
完整文章链接

3.1 目标识别
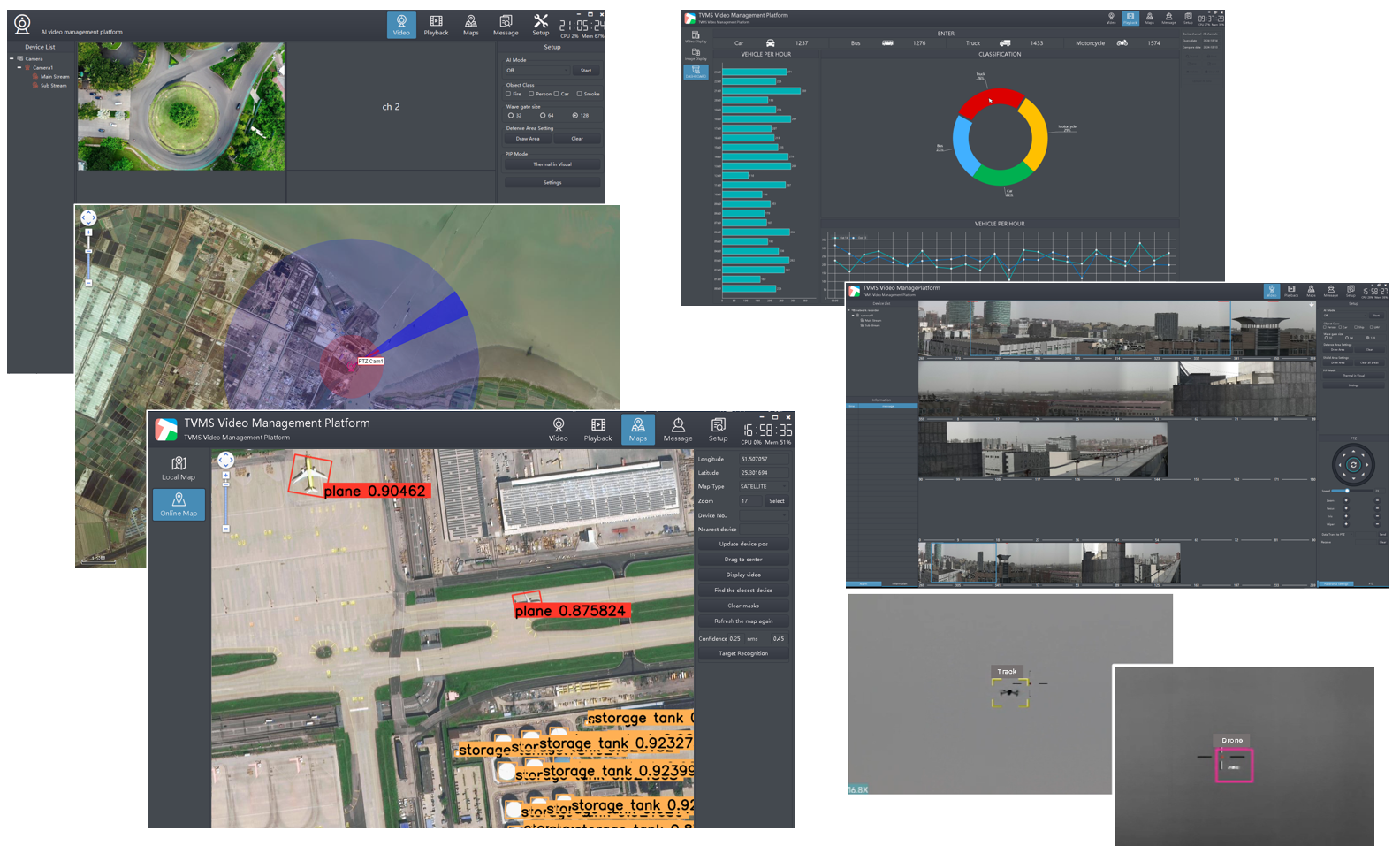
客户端支持 AI 硬件产品下的目标识别功能与客户端模式下的目标识别。
⚠️软件中为了减少误报情况,默认将目标宽或高大于画面一半以上的大物体进行了过滤,即便是识别到也不会显示与输出目标信息,在测试过程中需要注意。
目标尺寸范围支持自主设置,打开【参数设置】,左上角自定义参数列表:
自定义参数2:
识别最小目标像素数量,目标像素小于此数值的会被屏蔽掉。默认配置0,即无限制最小尺寸。
自定义参数3:
识别最大目标像素数量,目标像素大于此数值的会被屏蔽掉。默认配置500,即500Pix以上的目标均被屏蔽掉。
设置后点击 【更新】后生效。
详情请查看自定义参数说明。
在"设备控制"界面中,将 AI 模式切换为"目标识别",并单击"启动"按钮,如图 3-2 所示该设备的视频界面中目标将伴有识别信息框出现。

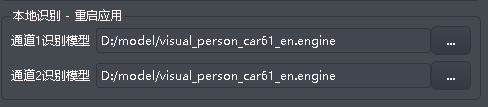
客户端同时支持基于本地GPU的在线算法推理,进行二次目标识别与目标分类、OCR等功能。此部分支持请电询。算法如下图,可本地配置。

3.1.1 围栏区域内目标识别
在视频中绘制可视电子围栏,AI 相机只对可视围栏区域内的目标进行识别,可视围栏区域之外的目标不进行识别。
- 绘制电子可视围栏
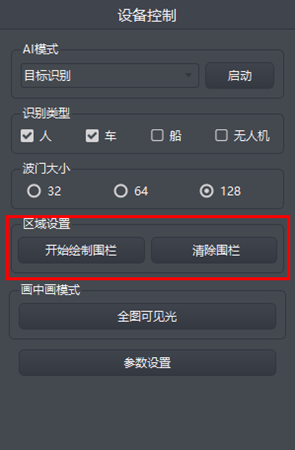
单击"开始绘制围栏"按钮,按钮会变成"结束绘制围栏",将光标移动至该设备的视频显示界面,其绘制步骤如下所述:
A. 双击鼠标左键(开始绘制一个新的围栏区域),鼠标光标变成绘图状态
B. 鼠标左键单击,选择围栏拐点 01
C. 鼠标左键单击,选择围栏拐点 02
D. 鼠标左键单击,选择围栏拐点 N(小于等于 6)
E. 双击鼠标左键(结束绘制新的围栏区域),鼠标光标恢复原样。
绘制后,单击"结束绘制围栏"按钮,结束整个绘制围栏过程。
备注:目标围栏区域只能有一个,每个围栏区域坐标拐点小于等于六个。
绘制围栏后视频显示如下:



动态区域管理
- 清除所有围栏
单击"清除围栏"按钮,即可清除该设备中可视化围栏;
3.1.2 目标识别参数配置
目标识别分类设置,AI 相机支持人、车、船、无人机的目标识别。在模型支持的范围内勾选打开对应类别即可开启此类别的识别。
⚠️注意模型类别区分人车、船、无人机等模型,模型对应的识别类型也是固定的。

3-5
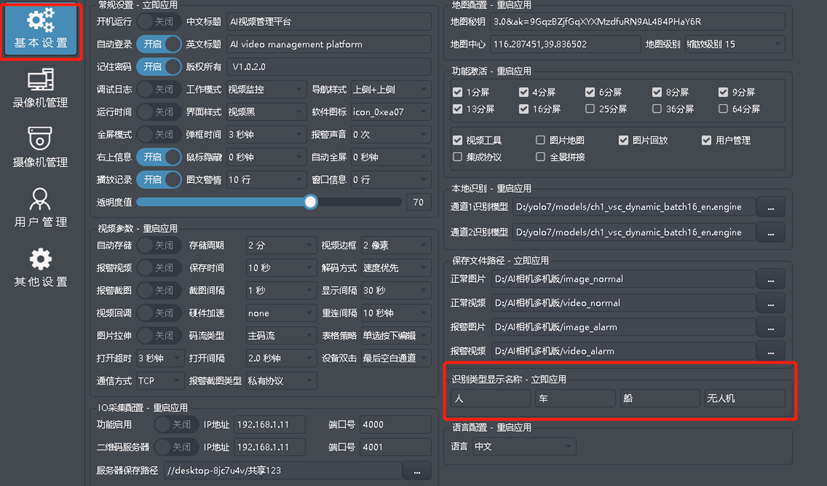
目标识别类别根据识别类型的不同,名字也会有相应的调整,如果模型类别名称与实际类别不一致时,可手动修改名称。名称修改在"系统设置"页面,"基本设置"子页面中。
⚠️仅在特殊模型或定制模型下需要调整,出厂默认提供的人车、船、无人机三个标配模型与类别名称已完全对应,无需修改,其他模型与名称需要手动修改。
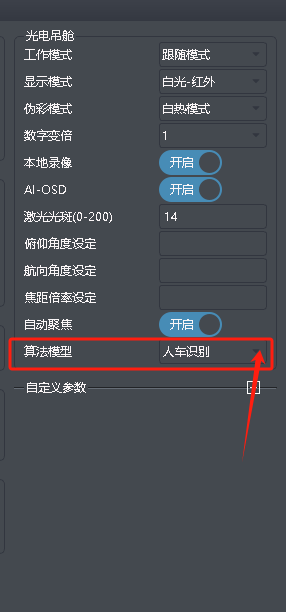
模型类别可在"参数设置"菜单"算法模型"中修改,产品支持哪些类型模型需要与技术进行确认后使用。
⚠️模型分为 人车、船、无人机、飞机、鸟识别模型等几类。
默认出厂标配人车、船、无人机三个标准模型,其他模型出厂未配。
飞机、直升机;鸟识别模型用户请在出厂前告知。如有其他定制需求请联系。
请不要使用"可见光模型","红外模型",此模型为混合识别定制模型,标准出厂时未带此模型。
算法模型修改后设备会自动重启(部分型号可立即生效不重启),并生效新的模型,可通过参数设置页面读取到的模型类别或者通过打开 AI-OSD 查看当前模型。
⚠️客户端支持基于服务器的目标识别、目标分类等多种算法,此功能收费提供支持。
目前可支持多类型模型在线推理。如有需求请电联。
3.2 目标自动跟踪
在自动跟踪模式下,AI 相机识别到目标后,若目标连续 3 帧均稳定识别则开始目标自动跟踪;当 AI 相机有云台控制权限时,相机发送 PELCO-D 或LPP/ExPelcoD指令控制云台按照目标跟踪轨迹运动,直至目标丢失或相机失去云台控制权限。
识别到多个目标时,优先锁定靠近中心区域的目标进行跟踪。跟踪类型为当前模型类型下勾选激活的目标类型。
如当前模型为人车模型,在识别类型中勾选激活"人"则锁定类型"人"的目标。使用时可通过画面OSD显示的当前模型类型字符来判断当前运行的识别模型种类。切换模型类型请查看上一节说明。
将 AI 模式切换为"自动跟踪",并单击"启动"按钮,该设备的视频界面中目标将伴有跟踪信息框出现。

