一、总体效果

整体效果是小车可以沿着黑色轨迹运动,使用红外发射管。本质是用红外发射二极管(IR LED)照地面 ,再用红外接收二极管/光电二极管 感受反射强弱,把"黑线/白底"的反射差异转换成电压,再用 LM393 比较器直接开关左右电机。
二、红外二极管循迹的原理
-
发射端(IR LED):持续向地面打红外光。
-
地面反射:
-
白底(或浅色):反射强 → 回到接收端的红外光更强
-
黑线(或深色):吸收多、反射弱 → 回到接收端的红外光更弱
-
-
接收端(红外接收二极管 / 光电二极管):接收到的光越强,它产生的光电流越大(或等效导通越强)
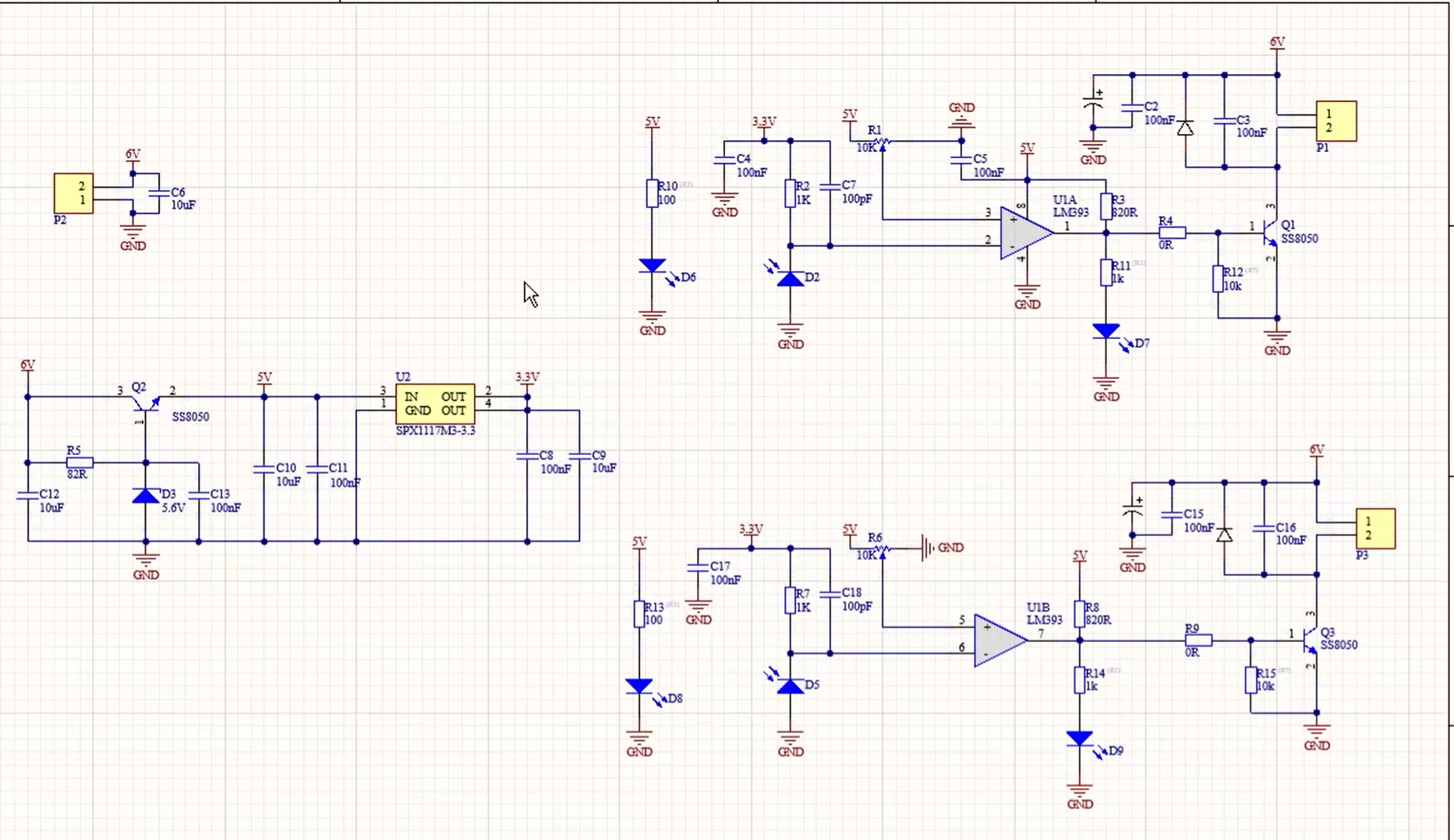
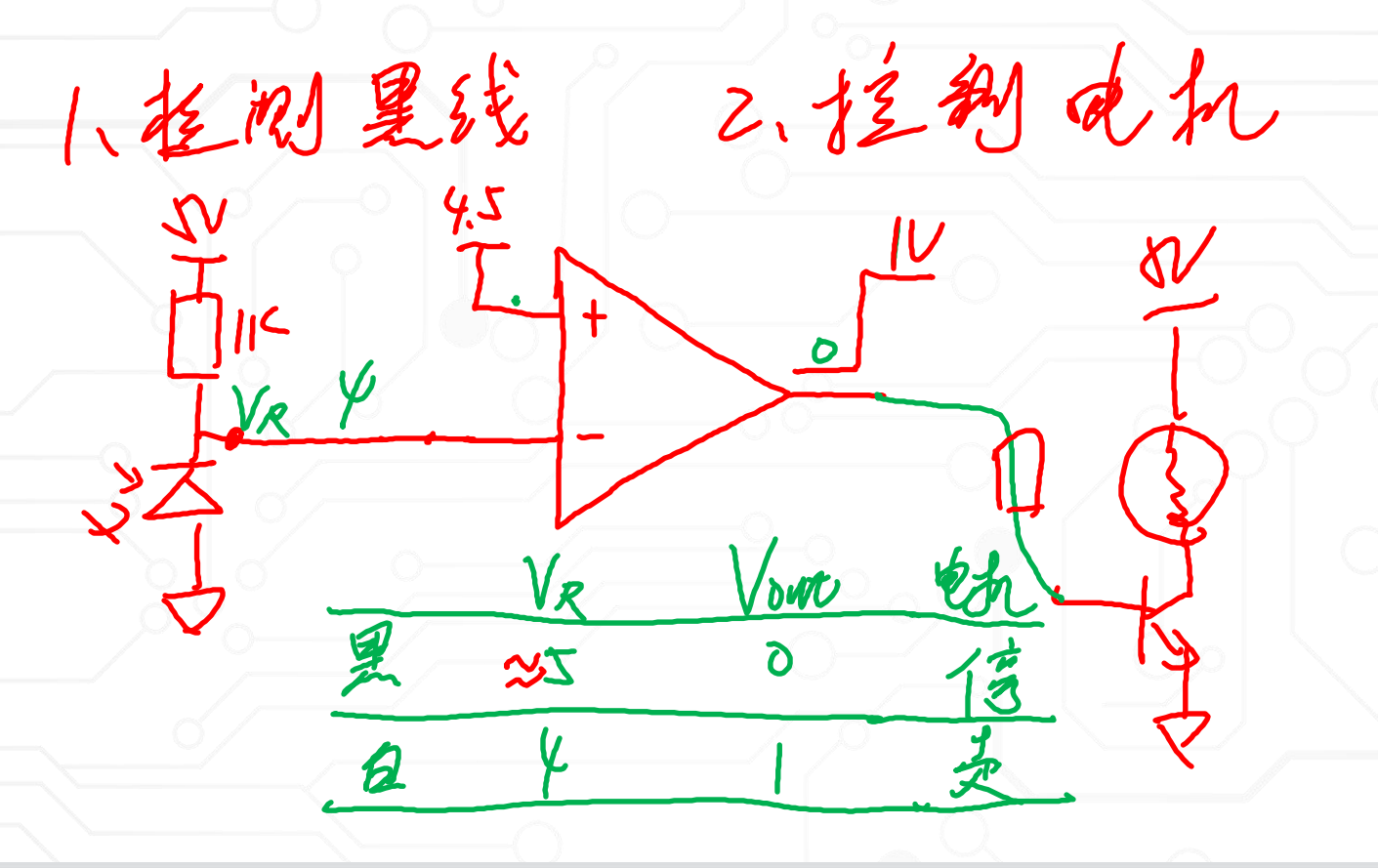
该电路总体框图如下所示,。假设基准电压为4.5V,红外接收二极管工作电流为1mA,R=1KΩ。有红外反射时,
,
Ω,
;没有红外反射小车走到黑色区域时,
,
。通过与比较器的基准电压比较大小,有红外反射时,输出低电平,三极管不导通,电机停止转动;没有红外反射时,输出高低电平,三极管导通,电机转动。
左/右各一套"红外传感 + 比较 + 电机开关",于是自然形成差速:
-
两边都看到白底 → 两电机都转 → 直行
-
左边压到黑线(左侧反射弱)→ 左电机被关/变慢,右电机继续转 → 车向左偏转,直到左侧重新回到白底
-
右边压到黑线 → 右电机被关/变慢,左电机继续转 → 向右偏转
-
两边都黑 → 两边都停(通常意味着到终点/交叉线/完全偏离)
这就是"纯硬件循迹":没有控制算法,只有阈值与开关逻辑。
三、电机控制电路
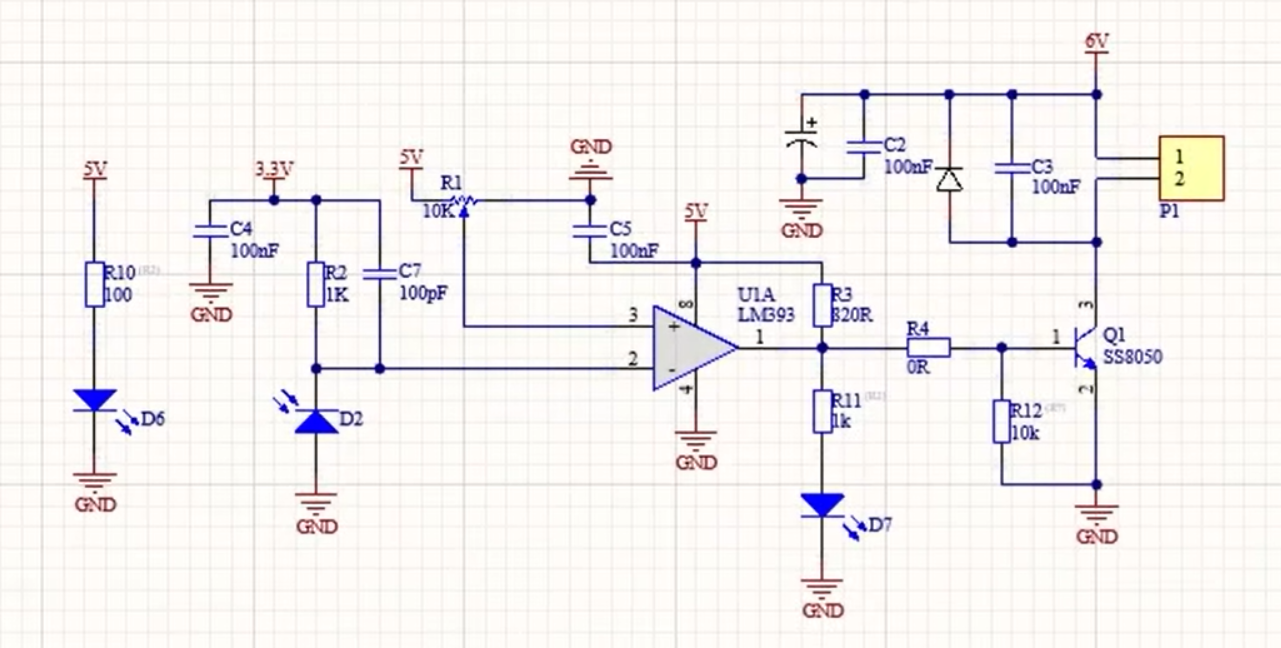
D6为红外发射管,D2为红外接收管,D7是接收红外指示灯,接插件P1外接电机。
注:三极管Q1、二极管所能承受电流须大于电机工作电流。
问题1:R3与R4的阻值是怎么确定的?
电机的驱动电流相对较大,约为500mA,即Ic=500mA。
这里三极管需要工作在饱和导通状态,β*Ib>Ic,Ube=0.7V,三极管放大倍数使用100倍的,即β=100,Ib>5mA。R4+R5<,所以取R3=820Ω,R4=0Ω。
为什么不能取R4=820Ω,取R3=0Ω?
LM393这个比较器是OC输出,R3=0Ω相当于供电电压5V直接通过内部的三极管接地,产生大电流,会烧坏LM393。
问题2:各个电容有什么作用?
电机旁边的C3用来改善电机工作过程中产生的高脉冲噪声。
C2用来滤除电源产生的高频噪声,因为电源不是理想电源实际工作工程中会产生噪声,所以一般会加一些电容做滤波。
电解电容:画PCB时将其放在电机的安装端口附近,可以提供瞬态比较大的电流,三极管导通闭合瞬间形成回路给电机供电,防止电压跌落,同时也能滤除电机高频干扰
四、供电电路
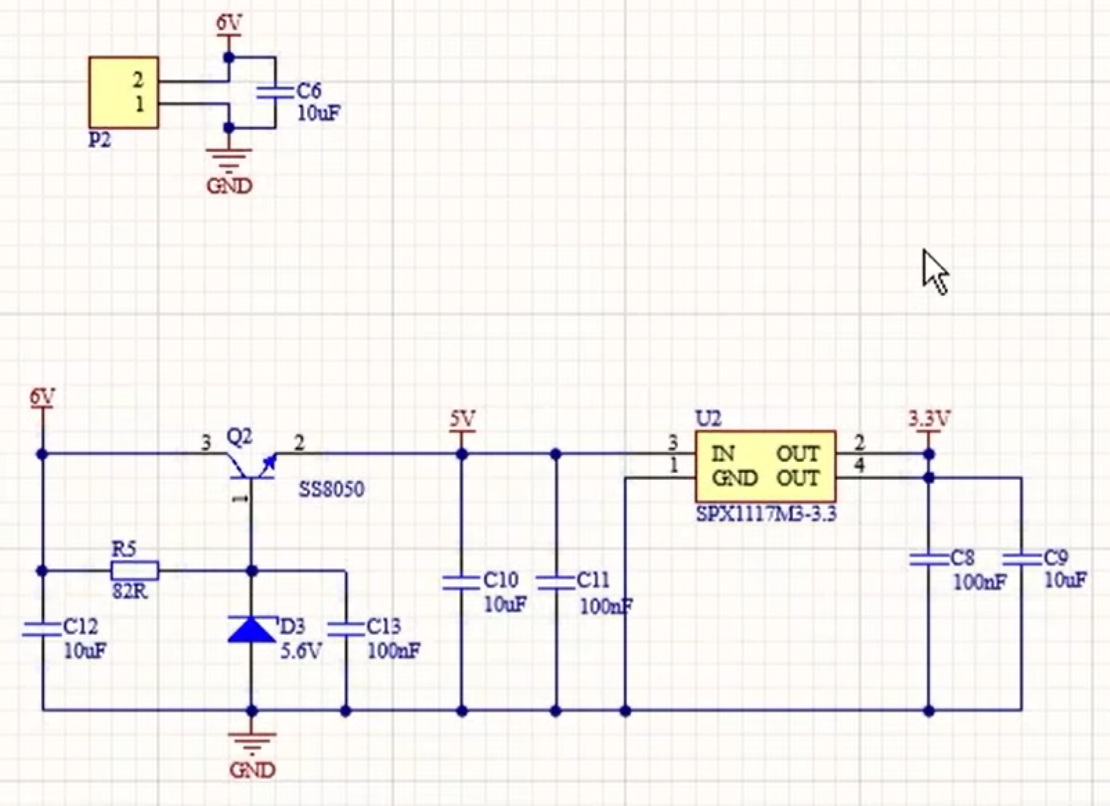
采用NPN 发射极跟随稳压将电压稳定在5V,后续通过LDO电路稳压到3.3V。
Q2 是发射极跟随器,所以:
-
基极被 D3 稳在 ~5.6V
-
发射极(输出)就会稳定在:
问题1:R5阻值怎么确定?
我们需要直到流过稳压管D3的电流以及流过三极管Q2的电流,经过查阅手册可以,流过稳压管导通电流一般为1mA-10mA,我们设其电流为5mA。
三极管工作在预饱和区(放大和饱和之间),Ic≈20mA(通过后级回路估计),β=100,则Ib=0.2mA
R4=,近似取82Ω