原创代码,请勿翻卖。包运行成功,用中文注释
文章目录
程序简介
本文介绍的程序是基于σ修正自适应律(Sigma-Modification Adaptive Law)的多无人机菱形编队控制仿真系统,MATLAB。用于验证在未知外部扰动条件下,多无人机协同编队飞行的稳定性与抗扰性能。系统以虚拟领航者(Virtual Leader)为参考,通过一致性控制与自适应补偿相结合的方法,实现多架无人机对目标编队结构的保持以及对复杂轨迹的协同跟踪。
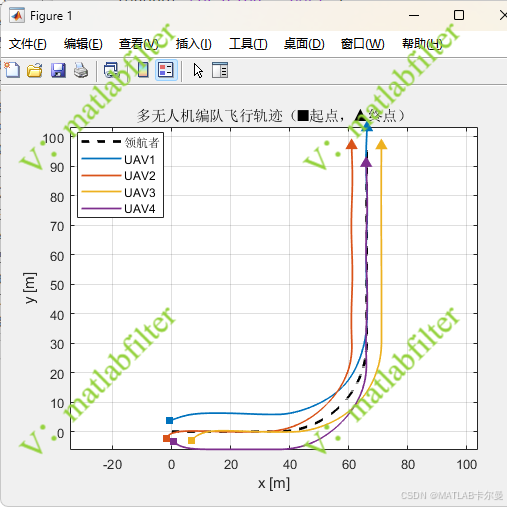
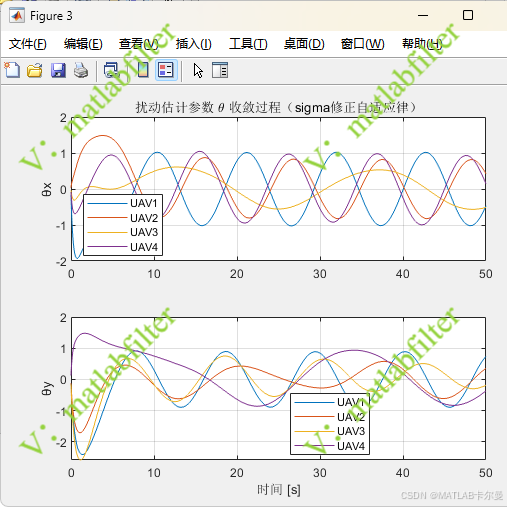
使用4架无人机(可调)采用菱形编队构型,并跟随虚拟领航者完成"直线飞行---圆弧转弯---直线飞行"的组合轨迹运动。控制器由前馈项、PD反馈项、邻居一致性耦合项以及自适应扰动补偿项构成。其中,一致性控制用于保证多无人机之间的协同收敛,而σ修正自适应律则用于在线估计未知时变扰动,提高系统在模型不确定性和外部干扰下的鲁棒性。
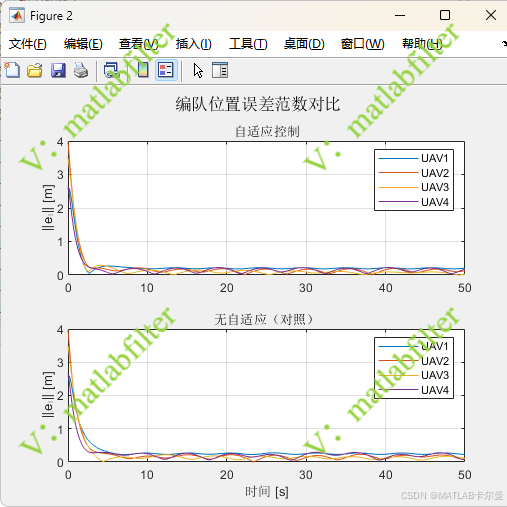
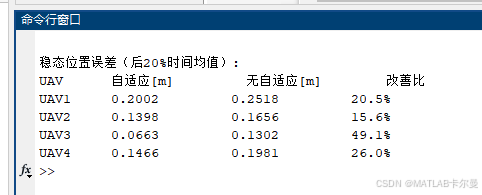
有"自适应控制"与"无自适应控制"两组对照实验,通过位置误差、稳态误差以及自适应参数收敛过程等指标,对比分析自适应补偿机制的实际效果。
该仿真适用于无人机协同控制、分布式一致性控制、自适应编队控制以及鲁棒控制等方向的教学、科研与算法验证,可作为多智能体协同导航与自主控制领域的基础实验平台。
运行结果
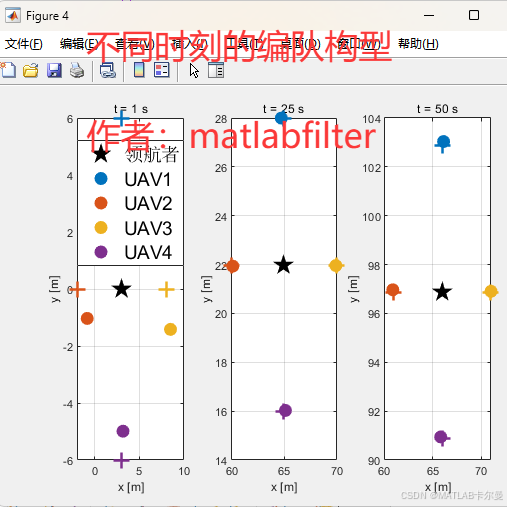
编队飞行轨迹:
各无人机位置误差范数对比(自适应 vs 无自适应):
扰动估计参数θ的收敛过程:
三个时刻的队形:
命令行里也会输出稳态误差的统计表:
MATLAB源代码
部分代码如下:
matlab
%% 基于σ修正自适应律的多无人机菱形编队控制仿真
% 控制目标:N架无人机保持菱形编队,跟随虚拟领航者(直线→圆弧→直线轨迹)
% 仿真同时对比"有自适应"与"无自适应"的稳态误差,展示自适应补偿的效果。
% 作者:matlabfilter(V同号,可联系咨询代码定制、讲解)
% 2026-05-29/Ver1
clear; clc; close all;
rng(0);
% 仿真基本参数
N = 4; % 无人机数量
dt = 0.02; % 积分步长 [s]
T = 50; % 总时长 [s]
t = 0:dt:T;
Ns = length(t);
% 编队队形:菱形(相对虚拟领航者的偏移量)[m]
H = [ 0 6; % UAV1:正前方
-5 0; % UAV2:左翼
5 0; % UAV3:右翼
0 -6]; % UAV4:正后方
% 控制器增益
% 闭环特征根(无扰):s² + Kd·s + Kp = 0,取 Kp=3.5, Kd=5.0
% 根为 s ≈ -0.84, -4.16,均在左半平面,满足Hurwitz稳定条件
Kp = 3.5; % 位置误差增益
Kd = 5.0; % 速度误差增益
Kc = 0.8; % 邻居一致性耦合增益完整代码:
https://download.csdn.net/download/callmeup/92919595
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者