AGV(自动导引车)在物流、仓储及生产车间的自动化搬运中扮演着核心角色。AGV的小型化、高精度与柔性化需求日益突出,尤其在空间受限的AGV车体内部,传统"电机+驱动器+编码器"分体式方案的体积与布线复杂度已成为技术瓶颈。在AGV小车转向轮控制中,通过采用一体式伺服电机,成功实现了在狭小空间内的高精度转向控制,有效提升了AGV的运动灵活性与系统集成度。

1.应用方案
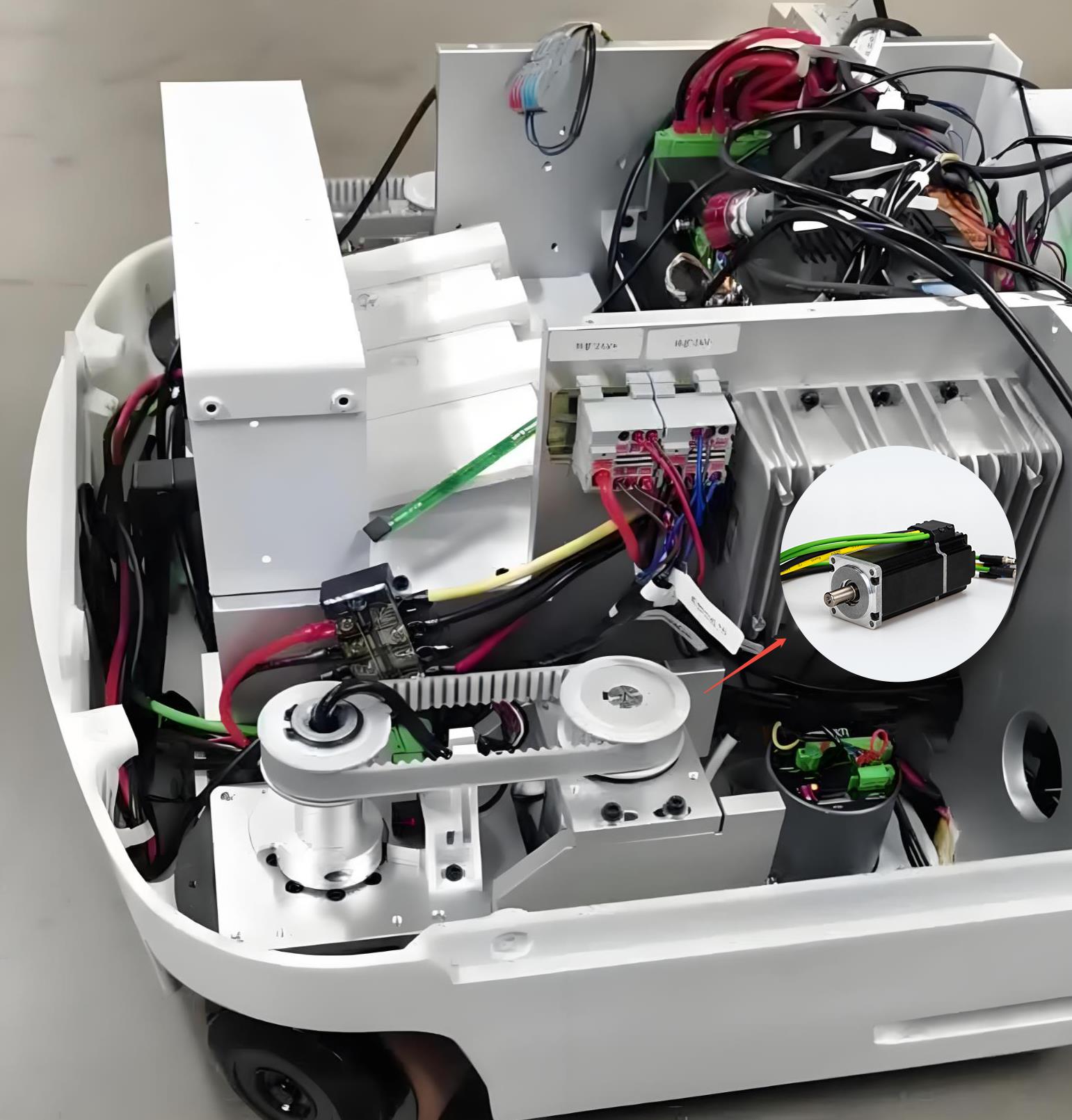
AGV小车转向轮控制方案以 PMM60系列一体式伺服电机为核心:
1.机械结构:采用电机+减速机组合,通过同步轮直接驱动转向轮,省去复杂传动机构,适应AGV内部空间狭小的限制。
2.控制流程:
原点校准:利用电机的堵转检测功能实现原点回归,无需额外安装限位开关,进一步节省空间。
转向控制:通过CANpen通信,在 循环同步周期模式(CSP) 下实时控制转向角度,确保转向响应精确同步。
3.系统集成:电机直接与AGV主控制器(如支持EtherCAT的NIMC2000N运动控制器)协同,实现路径规划与运动调度的无缝对接。
2.应用产品

•核心电机:PMM6020B-CANpen-0FS一体式伺服电机。
•控制支持:CANpen通信协议,兼容CSP模式与原点回归功能。
•关联设备:可根据需求扩展高精度激光雷达(如LR-1F系列)与无风扇工控机(如DTB-3094-H610E),提升导航与避障能力。
3.问题及解决
1.AGV内部空间极端狭小,传统伺服系统难以安装
选用高度集成的PMM6020B一体式电机,减少体积与布线空间占用。
2.转向原点校准需节省硬件成本与空间
利用电机堵转功能实现软件原点回归,省去物理限位开关。
3.转向控制需高实时性与同步精度
采用CANopen下的CSP模式,确保转向指令与系统周期严格同步。
4.长期运行需高可靠性
电机内置过压、过热等多重保护机制,降低故障率。
4.总结概要
本案例中,通过PMM6020B一体式伺服电机,成功解决了AGV小车转向轮在空间限制、精度与实时性方面的核心挑战,为物流自动化与智能制造场景提供了可靠驱动解决方案。