基于 YOLOv8 的水体污染目标检测系统 目标检测完整源码
一、背景:水体监控为什么需要"计算机视觉"?
在水资源保护与环境治理领域,"看得见问题"往往是治理的第一步。然而在真实场景中,水体监控长期面临以下现实挑战:
- 水域面积大、人工巡检成本高
- 污染物种类多、形态变化大
- 人工判读主观性强、难以量化
- 传统传感器难以识别"视觉型污染"
随着无人机、高清摄像头、遥感设备的普及,水体数据获取已不再是瓶颈,真正的难点转移到了如何从海量影像中自动识别污染风险。
基于此,本文介绍一套 以 YOLOv8 为核心的水体环境智能监控系统 ,通过目标检测技术,实现对水域中多类污染目标的自动识别、标注与可视化展示,为环保监管提供可落地的技术方案。 
源码下载与效果演示
哔哩哔哩视频下方观看: www.bilibili.com/video/BV1Zr...  包含:
包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本
二、系统整体设计思路
在项目设计阶段,我们并未将目标简单定义为"训练一个检测模型",而是从实际使用场景出发,构建一个完整可运行的工程系统。
2.1 系统功能定位
该系统面向以下典型应用场景:
- 无人机航拍水面巡检
- 水利站固定摄像头长期监控
- 环保执法现场快速取证
- 遥感影像污染初筛
因此,系统需要同时具备 检测能力、交互能力与工程稳定性。
2.2 系统架构分层
整体采用典型的三层结构:
swift
┌─────────────────────────┐
│ 表现层(UI) │ PyQt5 可视化界面
├─────────────────────────┤
│ 推理与业务逻辑层 │ YOLOv8 推理引擎
├─────────────────────────┤
│ 数据与模型层 │ 数据集 / 权重
└─────────────────────────┘这种分层设计的优势在于:
- 模型可独立升级,不影响界面
- 输入源变化,不影响核心算法
- 便于后期拓展云端或嵌入式部署


三、水体污染检测任务的技术挑战
与常见的行人、车辆检测相比,水体污染检测在视觉层面具有明显特殊性。
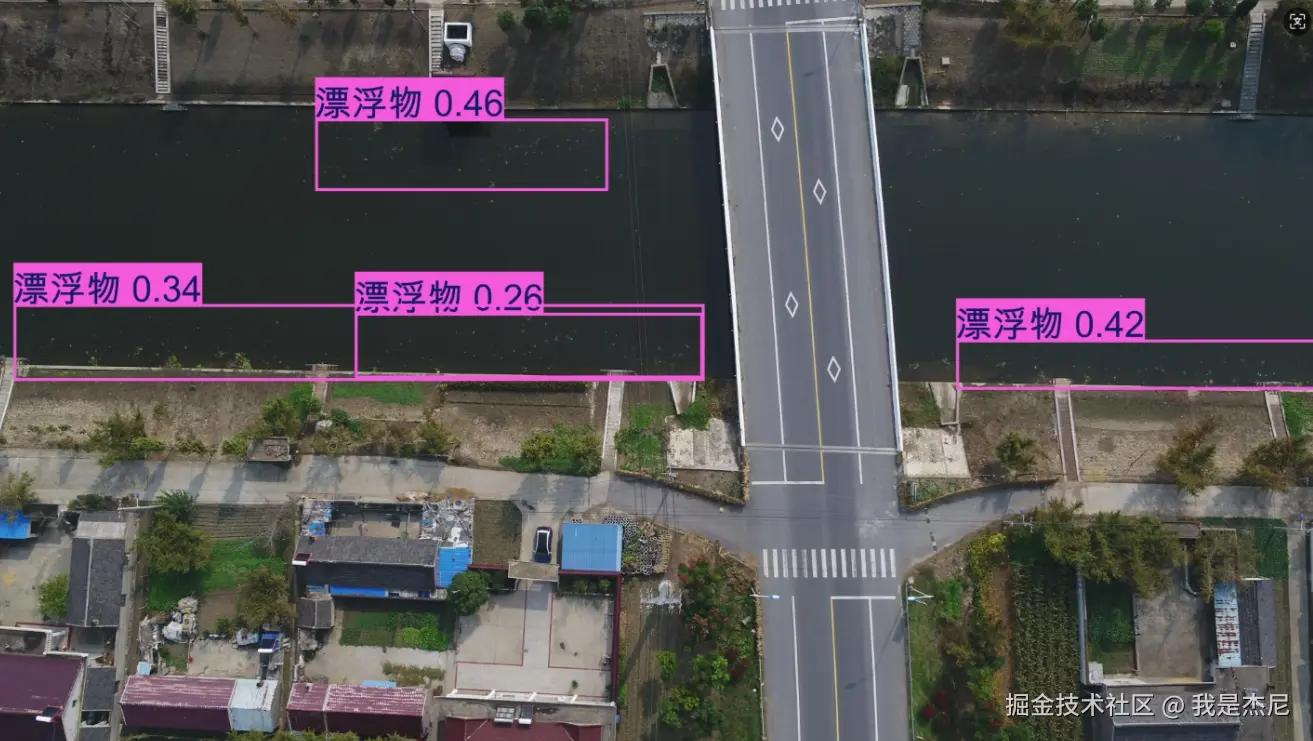
3.1 检测目标复杂且不规则
本项目涉及的目标类别包括:
- 水面废弃物(塑料、泡沫、垃圾袋等)
- 废弃船只(形态差异大)
- 水污染区域(油污、异常水色)
- 漂浮物(水草、藻类聚集)
- 捕鱼养殖设施
这些目标往往:
- 边界不清晰
- 颜色与背景高度相似
- 尺寸跨度大
3.2 环境干扰因素多
- 水面反光
- 天气变化(阴雨、雾霾)
- 波纹与浪花干扰
这对模型的泛化能力提出了较高要求。 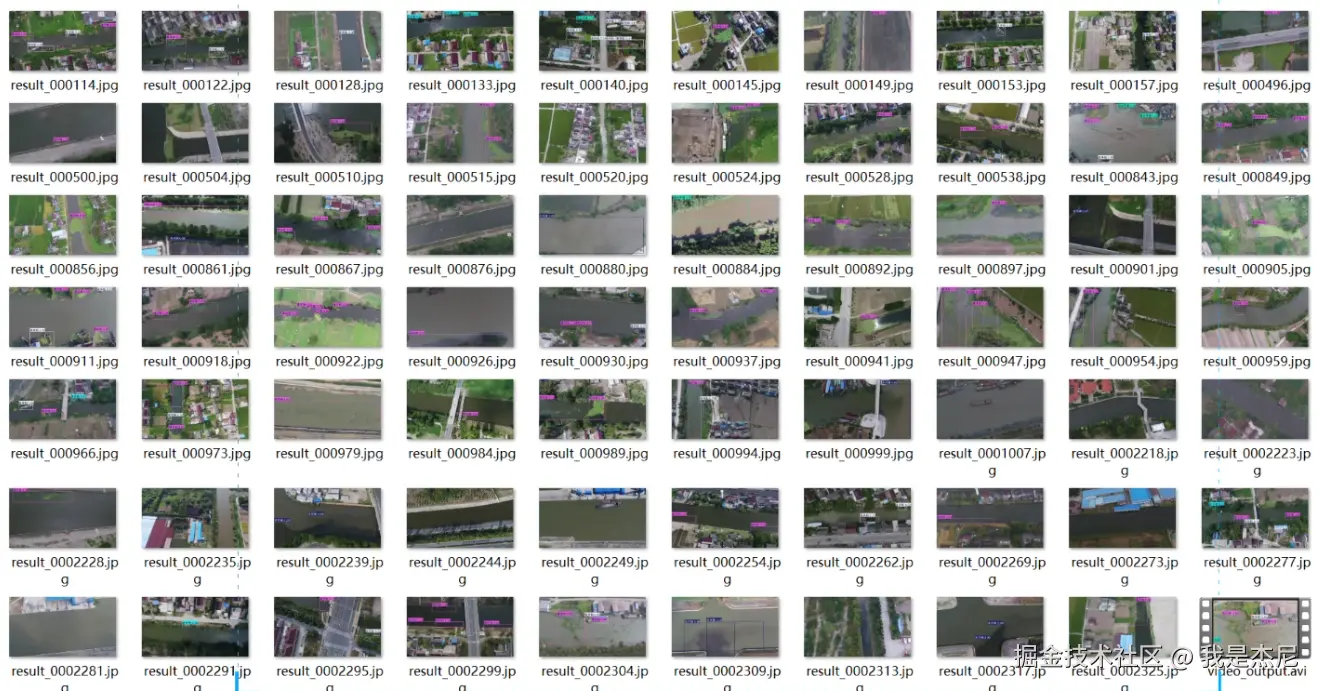
四、为何选择 YOLOv8 作为核心检测模型?
4.1 YOLOv8 的结构优势
YOLOv8 作为 Ultralytics 推出的新一代目标检测模型,在工程实践中表现出以下优势:
-
Anchor-Free 架构 对目标尺度变化更友好,减少人工调参
-
Task-Aligned Assigner 提升正负样本分配质量,在复杂背景下更稳定
-
推理速度快 非常适合实时水域监控场景
4.2 与水体监控场景的匹配度
在多次实验中,YOLOv8 在以下方面表现突出:
- 对小尺寸漂浮物仍具备较好召回率
- 在复杂水面纹理下误检率可控
- 模型轻量,适合边缘设备部署

五、数据集构建与训练流程设计
5.1 数据组织方式
采用标准 YOLO 数据集结构:
kotlin
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/这种结构的好处在于:
- 可直接复用 Ultralytics 官方训练脚本
- 易于后期扩充新类别
- 支持自动化数据增强
5.2 标注策略说明
每个检测目标使用以下格式描述:
arduino
class_id x_center y_center width height在水污染区域标注中,通常以"区域主体"为目标进行框选,而非追求像素级精度,从而兼顾标注效率与检测效果。
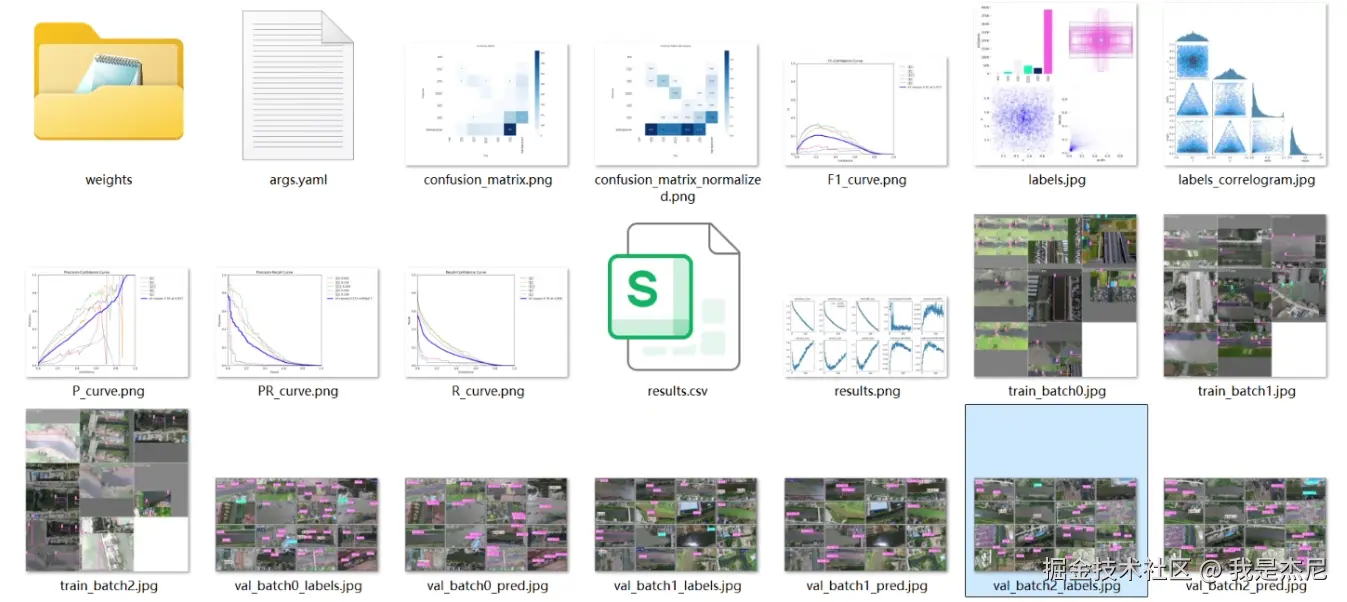
5.3 训练过程关注点
在实际训练中,重点关注:
- mAP@0.5 的稳定性
- 混淆矩阵中相似类别的误判情况
- loss 曲线是否平稳收敛
当模型在验证集上达到可接受精度后,即可进入系统集成阶段。
六、统一推理接口的工程实现
为避免不同输入方式重复开发逻辑,系统在推理层进行了统一封装。
6.1 推理流程抽象
无论输入来源如何,处理流程统一为:
- 获取当前帧
- 调用 YOLOv8 模型预测
- 解析检测结果
- 渲染并返回结果
6.2 推理核心代码示例
python
from ultralytics import YOLO
model = YOLO("best.pt")
results = model(
source=frame,
conf=0.25,
device=0
)
for det in results[0].boxes:
cls_id = int(det.cls)
score = float(det.conf)
x1, y1, x2, y2 = map(int, det.xyxy[0])通过这种方式,系统可以无缝支持图片、视频与实时摄像头。
七、PyQt5 可视化界面的设计与落地
7.1 图形界面的价值
对于环保部门或水利单位而言,系统的价值不仅在于"识别出来",更在于:
- 是否能直观看到问题
- 是否能快速切换监控方式
- 是否能保存结果用于取证
PyQt5 的引入,使算法真正具备"可使用性"。
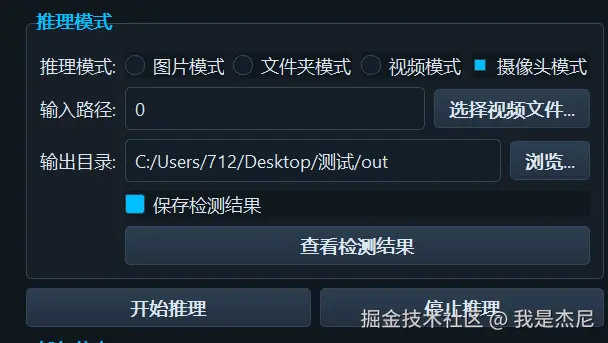
7.2 核心界面功能
- 多输入源选择
- 实时画面显示
- 检测结果与置信度叠加
- 自动保存检测结果
界面逻辑与算法逻辑分离,保证系统长期运行的稳定性。
八、部署与扩展能力分析
8.1 实际部署优势
- 模型体积小,加载速度快
- 支持 CPU / GPU 多环境
- 可结合无人机、边缘计算盒子使用
8.2 可扩展方向
在现有系统基础上,可进一步扩展:
- 水污染面积统计
- 时间序列变化分析
- 云端集中监控平台
- GIS 系统联动
九、总结:从算法到治理工具的关键一步
本项目并非单纯的目标检测实验,而是一次面向真实水环境治理需求的工程化实践。通过将 YOLOv8 的检测能力与 PyQt5 的交互界面相结合,系统实现了从"看图识别"到"智能监控工具"的转变。
其核心价值体现在:
- 用 AI 降低人工巡检成本
- 用视觉数据辅助科学决策
- 用工程化系统推动技术落地
对于从事计算机视觉开发的工程师,这是一个理解 AI 如何走向实际应用 的典型案例; 对于环保与水利相关领域,该方案同样提供了一条低成本、可扩展的智能化升级路径。
本文围绕水体环境治理这一典型的现实需求,系统性地介绍了一个基于 YOLOv8 的水体污染智能监控解决方案。从应用背景出发,逐步阐述了系统架构设计、模型选型原因、数据集构建、训练与推理流程,以及 PyQt5 可视化界面的工程实现方式。该项目不仅验证了 YOLOv8 在复杂水面场景下对废弃物、污染区域、漂浮物等目标的良好检测能力,也通过完整的软件形态提升了算法的可用性与落地价值。整体来看,该方案兼顾技术先进性与工程实用性,为水环境监测、环保执法及无人机巡检等场景提供了一条可复用、可扩展的智能化实现路径。