二维平面下的 UWB 与 IMU 紧耦合定位导航系统仿真框架 ,采用扩展卡尔曼滤波(EKF)进行多源信息融合,采集的是IMU的加速度、角速度,UWB的TOA的距离信息
原创代码,禁止翻卖
文章目录
程序详解
该程序构建了一个二维平面下的 UWB 与 IMU 紧耦合定位导航系统仿真框架,采用扩展卡尔曼滤波(EKF)进行多源信息融合,实现:
- IMU高频惯性推算(100 Hz)
- UWB低频距离观测修正(10 Hz)
- 紧耦合状态估计
- 误差统计与性能评估
系统属于基于测距的非线性融合定位模型,典型应用场景包括室内定位、GNSS拒止环境下的移动机器人导航等。
系统结构示意
系统由三部分构成:
-
IMU模块
- 输出加速度
- 输出角速度
-
UWB模块
- 多锚点距离观测
- 非线性测距模型
-
EKF紧耦合融合模块
- 预测:惯性积分模型
- 更新:距离观测修正
紧耦合特征说明
该程序属于紧耦合(Tightly Coupled)融合结构,原因:
- EKF直接使用原始距离观测
- 未先进行UWB独立定位
- 状态由单一滤波器统一估计
对比松耦合:
| 类型 | 处理方式 |
|---|---|
| 松耦合 | UWB先解算位置,再融合 |
| 紧耦合 | 直接融合原始距离观测 |
仿真设置
-
仿真时长:20 s
-
IMU频率:100 Hz
-
UWB频率:10 Hz
-
锚点数量:5个
-
轨迹类型:
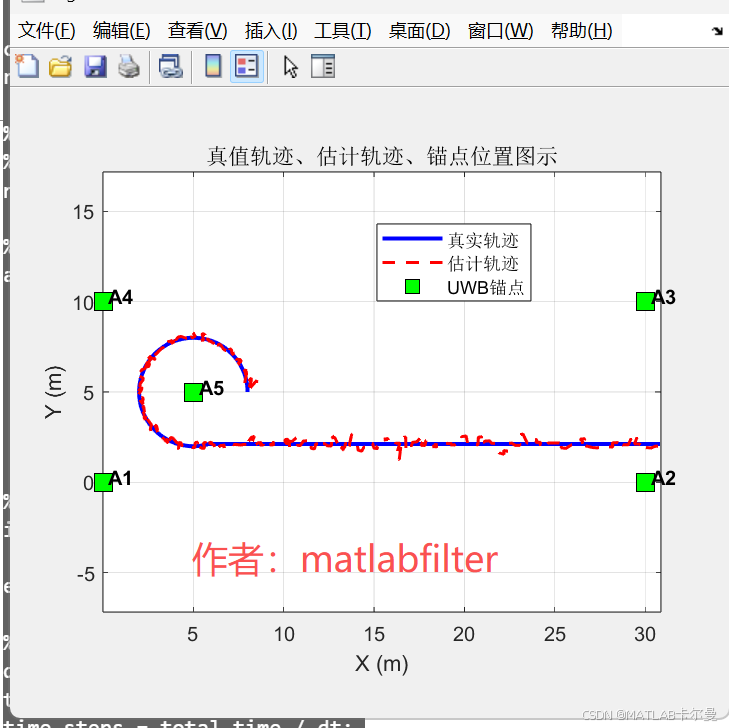
- 前10秒:圆周运动
- 后10秒:直线运动
这种轨迹组合用于验证:
- 曲线运动收敛性
- 直线段稳定性
- 观测缺失情况下的误差增长趋势
误差分析指标
程序输出:
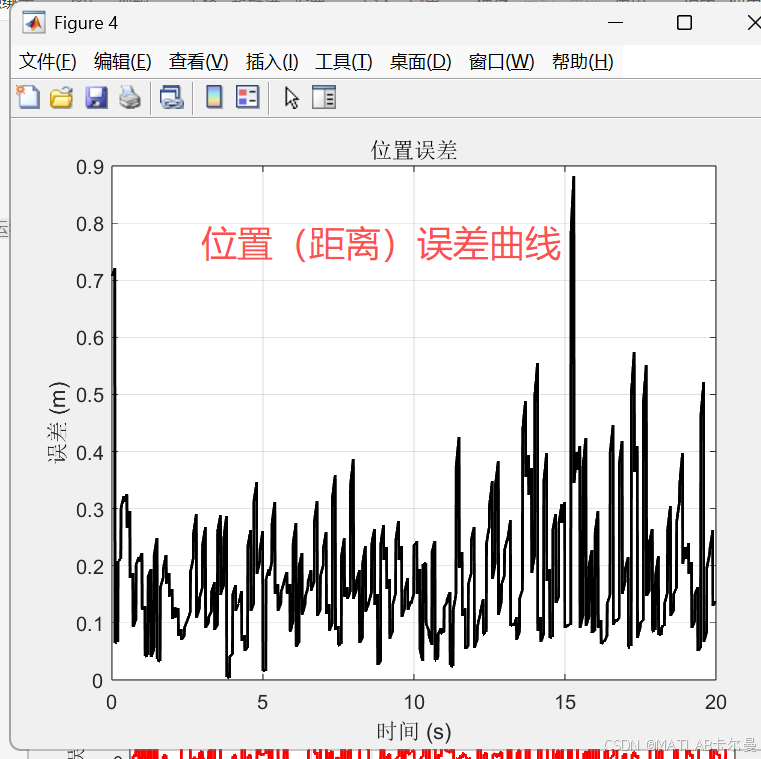
- 位置RMSE
- 最大误差
- 平均误差
- 标准差
并绘制:
- 轨迹对比图
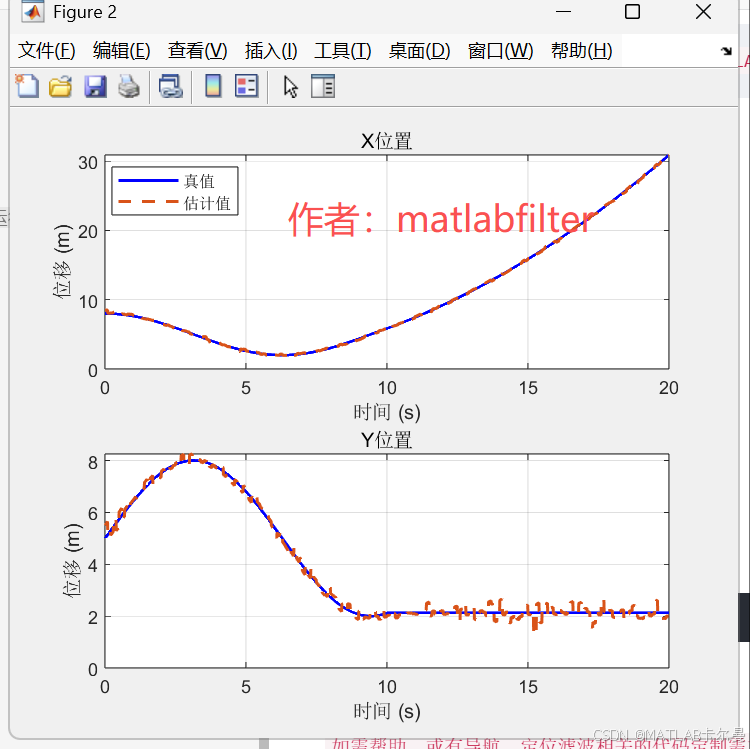
- 分量误差曲线
- 位置误差范数
运行结果
轨迹图示:
位移曲线:
位置误差曲线:
命令行输出的结果:
MATLAB源代码
完整代码如下:
matlab
%% UWB与IMU紧耦合定位导航系统,EKF做紧耦合,
% 作者:matlabfilter
% 2026-02-13/Ver1
clear; close all; clc;
rng(0);
%% ===参数初始化 ===
% 锚点数量(可修改,下方坐标的行数同步修改)
num_anchors = 5;
% UWB锚点坐标 [x, y] (每个锚点一行,先X和Y坐标)
anchor_positions = [
0, 0; % 锚点1
30, 0; % 锚点2
30, 10; % 锚点3
0, 10; % 锚点4
5, 5 % 锚点5
];
% 确保锚点数量与坐标匹配
if size(anchor_positions, 1) ~= num_anchors
error('锚点数量与坐标不匹配');
end
% 仿真参数
dt = 0.01; % 时间步长 (s)
total_time = 20; % 总仿真时间 (s)
time_steps = total_time / dt;
% 噪声参数
imu_acc_noise = 0.1; % IMU加速度噪声标准差 (m/s^2)
imu_gyro_noise = 0.1; % IMU角速度噪声标准差 (rad/s)
uwb_range_noise = 0.2; % UWB测距噪声标准差 (m)
%% == 生成真实轨迹
% 圆形+直线组合轨迹(可修改为其他轨迹)
t = 0:dt:total_time-dt;
true_trajectory = generate_trajectory(t);
true_trajectory.theta(true_trajectory.theta > pi) = true_trajectory.theta(true_trajectory.theta > pi) - 2*pi;代码获取:
如有一对一讲解或代码定制需求,请点击下方卡片联系作者