一、模板匹配
cv2.matchTemplate(image, templ, method)
image:待搜索图像
templ:模板图像
method:计算匹配程度的方法:
TM_SQDIFF平方差匹配法:该方法采用平方差来进行匹配;匹配越好,值越小;匹配越差,值越大。
TM_CCORR相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
TM_CCOEFF相关系数匹配法:数值越大表明匹配程度越好。
TM_SQDIFF_NORMED归一化平方差匹配法,匹配越好,值越小;匹配越差,值越大。
TM_CCORR_NORMED归一化相关匹配法,数值越大表明匹配程度越好。
TM_CCOEFF_NORMED 归一化相关系数匹配法,数值越大表明匹配程度越好。
相关代码
python
import cv2
# 读取图像
kele = cv2.imread('kele.png')
kele=cv2.resize(kele,dsize=None,fx=1.5,fy=1.5)
tubiao = cv2.imread('tubiao.png')
tubiao=cv2.resize(tubiao,dsize=None,fx=1.5,fy=1.5)
cv2.imshow('kele', kele)
cv2.waitKey(0)
cv2.imshow('tubiao', tubiao)
cv2.waitKey(0)
h, w = tubiao.shape[:2] # 获取模板图像的高度和宽度
# 使用模板匹配方法
res = cv2.matchTemplate(kele, tubiao, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
# min_val:最小匹配值
# max_val:最大匹配值(最匹配的位置)
# min_loc:最小匹配值的位置坐标
# max_loc:最大匹配值的位置坐标(最佳匹配位置)
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
kele_tubiao = cv2.rectangle(kele, top_left, bottom_right, (0, 255, 0), 2)
cv2.imshow('kele_tubiao', kele_tubiao)
cv2.waitKey(0)
cv2.destroyAllWindows()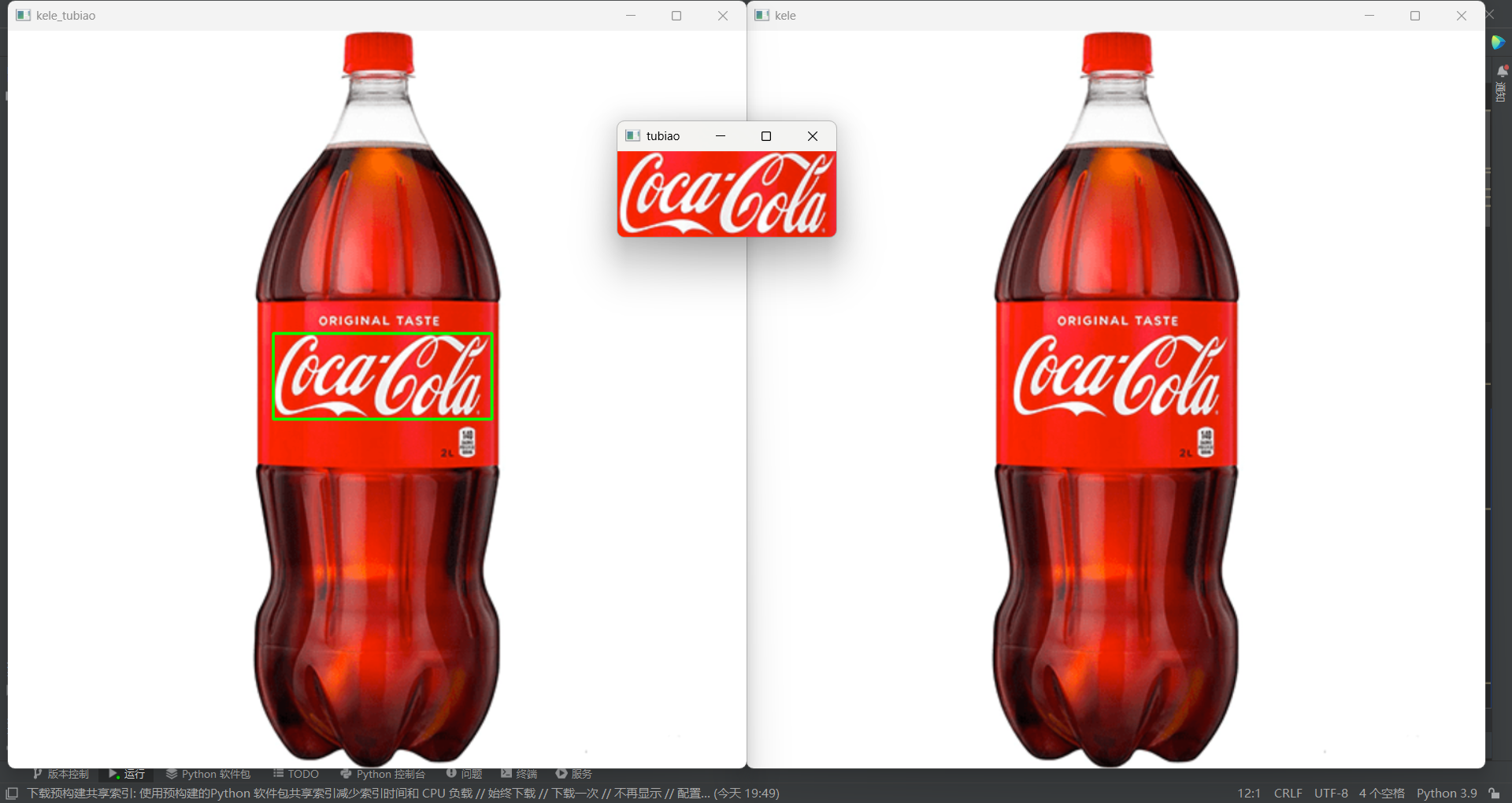
注:模板的大小,要和图形中的所对应模板大小相同
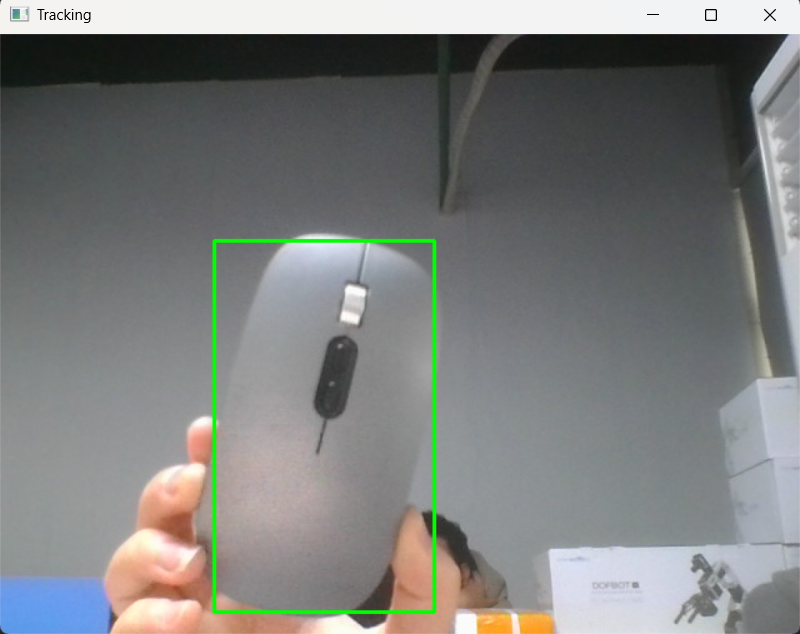
二、物体跟踪
1、概念
物体跟踪是计算机视觉中的一个重要任务,指在视频序列中持续定位和追踪特定目标对象的位置。它不同于物体检测(每帧独立检测),跟踪需要维护目标的身份信息,在连续的帧中跟随同一个目标。
2、实际运用
1. 创建跟踪器
python
tracker = cv2.TrackerCSRT_create()-
cv2.TrackerCSRT_create(): 创建 CSRT 跟踪器 -
OpenCV 提供了多种跟踪算法:
-
TrackerCSRT_create(): 高精度,速度较慢 -
TrackerKCF_create(): 平衡精度和速度 -
TrackerMOSSE_create(): 速度最快,精度较低 -
TrackerMIL_create(): 中等性能
-
2. 选择目标区域
python
roi = cv2.selectROI(windowName='Tracking', img=frame, showCrosshair=False)-
cv2.selectROI(): 让用户在图像上选择矩形区域 -
参数:
-
windowName: 窗口名称 -
img: 要选择ROI的图像 -
showCrosshair: 是否显示十字准线
-
-
返回值:
(x, y, width, height)元组
3. 初始化跟踪器
python
tracker.init(frame, roi)-
tracker.init(): 用第一帧和初始边界框初始化跟踪器 -
参数:
-
frame: 第一帧图像 -
roi: 初始边界框
-
4. 更新跟踪器
python
success, box = tracker.update(frame)-
tracker.update(): 在后续帧中更新跟踪器 -
参数:当前帧图像
-
返回值:
-
success: 布尔值,跟踪是否成功 -
box: 跟踪到的边界框(x, y, width, height)
-
5. 绘制跟踪结果
python
cv2.rectangle(frame, pt1=(x, y), pt2=(x + w, y + h), color=(0, 255, 0), thickness=2)- 在跟踪到的位置上绘制绿色矩形框
完整代码
python
import cv2
# 创建一个CSRT跟踪器实例
tracker = cv2.TrackerCSRT_create()
# 跟踪标志,默认为False
tracking = False
# 打开默认摄像头(通常编号为0)
cap = cv2.VideoCapture(0)
while True:
# 从摄像头读取一帧图像
ret, frame = cap.read()
# 如果没有正确读取到图像,则退出循环
if not ret:
break
# 检查是否有按键被按下,如果是'a'键,则设置跟踪标志为True,并选择ROI
if cv2.waitKey(1) == ord('s'):
tracking = True
# 让用户在当前帧中选择一个矩形区域作为要跟踪的对象
roi = cv2.selectROI(windowName='Tracking', img=frame, showCrosshair=False) # 是否显示十字线
# 初始化跟踪器,传入当前帧和选定的ROI
tracker.init(frame, roi)
# 如果跟踪标志为True,则更新跟踪器
if tracking:
success, box = tracker.update(frame)
# 如果跟踪成功,获取对象的位置
if success:
x, y, w, h = [int(v) for v in box] # 确保所有坐标都是整数
# 在frame上绘制矩形框以显示跟踪结果
cv2.rectangle(frame, pt1=(x, y), pt2=(x + w, y + h), color=(0, 255, 0), thickness=2)
# 显示处理后的帧
cv2.imshow('Tracking',frame)
# 检查是否按下ESC键(ASCII码27),如果按下则退出循环
if cv2.waitKey(1) == 27:
break
# 释放摄像头资源
cap.release()
# 关闭所有OpenCV创建的窗口
cv2.destroyAllWindows()