出稳定的坐标。
关键概念解析
| 概念 | 作用 |
|---|---|
| HSV 颜色空间 | 相比 BGR 更易区分颜色,通过 H(色调)精准定位红绿激光,不受亮度干扰 |
| 形态学操作 | 闭运算填充激光点内部空洞,开运算消除背景小噪声,强化激光点轮廓 |
| 时间滤波 | 缓存多帧坐标,仅当连续多帧坐标距离相近时输出均值,避免单点抖动 / 误识别 |
| 圆形度筛选 | 通过轮廓面积与最小外接圆面积的比值,筛选圆形激光点,排除不规则噪声 |
二、环境准备
仅需 OpenCV 和 NumPy 两个核心库,执行以下命令安装:
bash
pip install opencv-python numpy三、核心代码实现(完整注释版)
以下是带详细注释的完整代码,保留核心逻辑的同时,通过注释拆解每个模块的作用:
python
import cv2
import numpy as np
from collections import deque # 用于缓存历史坐标的双向队列
class StableLaserDetector:
def __init__(self, history_len=3):
"""
初始化激光检测器
:param history_len: 时间滤波的历史帧数(越大越稳定,延迟越高)
"""
# 缓存红绿激光点的历史坐标(最多保存history_len帧)
self.h_green = deque(maxlen=history_len) # 绿色激光坐标缓存
self.h_red = deque(maxlen=history_len) # 红色激光坐标缓存
self.show_debug = False # 调试窗口开关(d键切换)
# ---------- 摄像头参数配置 ----------
def apply_auto_exposure(self, cap):
"""
设置摄像头曝光参数,降低环境光对激光点的干扰
:param cap: 摄像头对象
"""
cap.set(cv2.CAP_PROP_AUTO_EXPOSURE, 0.25) # 关闭自动曝光
cap.set(cv2.CAP_PROP_EXPOSURE, -7) # 手动设置曝光值(负数越小曝光越低)
# ---------- 形态学操作:掩码优化 ----------
def hsv_mask(self, hsv, lower, upper):
"""
生成HSV颜色掩码,并通过形态学操作优化
:param hsv: HSV格式图像
:param lower: HSV下限(如绿色:[40,80,80])
:param upper: HSV上限(如绿色:[85,255,255])
:return: 优化后的二值掩码(激光点为白色,背景为黑色)
"""
# 1. 生成初始颜色掩码
mask = cv2.inRange(hsv, lower, upper)
# 2. 闭运算:填充激光点内部的小空洞(迭代2次)
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, np.ones((3,3), np.uint8), iterations=2)
# 3. 开运算:消除背景的小噪声点(迭代1次)
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, np.ones((3,3), np.uint8), iterations=1)
return mask
# ---------- 辅助:绘制HSV颜色范围色带 ----------
def hsv_range_to_bgr_bar(self, lower, upper, bar_h=20, bar_w=300):
"""
将HSV颜色范围转换为可视化色带(便于调试颜色范围)
:param lower/upper: HSV范围
:param bar_h/bar_w: 色带高/宽
:return: BGR格式的色带图像
"""
# 生成H通道渐变,S/V固定为255/200
h = np.linspace(lower[0], upper[0], bar_w).reshape(1, bar_w).astype(np.uint8)
s = np.full((1, bar_w), 255, dtype=np.uint8)
v = np.full((1, bar_w), 200, dtype=np.uint8)
# 转换为BGR格式
bar = cv2.cvtColor(cv2.merge([h, s, v]), cv2.COLOR_HSV2BGR)
return cv2.resize(bar, (bar_w, bar_h), interpolation=cv2.INTER_NEAREST)
def draw_hsv_bars(self, img):
"""在图像左上角绘制红绿激光的HSV范围色带"""
# 生成绿色/红色HSV范围色带
bar_g = self.hsv_range_to_bgr_bar(np.array([40, 80, 80]), np.array([85, 255, 255]))
bar_r = self.hsv_range_to_bgr_bar(np.array([0, 100, 100]), np.array([10, 255, 255]))
# 绘制到图像左上角
img[0:20, 0:300] = bar_g # 绿色色带(0-20行)
img[20:40, 0:300] = bar_r # 红色色带(20-40行)
# 添加文字标注
cv2.putText(img, "GREEN RANGE", (310, 15), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0,255,0), 1)
cv2.putText(img, "RED RANGE", (310, 35), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0,0,255), 1)
# ---------- 核心:时间滤波(稳定坐标) ----------
def stable_center(self, history, new_pt, max_dist=10):
"""
时间滤波:仅当连续多帧坐标稳定时输出均值
:param history: 坐标缓存队列
:param new_pt: 当前帧检测到的坐标(None表示无)
:param max_dist: 坐标最大允许距离(超过则重置缓存)
:return: 稳定后的坐标(None表示未稳定)
"""
# 1. 当前帧无坐标:返回None
if new_pt is None:
return None
# 2. 缓存为空:初始化缓存,返回None(未稳定)
if not history:
history.append(new_pt)
return None
# 3. 与上一帧坐标距离过大:重置缓存,返回None
last = history[-1]
if last is None or np.linalg.norm(np.array(new_pt)-np.array(last)) > max_dist:
history.clear()
history.append(new_pt)
return None
# 4. 坐标稳定:加入缓存
history.append(new_pt)
# 5. 缓存满:返回均值(稳定坐标);未满:返回None
return tuple(np.mean(history, axis=0).astype(int)) if len(history)==history.maxlen else None
# ---------- 主检测函数 ----------
def detect(self, frame):
"""
单帧激光点检测
:param frame: BGR格式的原始帧
:return: 绘制后的帧、绿色稳定坐标、红色稳定坐标
"""
# 1. 转换为HSV空间(颜色分割的基础)
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 2. 生成红绿激光的掩码(红色分两段:0-10和160-179)
mask_g = self.hsv_mask(hsv, np.array([40, 80, 80]), np.array([85, 255, 255])) # 绿色掩码
mask_r1 = self.hsv_mask(hsv, np.array([0, 100, 100]), np.array([10, 255, 255])) # 红色掩码1
mask_r2 = self.hsv_mask(hsv, np.array([160, 100, 100]), np.array([179, 255, 255]))# 红色掩码2
mask_r = cv2.bitwise_or(mask_r1, mask_r2) # 合并红色掩码
# 内部函数:从掩码中查找激光点中心
def find_center(mask, min_area):
"""
从掩码中找到激光点中心(筛选圆形、大轮廓)
:param mask: 二值掩码
:param min_area: 最小轮廓面积(过滤小噪声)
:return: 激光点中心坐标 (x,y),无则返回None
"""
# 查找外部轮廓
cnts, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
best = None
max_area = 0
for c in cnts:
area = cv2.contourArea(c)
if area < min_area: # 过滤小轮廓
continue
# 计算最小外接圆(激光点近似圆形)
(x, y), r = cv2.minEnclosingCircle(c)
# 计算圆形度(面积/外接圆面积,越接近1越圆)
circularity = area / (np.pi * r * r + 1e-6)
if circularity > 0.5: # 筛选圆形轮廓(激光点特征)
if area > max_area: # 保留最大的圆形轮廓
max_area = area
best = (int(x), int(y))
return best
# 3. 查找原始激光点坐标(未滤波)
g_raw = find_center(mask_g, min_area=10) # 绿色激光最小面积10
r_raw = find_center(mask_r, min_area=30) # 红色激光最小面积30(可根据实际调整)
# 4. 时间滤波,得到稳定坐标
g_stable = self.stable_center(self.h_green, g_raw)
r_stable = self.stable_center(self.h_red, r_raw)
# 5. 绘制检测结果
out = frame.copy()
# 绘制绿色/红色稳定激光点
for pt, color in [(g_stable, (0,255,0)), (r_stable, (0,0,255))]:
if pt:
cv2.circle(out, pt, 6, color, 2) # 绘制圆形标记
# 绘制坐标文字(G/R + 坐标)
cv2.putText(out, f"{'G' if color[1]==255 else 'R'}{pt}",
(pt[0]+10, pt[1]), cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, 1)
# 6. 调试窗口(可选)
if self.show_debug:
# 掩码转BGR,便于绘制色带
dbg_g = cv2.cvtColor(mask_g, cv2.COLOR_GRAY2BGR)
dbg_r = cv2.cvtColor(mask_r, cv2.COLOR_GRAY2BGR)
# 绘制HSV色带
self.draw_hsv_bars(dbg_g)
self.draw_hsv_bars(dbg_r)
# 显示调试窗口
cv2.imshow("debug_green", dbg_g)
cv2.imshow("debug_red", dbg_r)
return out, g_stable, r_stable
# ------------------ 主程序:摄像头实时检测 ------------------
def main():
# 1. 初始化摄像头(1=外接,0=内置,根据实际调整)
cap = cv2.VideoCapture(1)
if not cap.isOpened():
print("错误:无法打开摄像头!")
return
# 2. 初始化激光检测器(历史帧数=3)
detector = StableLaserDetector(history_len=3)
# 3. 设置摄像头曝光参数(降低环境光干扰)
detector.apply_auto_exposure(cap)
print("操作说明:按 d 打开/关闭调试窗口,按 q 退出")
# 4. 实时检测循环
while True:
# 读取摄像头帧
ok, frame = cap.read()
if not ok:
print("错误:无法读取摄像头帧!")
break
# 镜像翻转(解决摄像头画面左右颠倒)
frame = cv2.flip(frame, 1)
# 激光点检测
vis, g, r = detector.detect(frame)
# 显示检测结果
cv2.imshow("Laser Detector", vis)
# 打印稳定的激光点坐标(可选)
if g:
print("绿色激光坐标:", g)
if r:
print("红色激光坐标:", r)
# 按键处理
key = cv2.waitKey(1) & 0xFF
if key == ord('q'): # 按q退出
break
if key == ord('d'): # 按d切换调试窗口
detector.show_debug = not detector.show_debug
if not detector.show_debug: # 关闭调试窗口
cv2.destroyWindow("debug_green")
cv2.destroyWindow("debug_red")
# 5. 释放资源
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()四、核心模块解析
1. 摄像头曝光配置(apply_auto_exposure)
- 核心逻辑:关闭自动曝光,手动设置低曝光值;
- 作用:降低环境光亮度,让激光点在画面中更突出,避免过曝导致激光点 "糊掉"。
2. HSV 掩码生成(hsv_mask)
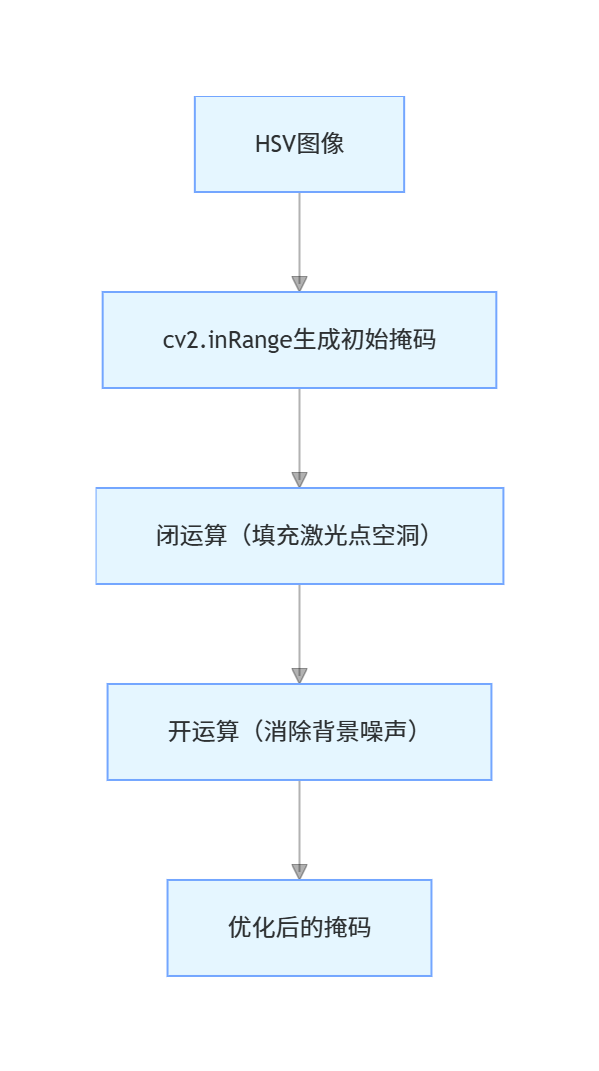
- 闭运算:先膨胀后腐蚀,填充激光点内部的小空洞,保证轮廓完整;
- 开运算:先腐蚀后膨胀,消除背景的小噪声点(如灰尘、光斑)。
3. 激光点中心查找(find_center)
- 核心筛选条件:
- 轮廓面积>最小阈值(过滤小噪声);
- 圆形度>0.5(激光点近似圆形,排除不规则轮廓);
- 关键操作:
cv2.minEnclosingCircle计算最小外接圆,通过面积比判断圆形度。
4. 时间滤波(stable_center)
这是 "稳定检测" 的核心,逻辑如下:
- 缓存为空:存入当前坐标,返回 None(未稳定);
- 当前坐标与上一帧距离>10 像素:重置缓存,返回 None(抖动 / 误识别);
- 缓存满 3 帧:返回 3 帧坐标的均值(稳定坐标);
- 缓存未满:返回 None(等待稳定)。
五、调试技巧(解决 90% 的问题)
1. 关键参数调优
| 参数 | 作用 | 调优建议 |
|---|---|---|
| HSV 颜色范围 | 精准分割激光点 | 打开调试窗口,调整 H 通道范围(如绿色 40-85→35-90) |
| 最小轮廓面积 | 过滤小噪声 | 激光点小→降低 min_area(如 10→5);噪声多→提高 |
| 历史帧数(history_len) | 时间滤波稳定性 | 要求低延迟→设为 2;要求高稳定→设为 4-5 |
| 最大允许距离(max_dist) | 坐标抖动阈值 | 激光点移动快→提高到 15;移动慢→降低到 5 |
| 曝光值(-7) | 摄像头曝光强度 | 激光点过暗→提高(如 - 7→-5);过曝→降低(-7→-9) |
2. 常见问题与解决方案
| 问题现象 | 原因分析 | 解决方案 |
|---|---|---|
| 检测不到激光点 | HSV 范围不对 / 曝光值过高 / 面积阈值高 | 调整 HSV 的 H/S/V 范围;降低曝光值;减小 min_area |
| 激光点坐标抖动 | 历史帧数太少 / 最大距离太大 | 增大 history_len(如 3→4);减小 max_dist(如 10→5) |
| 误识别背景亮点 | 圆形度阈值低 / 面积阈值低 | 提高圆形度阈值(0.5→0.7);增大 min_area;优化 HSV 范围 |
| 红色激光检测不全 | 未处理 HSV 红色第二段区间 | 确认 mask_r1 和 mask_r2 合并;微调第二段 H 范围(160-179) |
六、核心知识点总结
1. 激光点检测的通用流程
2. 抗干扰优化的核心思路
- 颜色域优化:使用 HSV 而非 BGR,通过色调(H)精准定位激光颜色,不受亮度干扰;
- 空间域优化:形态学操作消除噪声,轮廓筛选(面积 + 圆形度)排除非激光点;
- 时间域优化:多帧缓存 + 均值滤波,过滤单帧抖动,输出稳定坐标。
3. 进阶扩展方向
- 多颜色支持:新增蓝色激光检测(HSV 范围:100-120, 80-255, 80-255);
- 动态 HSV 调整:通过滑动条实时调整 HSV 范围,无需修改代码;
- 激光轨迹绘制:缓存历史稳定坐标,绘制激光移动轨迹;
- 距离校准:将像素坐标转换为实际物理坐标(需摄像头标定);
- 多目标区分:当多个激光点存在时,通过轮廓跟踪区分不同激光点。
七、学习收获
通过本案例的学习,可掌握 OpenCV 在 "精准目标检测 + 抗干扰优化" 的核心技巧:
- 摄像头参数(曝光)的手动配置方法;
- HSV 颜色空间的优势及颜色分割技巧;
- 形态学操作在降噪、轮廓强化中的应用;
- 时间滤波在稳定坐标输出中的核心逻辑;
- 基于轮廓的目标特征筛选(面积、圆形度)。
该案例的优化思路可迁移到其他视觉检测场景(如小球跟踪、颜色块定位),是 OpenCV 从 "能检测" 到 "稳定检测" 的关键学习内容。