目录
1.摘要
针对灾害场景下无人机辅助应急通信网络中的关键节点(CNs)覆盖问题,本文提出了一种距离优化的关键节点感知(CNA)轨迹规划方法。为提高数据采集的时效性,采用信息时效(AoI)作为性能指标;结合Voronoi图分区与K-means聚类实现节点分布感知的空间划分,确保无人机集群的无碰撞路径规划。通过标量化方法优化轨迹,在最大化关键节点覆盖率的同时最小化AoI、飞行距离和总飞行时间。
2.系统模型
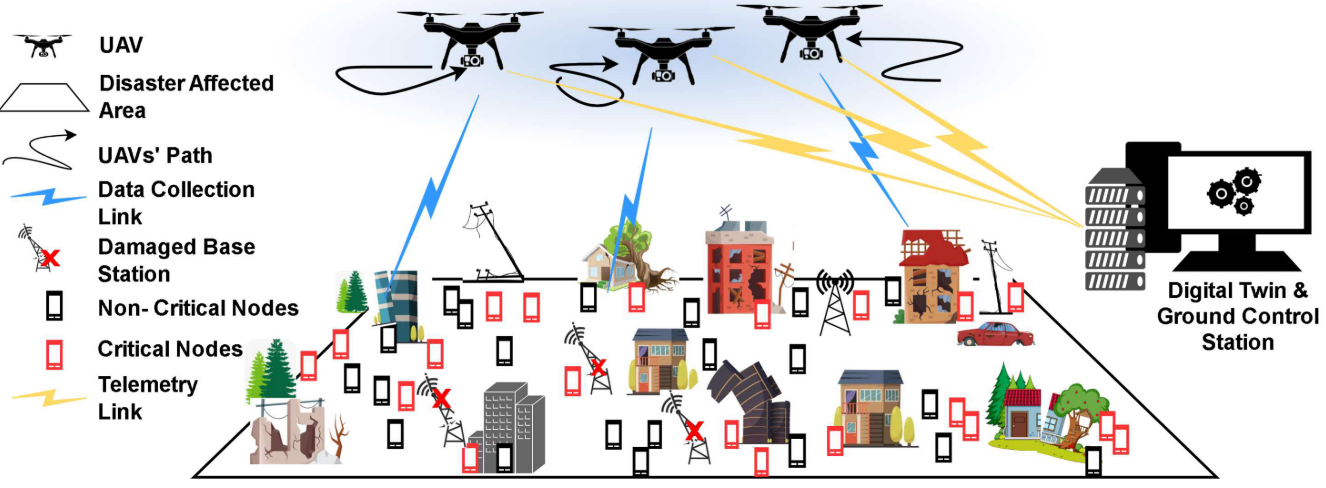
灾害区域内随机分布 N N N个地面源设备 (OSDs),其中关键节点 (CNs)数量为 N C N ⊆ N N_{CN}\subseteq N NCN⊆N。部署 M M M架无人机在固定高度 H H H作为空中基站进行数据采集,通过区域划分避免无人机间干扰。
UAV--OSD/CN 信道采用 Rician 衰落模型:
h n m = g n m Λ n m h_n^m=g_n^m\Lambda_n^m hnm=gnmΛnm
小尺度衰落:
g n m = K K + 1 g ˉ n m + 1 K + 1 g ~ n m g_{n}^{m}=\sqrt{\frac{K}{K+1}}\bar{g}{n}^{m}+\sqrt{\frac{1}{K+1}}\tilde{g}{n}^{m} gnm=K+1K gˉnm+K+11 g~nm
路径损耗:
Λ n m = δ 0 ( d n m ) − χ \Lambda_n^m=\delta_0(d_n^m)^{-\chi} Λnm=δ0(dnm)−χ
距离为:
d n m = ( x n − x m ) 2 + ( y n − y m ) 2 + ( H n − H m ) 2 \begin{aligned}d_n^m=\sqrt{(x_n-x_m)^2+(y_n-y_m)^2+(H_n-H_m)^2}\end{aligned} dnm=(xn−xm)2+(yn−ym)2+(Hn−Hm)2
当节点与无人机距离满足 d n m ≤ γ d_n^m\leq\gamma dnm≤γ则认为该节点被覆盖,单个 UAV 覆盖的关键节点:
C C N m = { 1 , d n m ≤ γ ∧ n ∈ C N 0 , o t h e r w i s e C_{CN}^m=\begin{cases}1,&d_n^m\leq\gamma\mathrm{~}\wedge\mathrm{~}n\in CN\\0,&\mathrm{otherwise}&&\end{cases} CCNm={1,0,dnm≤γ ∧ n∈CNotherwise
总覆盖关键节点数:
T C N = ∑ m = 1 M ∑ i = 1 N C C N , i m TCN=\sum_{m=1}^M\sum_{i=1}^NC_{CN,i}^m TCN=m=1∑Mi=1∑NCCN,im
未覆盖关键节点数:
U C N = ∣ N C N ∣ − T C N UCN=|N_{CN}|-TCN UCN=∣NCN∣−TCN
模型最大化关键节点覆盖数量:
m i n ( U C N ) \mathrm{min}(UCN) min(UCN)
在电池容量受限条件下,无人机的总飞行时间由飞行时间与悬停数据采集时间构成,其中飞行时间取决于悬停点之间的路径长度与飞行速度,悬停时间由关键节点的数据量与传输速率决定,多无人机场景下采用平均飞行时间衡量整体效率。引入信息时效(AoI)评估关键节点数据的新鲜度,其大小受到相邻悬停点之间飞行时间和当前悬停点数据采集时间的共同影响,并通过集群平均AoI衡量系统整体时效性能。
3.CNA无人机群系统
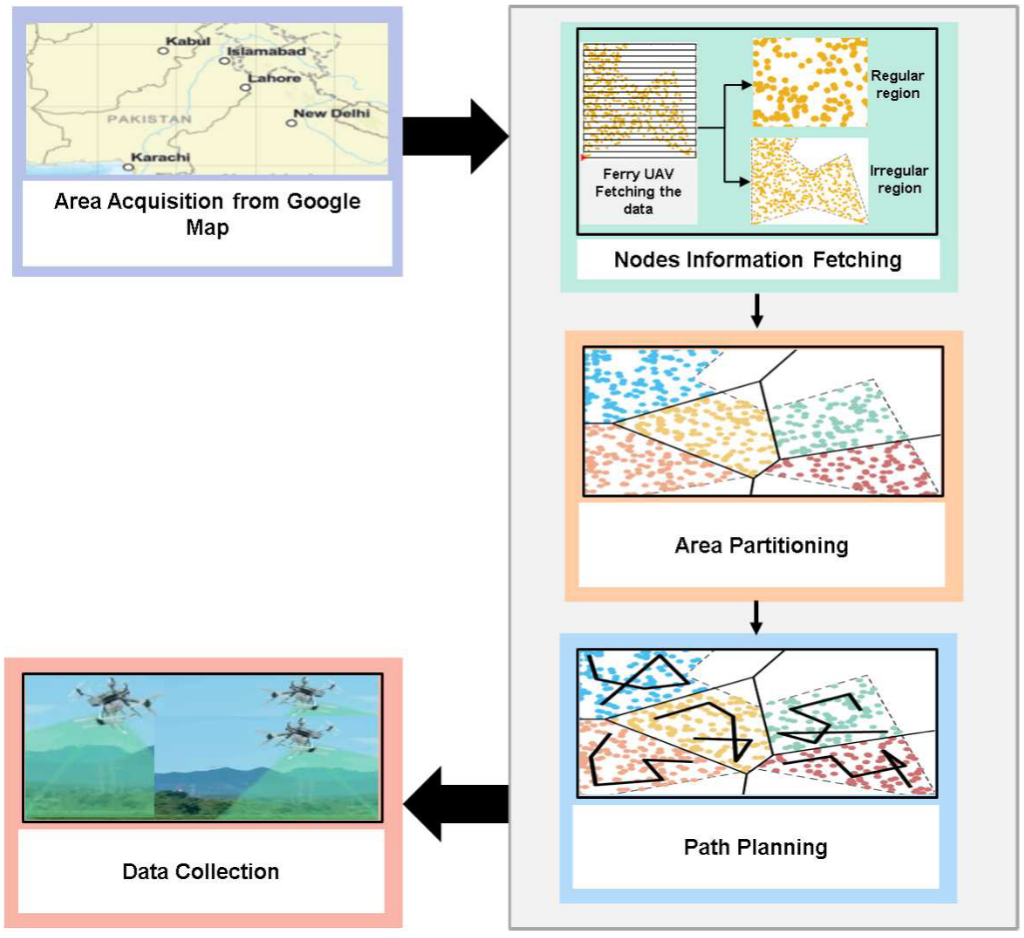
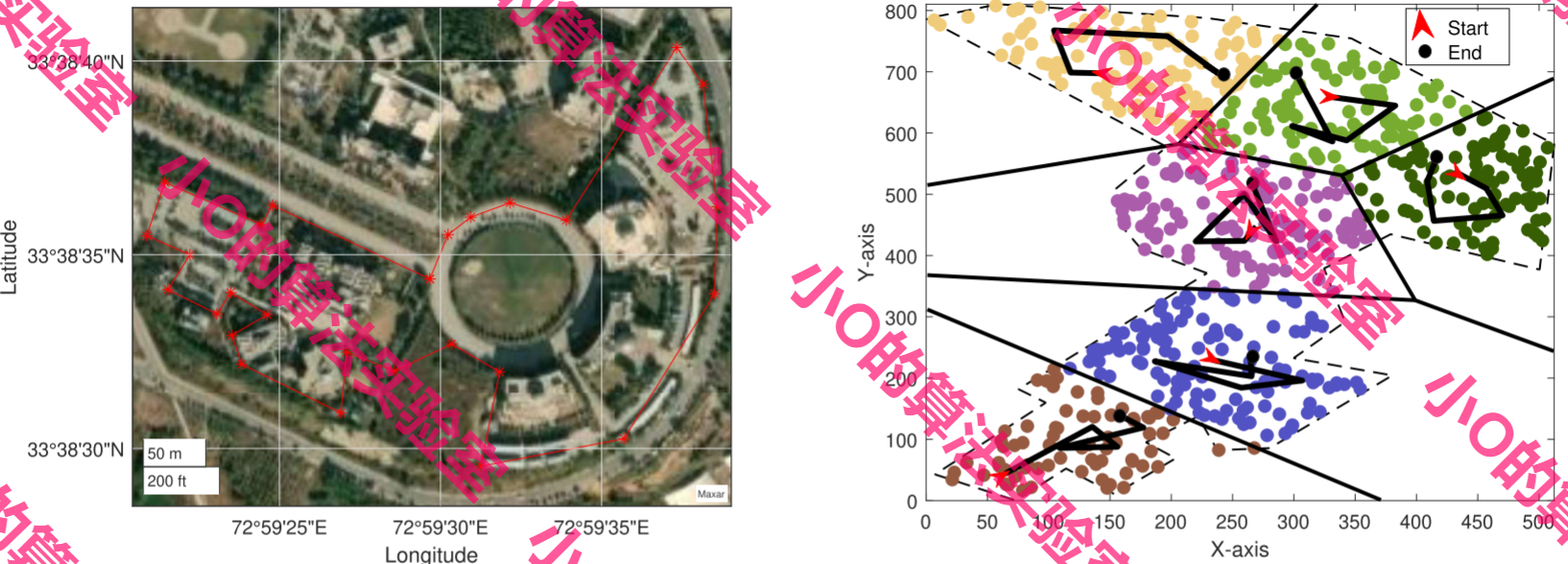
关键节点感知(CNA)无人机集群系统框架根据灾情信息确定目标区域范围,并将地图坐标转换与归一化处理;随后通过一架巡检无人机对灾区进行扫描,发现地面源设备(OSDs),收集其位置及信息状态,并上传至数字孪生与地面控制站建立全局态势感知。根据节点信息重要性将其划分为关键节点(CNs)与非关键节点,并针对不规则灾区形状计算区域面积。
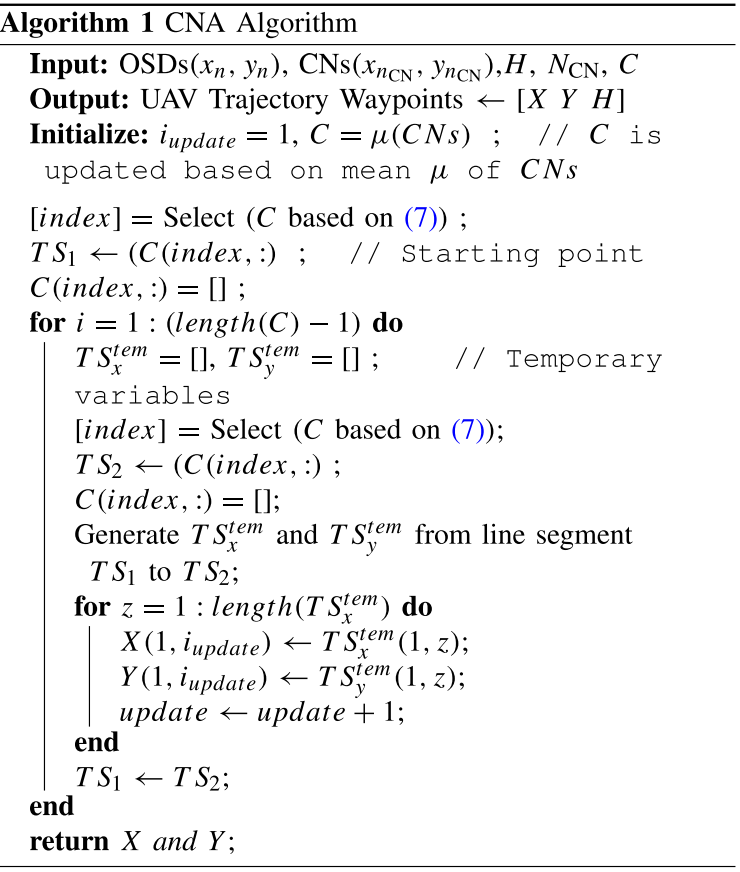
利用覆盖半径估算所需无人机数量,并通过 K-means 聚类确定种子点位置,结合 Voronoi 图将不规则灾区划分为多个互不重叠的子区域,使每架无人机负责一个子区域,从而实现空间解耦与分布式任务执行。各无人机从统一起点出发,按距离子区域质心远近顺序错时部署,以降低碰撞风险。子区域内通过聚类确定目标悬停点,并进行路径规划。
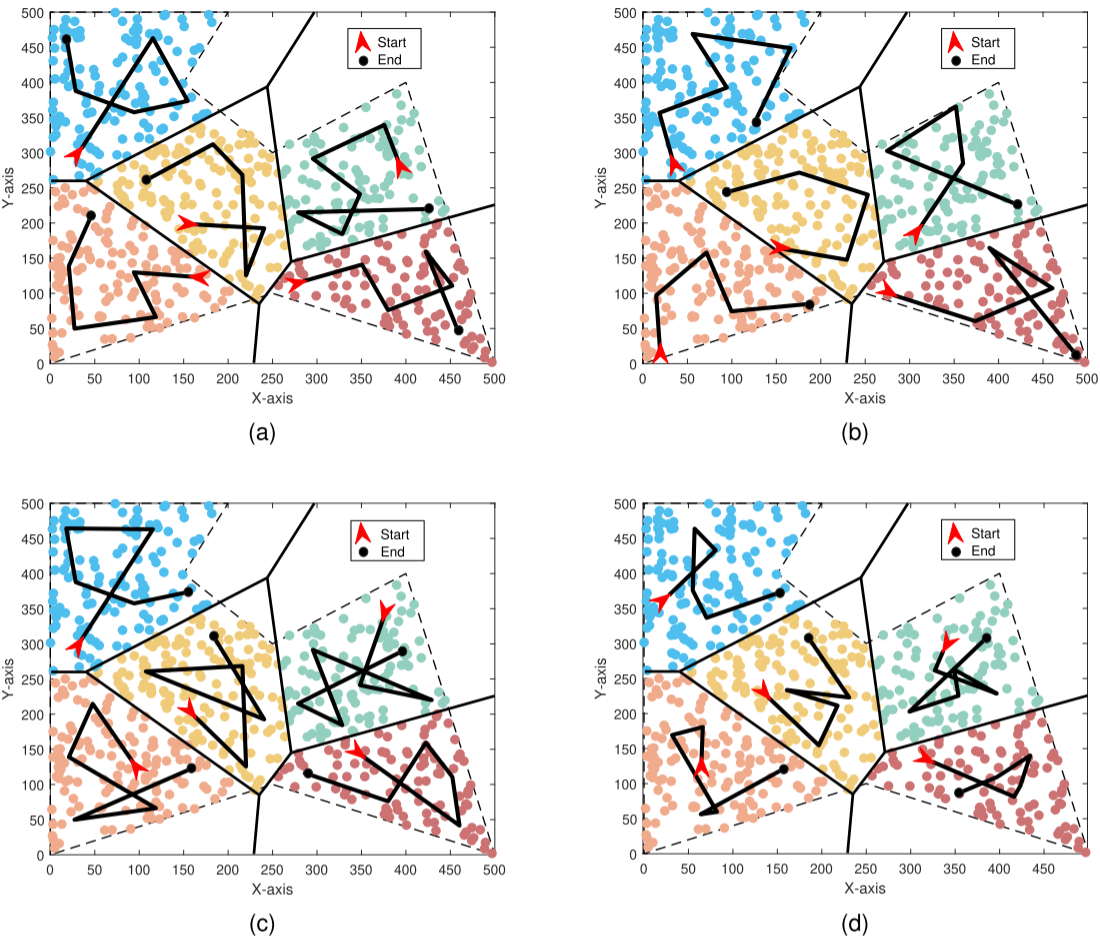
为评估性能,设置距离优先轨迹和优先级 TSP 轨迹作为基准方法:前者以最短飞行距离为目标依次访问目标点,后者优先访问关键节点以提升覆盖率。
4.结果展示
5.参考文献
1 Javed S, Ahmad R, Hassan A, et al. Critical Node-Aware UAV Swarm Path Planning in Disaster ZonesJ. IEEE Internet of Things Journal, 2025.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx