第 6 章:Q-Learning 与 SARSA
本章目标:理解 On-policy 与 Off-policy 的核心区别,掌握 SARSA 和 Q-Learning 算法,通过 Cliff Walking 案例深入理解两者的行为差异,学习 Expected SARSA 作为中间形态,并理解 Maximization Bias (最大化偏差) 问题及 Double Q-Learning 的解决方案。
📖 目录 (Table of Contents)
- [On-policy vs Off-policy](#On-policy vs Off-policy)
- SARSA (On-policy TD Control)
- Q-Learning (Off-policy TD Control)
- [Cliff Walking 案例分析](#Cliff Walking 案例分析)
- [Expected SARSA](#Expected SARSA)
- [Maximization Bias 与 Double Q-Learning](#Maximization Bias 与 Double Q-Learning)
- 算法对比总结
- 实战技巧:超参数衰减
- 表格型方法的局限
- 总结与预告
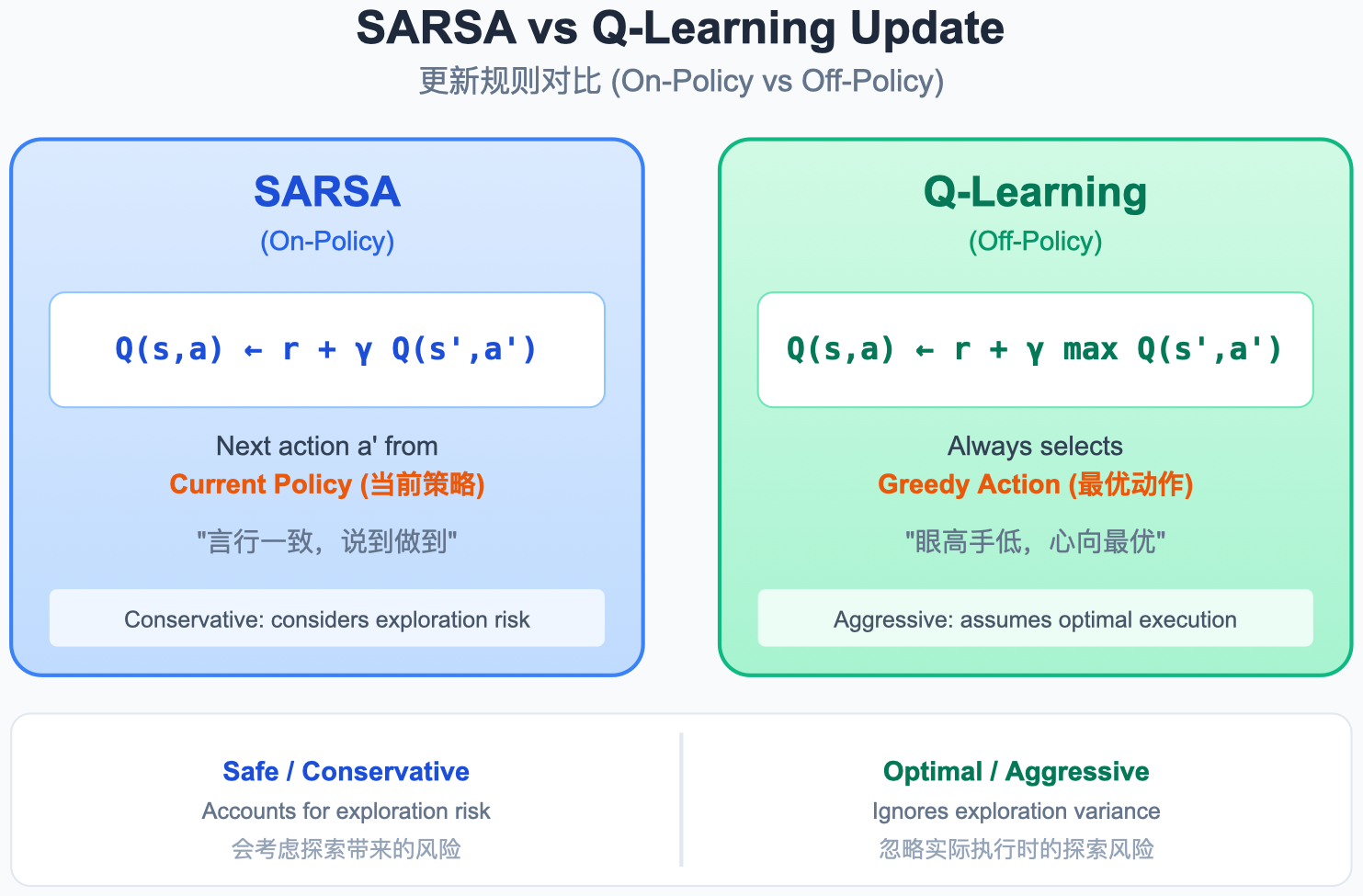
1. On-policy vs Off-policy

图解说明:
- On-policy:用什么策略采样,就用什么策略更新。吃自家菜。
- Off-policy:用一个行为策略 (Behavior Policy) 采样,同时优化另一个目标策略 (Target Policy)。可以吃别人家的菜学习做饭。
| 类型 | 定义 | 行为策略与目标策略 | 代表算法 |
|---|---|---|---|
| On-policy | 评估和改进同一策略 | π b e h a v i o r = π t a r g e t \pi_{behavior} = \pi_{target} πbehavior=πtarget | SARSA |
| Off-policy | 评估目标策略,使用行为策略采样 | π b e h a v i o r ≠ π t a r g e t \pi_{behavior} \neq \pi_{target} πbehavior=πtarget | Q-Learning |
2. SARSA (On-policy TD Control)
名称来源 :State-Action-Reward-State-Action,即 ( S t , A t , R t + 1 , S t + 1 , A t + 1 ) (S_t, A_t, R_{t+1}, S_{t+1}, A_{t+1}) (St,At,Rt+1,St+1,At+1) 五元组。
更新公式:
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ Q ( S t + 1 , A t + 1 ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \left R_{t+1} + \\gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t) \\right Q(St,At)←Q(St,At)+αRt+1+γQ(St+1,At+1)−Q(St,At)
关键特征:下一步动作 A t + 1 A_{t+1} At+1 由同一个 ϵ \epsilon ϵ-greedy 策略选取,因此更新值包含了探索行为带来的风险。
代码实现 (SARSA)
python
import numpy as np
from collections import defaultdict
def sarsa(env, num_episodes=5000, alpha=0.1, gamma=0.99, epsilon=0.1):
"""SARSA: On-policy TD Control"""
Q = defaultdict(lambda: defaultdict(float))
def epsilon_greedy(state):
if np.random.random() < epsilon:
return np.random.choice(env.get_actions())
action_values = Q[state]
if not action_values:
return np.random.choice(env.get_actions())
return max(action_values, key=action_values.get)
for _ in range(num_episodes):
state = env.reset()
action = epsilon_greedy(state)
while True:
next_state, reward, done = env.step(state, action)
next_action = epsilon_greedy(next_state)
# SARSA 更新:使用实际选取的 next_action
td_target = reward + gamma * Q[next_state][next_action] * (not done)
td_error = td_target - Q[state][action]
Q[state][action] += alpha * td_error
state = next_state
action = next_action
if done: break
return Q3. Q-Learning (Off-policy TD Control)
更新公式:
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ max a ′ Q ( S t + 1 , a ′ ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \left R_{t+1} + \\gamma \\max_{a'} Q(S_{t+1}, a') - Q(S_t, A_t) \\right Q(St,At)←Q(St,At)+αRt+1+γa′maxQ(St+1,a′)−Q(St,At)
关键特征:无论实际采取什么动作,更新目标始终使用 max a ′ Q ( S t + 1 , a ′ ) \max_{a'} Q(S_{t+1}, a') maxa′Q(St+1,a′),即假设未来总是走最优路线。
代码实现 (Q-Learning)
python
def q_learning(env, num_episodes=5000, alpha=0.1, gamma=0.99, epsilon=0.1):
"""Q-Learning: Off-policy TD Control"""
Q = defaultdict(lambda: defaultdict(float))
def epsilon_greedy(state):
if np.random.random() < epsilon:
return np.random.choice(env.get_actions())
action_values = Q[state]
if not action_values:
return np.random.choice(env.get_actions())
return max(action_values, key=action_values.get)
for _ in range(num_episodes):
state = env.reset()
while True:
action = epsilon_greedy(state)
next_state, reward, done = env.step(state, action)
# Q-Learning 更新:使用 max 而非实际动作
max_next_q = max(Q[next_state].values()) if Q[next_state] else 0
td_target = reward + gamma * max_next_q * (not done)
td_error = td_target - Q[state][action]
Q[state][action] += alpha * td_error
state = next_state
if done: break
return Q4. Cliff Walking 案例分析
4.1 环境描述
Cliff Walking (悬崖漫步) 是 Sutton & Barto 教材中经典的 4x12 网格世界:
- 起点 :左下角 ( 3 , 0 ) (3, 0) (3,0)
- 终点 :右下角 ( 3 , 11 ) (3, 11) (3,11)
- 悬崖 :底行中间位置 ( 3 , 1 ) (3, 1) (3,1) 到 ( 3 , 10 ) (3, 10) (3,10),踩到立即回到起点并获得 − 100 -100 −100 奖励
- 每步奖励 : − 1 -1 −1(鼓励尽快到达终点)
代码实现 (Cliff Walking Environment)
python
class CliffWalkingEnv:
"""4x12 Cliff Walking 环境"""
def __init__(self):
self.rows, self.cols = 4, 12
self.start = (3, 0)
self.goal = (3, 11)
self.cliff = [(3, c) for c in range(1, 11)]
def reset(self):
self.state = self.start
return self.state
def get_actions(self):
return [0, 1, 2, 3] # 上、下、左、右
def step(self, state, action):
moves = {0: (-1, 0), 1: (1, 0), 2: (0, -1), 3: (0, 1)}
dr, dc = moves[action]
nr = max(0, min(self.rows - 1, state[0] + dr))
nc = max(0, min(self.cols - 1, state[1] + dc))
next_state = (nr, nc)
if next_state in self.cliff:
return self.start, -100, False
elif next_state == self.goal:
return next_state, -1, True
else:
return next_state, -1, False4.2 更新机制对比
图解说明:
- SARSA 更新 :使用实际采取的 A t + 1 A_{t+1} At+1,可能是探索性动作(随机走一步)。
- Q-Learning 更新 :假设执行最优动作 max a ′ Q \max_{a'} Q maxa′Q,与实际行为无关。
4.3 路径差异与直觉

图解说明:
- Q-Learning (乐观派):学出紧贴悬崖的最短路径,因为更新目标假设未来总走最优动作,不会掉坑。
- SARSA (务实派) :学出远离悬崖的安全路径,因为更新目标包含了 ϵ \epsilon ϵ-greedy 探索可能掉下悬崖的风险。
4.4 训练曲线观察
- Q-Learning:训练过程中频繁掉入悬崖(累积惩罚大),但最终收敛策略是最短路径。
- SARSA:训练过程中较少掉入悬崖(累积惩罚小),最终收敛策略是安全路径。
结论:在线控制场景(如机器人实时行走)优先用 SARSA;只关心最终最优解(如离线训练后部署)优先用 Q-Learning。
5. Expected SARSA
SARSA 与 Q-Learning 的中间形态:用策略的期望值替代单次采样。
更新公式:
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ ∑ a ′ π ( a ′ ∣ S t + 1 ) Q ( S t + 1 , a ′ ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \left R_{t+1} + \\gamma \\sum_{a'} \\pi(a'\|S_{t+1}) Q(S_{t+1}, a') - Q(S_t, A_t) \\right Q(St,At)←Q(St,At)+αRt+1+γa′∑π(a′∣St+1)Q(St+1,a′)−Q(St,At)
- 当 π \pi π 是 ϵ \epsilon ϵ-greedy 策略时,Expected SARSA 是 On-policy 的
- 当 π \pi π 是 greedy 策略时,Expected SARSA 退化为 Q-Learning
代码实现 (Expected SARSA)
python
def expected_sarsa(env, num_episodes=5000, alpha=0.1, gamma=0.99, epsilon=0.1):
"""Expected SARSA: 使用期望值替代单次采样"""
Q = defaultdict(lambda: defaultdict(float))
for _ in range(num_episodes):
state = env.reset()
while True:
# epsilon-greedy 行为策略
if np.random.random() < epsilon:
action = np.random.choice(env.get_actions())
else:
action = max(Q[state], key=Q[state].get) if Q[state] else np.random.choice(env.get_actions())
next_state, reward, done = env.step(state, action)
# 计算期望 Q 值
actions = env.get_actions()
n_actions = len(actions)
expected_q = 0
if Q[next_state]:
best_action = max(Q[next_state], key=Q[next_state].get)
for a in actions:
if a == best_action:
expected_q += (1 - epsilon + epsilon / n_actions) * Q[next_state][a]
else:
expected_q += (epsilon / n_actions) * Q[next_state][a]
# 更新
td_target = reward + gamma * expected_q * (not done)
Q[state][action] += alpha * (td_target - Q[state][action])
state = next_state
if done: break
return Q6. Maximization Bias 与 Double Q-Learning
6.1 问题根源
Q-Learning 的更新目标使用 max \max max 操作:
Y Q = R t + 1 + γ max a ′ Q ( S t + 1 , a ′ ) Y^{Q} = R_{t+1} + \gamma \max_{a'} Q(S_{t+1}, a') YQ=Rt+1+γa′maxQ(St+1,a′)
根据 Jensen 不等式 (Jensen's Inequality): E max ( X ) ≥ max ( E X ) E\\max(X) \ge \max(EX) Emax(X)≥max(EX)
当 Q 值估计存在噪声时, max \max max 操作会系统性地选中被高估的动作,导致正向偏差(过估计,Overestimation)。
6.2 数值示例
考虑一个状态 s s s,有 3 个动作,真实 Q 值均为 0:
| 动作 | 真实值 Q ∗ ( s , a ) Q^*(s,a) Q∗(s,a) | 估计值 Q ^ ( s , a ) \hat{Q}(s,a) Q^(s,a)(含噪声) |
|---|---|---|
| a 1 a_1 a1 | 0 | +0.3 |
| a 2 a_2 a2 | 0 | -0.2 |
| a 3 a_3 a3 | 0 | +0.5 |
- 真实最优值: max a Q ∗ ( s , a ) = 0 \max_a Q^*(s,a) = 0 maxaQ∗(s,a)=0
- 估计最优值: max a Q ^ ( s , a ) = + 0.5 \max_a \hat{Q}(s,a) = +0.5 maxaQ^(s,a)=+0.5(选中了噪声最大的 a 3 a_3 a3)
- 偏差 = + 0.5 − 0 = + 0.5 +0.5 - 0 = +0.5 +0.5−0=+0.5
这种正向偏差会在 Bootstrapping 过程中层层传递,导致 Q 值全面膨胀,严重时使策略退化。
6.3 解决方案:Double Q-Learning
核心思想:维护两个独立的 Q 表,将动作选择 和价值评估解耦。
Y D o u b l e Q = R t + 1 + γ Q 2 ( S t + 1 , arg max a ′ Q 1 ( S t + 1 , a ′ ) ) Y^{DoubleQ} = R_{t+1} + \gamma Q_2\left(S_{t+1},\ \arg\max_{a'} Q_1(S_{t+1}, a')\right) YDoubleQ=Rt+1+γQ2(St+1, arga′maxQ1(St+1,a′))
- Q 1 Q_1 Q1 负责选动作(哪个动作最好?)
- Q 2 Q_2 Q2 负责评估该动作的价值(这个动作到底值多少?)
- 每步随机选择更新 Q 1 Q_1 Q1 或 Q 2 Q_2 Q2,两者轮流充当选择者和评估者
代码实现 (Double Q-Learning)
python
def double_q_learning(env, num_episodes=5000, alpha=0.1, gamma=0.99, epsilon=0.1):
"""Double Q-Learning: 解耦动作选择与价值评估"""
Q1 = defaultdict(lambda: defaultdict(float))
Q2 = defaultdict(lambda: defaultdict(float))
def epsilon_greedy(state):
combined = defaultdict(float)
for a in env.get_actions():
combined[a] = Q1[state][a] + Q2[state][a]
if np.random.random() < epsilon:
return np.random.choice(env.get_actions())
return max(combined, key=combined.get) if combined else np.random.choice(env.get_actions())
for _ in range(num_episodes):
state = env.reset()
while True:
action = epsilon_greedy(state)
next_state, reward, done = env.step(state, action)
# 随机选择更新 Q1 或 Q2
if np.random.random() < 0.5:
best_a = max(Q1[next_state], key=Q1[next_state].get) if Q1[next_state] else np.random.choice(env.get_actions())
td_target = reward + gamma * Q2[next_state][best_a] * (not done)
Q1[state][action] += alpha * (td_target - Q1[state][action])
else:
best_a = max(Q2[next_state], key=Q2[next_state].get) if Q2[next_state] else np.random.choice(env.get_actions())
td_target = reward + gamma * Q1[next_state][best_a] * (not done)
Q2[state][action] += alpha * (td_target - Q2[state][action])
state = next_state
if done: break
# 返回合并后的 Q 表
Q = defaultdict(lambda: defaultdict(float))
for s in set(list(Q1.keys()) + list(Q2.keys())):
for a in set(list(Q1[s].keys()) + list(Q2[s].keys())):
Q[s][a] = (Q1[s][a] + Q2[s][a]) / 2
return Q7. 算法对比总结
7.1 更新公式对比
| 算法 | 更新目标 (TD Target) | 类型 |
|---|---|---|
| SARSA | R + γ Q ( S ′ , A ′ ) R + \gamma Q(S', A') R+γQ(S′,A′),其中 A ′ ∼ π A' \sim \pi A′∼π | On-policy |
| Q-Learning | R + γ max a ′ Q ( S ′ , a ′ ) R + \gamma \max_{a'} Q(S', a') R+γmaxa′Q(S′,a′) | Off-policy |
| Expected SARSA | R + γ ∑ a ′ π ( a ′ ∣ S ′ ) Q ( S ′ , a ′ ) R + \gamma \sum_{a'} \pi(a' \mid S') Q(S', a') R+γ∑a′π(a′∣S′)Q(S′,a′) | On/Off-policy |
| Double Q-Learning | R + γ Q 2 ( S ′ , arg max a ′ Q 1 ( S ′ , a ′ ) ) R + \gamma Q_2(S', \arg\max_{a'} Q_1(S', a')) R+γQ2(S′,argmaxa′Q1(S′,a′)) | Off-policy |
7.2 特性对比
| 特性 | SARSA | Q-Learning | Expected SARSA |
|---|---|---|---|
| 策略类型 | On-policy | Off-policy | 取决于 π \pi π |
| 更新方差 | 较高(单次采样) | 中等 | 较低(期望值) |
| 过估计风险 | 低 | 高 | 中 |
| 安全性 | 高(考虑探索风险) | 低(忽略探索风险) | 中 |
| 收敛策略 | ϵ \epsilon ϵ-greedy 最优 | 全局最优 | ϵ \epsilon ϵ-greedy 最优 |
| 计算复杂度 | O ( 1 ) O(1) O(1) | O ( 1 ) O(1) O(1) | O ( ∣ A ∣ ) O(|A|) O(∣A∣) |
7.3 选型建议
- 在线安全敏感场景(机器人、自动驾驶):优先 SARSA 或 Expected SARSA
- 离线训练、追求最优策略:优先 Q-Learning
- 需要低方差更新:优先 Expected SARSA
- Q 值过估计严重:使用 Double Q-Learning
8. 实战技巧:超参数衰减
8.1 探索率衰减 (Epsilon Decay)
GLIE 条件 (Greedy in the Limit with Infinite Exploration):
- 所有状态-动作对被访问无限次
- 策略最终收敛到贪婪策略
常用指数衰减公式:
ϵ t = ϵ m i n + ( ϵ s t a r t − ϵ m i n ) ⋅ e − λ t \epsilon_t = \epsilon_{min} + (\epsilon_{start} - \epsilon_{min}) \cdot e^{-\lambda t} ϵt=ϵmin+(ϵstart−ϵmin)⋅e−λt
8.2 学习率衰减 (Alpha Decay)
Robbins-Monro 条件:
∑ t = 1 ∞ α t = ∞ , ∑ t = 1 ∞ α t 2 < ∞ \sum_{t=1}^\infty \alpha_t = \infty, \quad \sum_{t=1}^\infty \alpha_t^2 < \infty t=1∑∞αt=∞,t=1∑∞αt2<∞
第一个条件保证能克服初始偏差,第二个条件保证最终收敛。
9. 表格型方法的局限
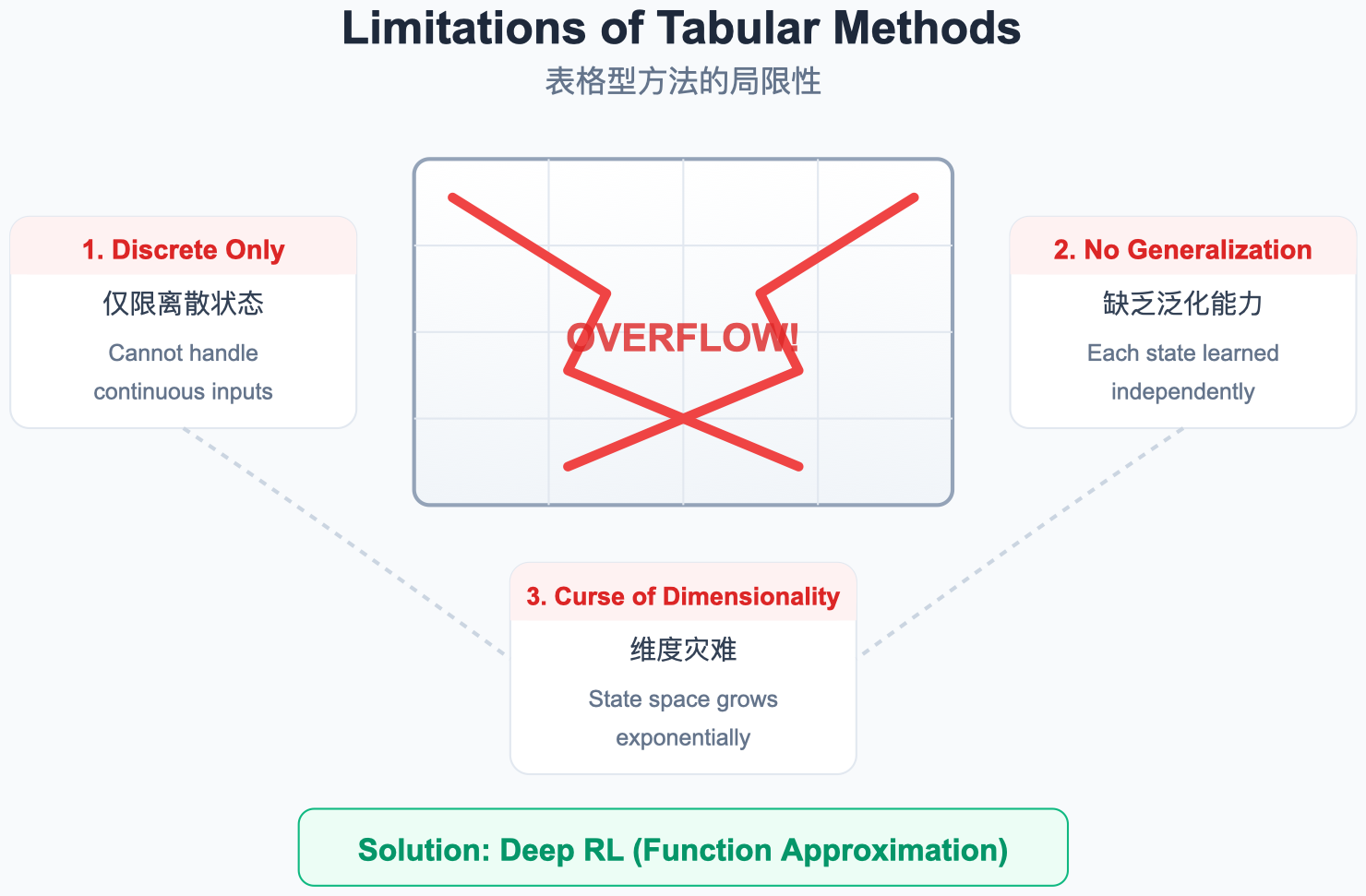
图解说明:
- 状态空间爆炸 :围棋棋盘 19x19,状态数 ≈ 3 361 \approx 3^{361} ≈3361,表格无法存储。
- 连续状态:机械臂关节角度是连续值,无法枚举。
- 解决方案:用神经网络来近似 Q 函数,即深度 Q 网络 (Deep Q-Network, DQN)。
10. 总结与预告
本章核心:
- On-policy vs Off-policy:行为策略和目标策略是否是同一个,决定了算法的风格和适用场景。
- SARSA:On-policy TD 控制,学到的策略会把探索的风险考虑在内,更"谨慎"。
- Q-Learning:Off-policy TD 控制,直接朝全局最优走,不管当前怎么探索。
- Expected SARSA:用期望替代单次采样,兼具两者优点,方差更低。
- Double Q-Learning:解耦"选动作"和"评估动作",解决 max 操作带来的系统性过估计。
下一章预告 :
表格型方法在大规模或连续状态空间下彻底失效。下一章我们进入深度价值学习,看 DQN 如何用神经网络逼近 Q 函数,以及它背后的核心创新。