STM32F103C8T6驱动SRF05超声波测距传感器程序
本项目基于 STM32F103C8T6 微控制器,构建了一套高精度、实时性的超声波测距系统,用于驱动 SRF05 超声波测距传感器。系统采用72MHz主频运行,通过定时器实现1μs级时间分辨率,对ECHO脉冲宽度进行精确计时,从而计算声波往返传播时间,并完成厘米级距离换算。程序基于标准外设库 stm32f10x.h 构建,结合GPIO高速推挽输出与定时器计数机制,实现对TRIG触发信号的精确控制及对ECHO信号的稳定采集。同时加入超时保护机制,有效避免异常环境下的阻塞风险,增强系统鲁棒性与工程可靠性。
一、完整代码
SRF05 超声波测距传感器驱动程序头文件(SRF05.h)
c
#ifndef __SRF05_H
#define __SRF05_H
#include "stm32f10x.h"
// 引脚定义
#define SRF05_TRIG_PORT GPIOA
#define SRF05_TRIG_PIN GPIO_Pin_1
#define SRF05_ECHO_PORT GPIOA
#define SRF05_ECHO_PIN GPIO_Pin_2
void SRF05_Init(void);
float SRF05_GetDistance(void);
#endifSRF05 超声波测距传感器驱动程序(SRF05.c)
c
#include "SRF05.h"
#include "Delay.h"
static void TIM2_Init(void);
#define ECHO_TIMEOUT_US 30000UL
#define TRIGGER_US 12
void SRF05_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitStructure.GPIO_Pin = SRF05_TRIG_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SRF05_TRIG_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = SRF05_ECHO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(SRF05_ECHO_PORT, &GPIO_InitStructure);
TIM2_Init();
GPIO_ResetBits(SRF05_TRIG_PORT, SRF05_TRIG_PIN);
}
static void TIM2_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_Cmd(TIM2, ENABLE);
}
float SRF05_GetDistance(void)
{
uint32_t start_time;
uint32_t pulse_width = 0;
uint8_t echo_started = 0;
GPIO_ResetBits(SRF05_TRIG_PORT, SRF05_TRIG_PIN);
Delay_us(3);
GPIO_SetBits(SRF05_TRIG_PORT, SRF05_TRIG_PIN);
Delay_us(TRIGGER_US);
GPIO_ResetBits(SRF05_TRIG_PORT, SRF05_TRIG_PIN);
TIM_SetCounter(TIM2, 0);
start_time = TIM_GetCounter(TIM2);
while (GPIO_ReadInputDataBit(SRF05_ECHO_PORT, SRF05_ECHO_PIN) == 0)
{
if ((TIM_GetCounter(TIM2) - start_time) > ECHO_TIMEOUT_US)
{
return -1.0f;
}
}
TIM_SetCounter(TIM2, 0);
start_time = TIM_GetCounter(TIM2);
while (GPIO_ReadInputDataBit(SRF05_ECHO_PORT, SRF05_ECHO_PIN) == 1)
{
pulse_width = TIM_GetCounter(TIM2);
if (pulse_width > ECHO_TIMEOUT_US)
{
pulse_width = ECHO_TIMEOUT_US;
break;
}
}
float distance_cm = (float)pulse_width * 0.0172f;
if (distance_cm < 2.0f || distance_cm > 450.0f)
{
return -1.0f;
}
return distance_cm;
}主程序文件(main.c)
c
#include "stm32f10x.h"
#include "SRF05.h"
#include "Delay.h"
volatile float distance;
int main(void)
{
SRF05_Init();
while (1)
{
distance = SRF05_GetDistance();
Delay_ms(60);
}
}二、硬件说明
HY-SRF05超声波测距模块是一款高性能的非接触式距离传感器,能够提供2cm至450cm的测量范围,测距精度可高达3mm,最大测量角度15°。该模块集成了超声波发射器、接收器以及控制电路,工作原理简洁可靠:使用IO口向TRIG引脚发送至少10μs的高电平信号触发测距,模块随后自动发出8个40kHz的超声波方波,并检测是否有回波返回;若检测到回波,则通过ECHO引脚输出一个高电平脉冲,该高电平持续的时间即为超声波从发射到返回的往返时间。通过公式"测试距离 = (高电平时间 × 声速340m/s) ÷ 2"即可计算出目标物体与模块之间的实际距离。
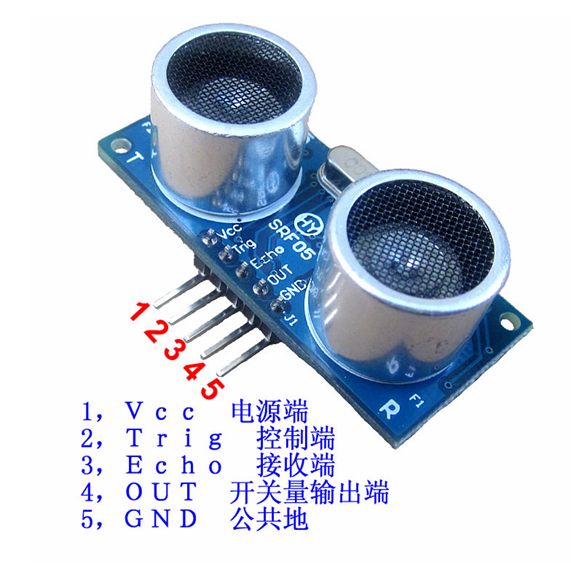 引脚功能定义图
引脚功能定义图 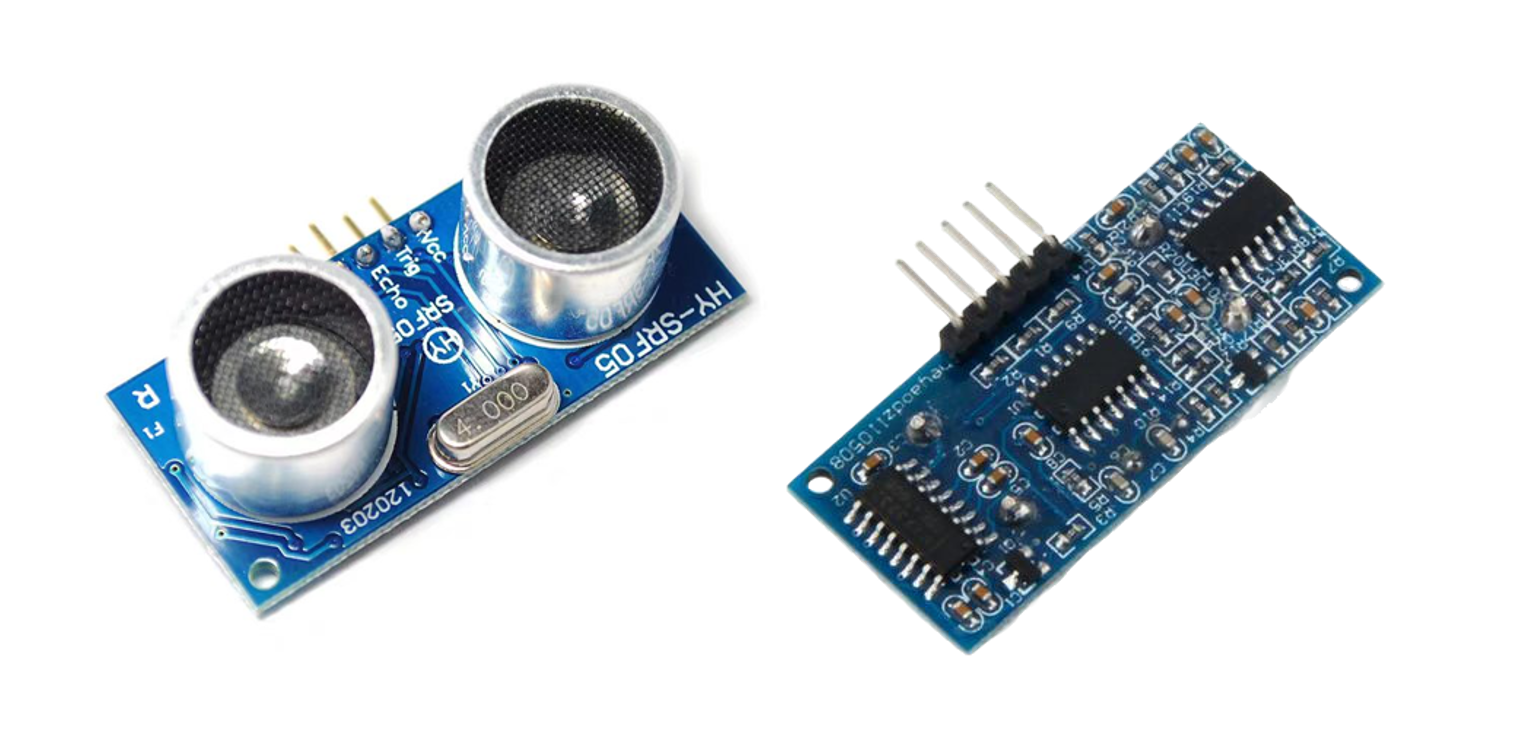 硬件实物图
硬件实物图 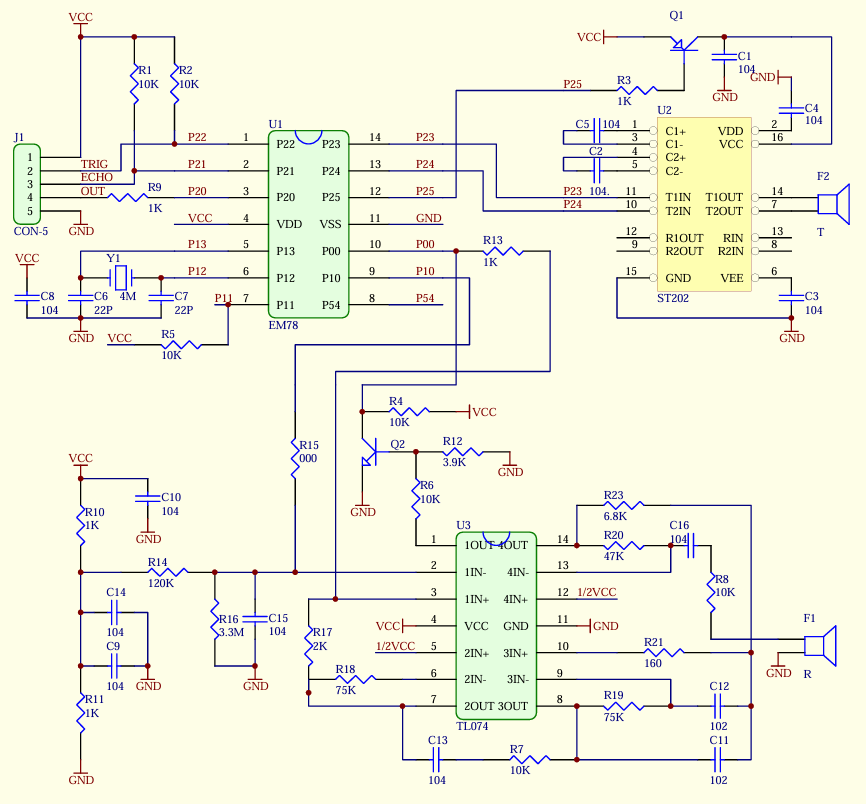 硬件模块原理图
硬件模块原理图
三、实物操作演示
硬件接线
- V C C V_{CC} VCC:连接5V
- GND:连接GND
- TRIG:连接PA1
- ECHO:连接PA2
OUT引脚是开关量输出,它属于报警/开关模式下的功能,主要用于独立使用模块(不接微控制器)时做简单阈值判断或报警。
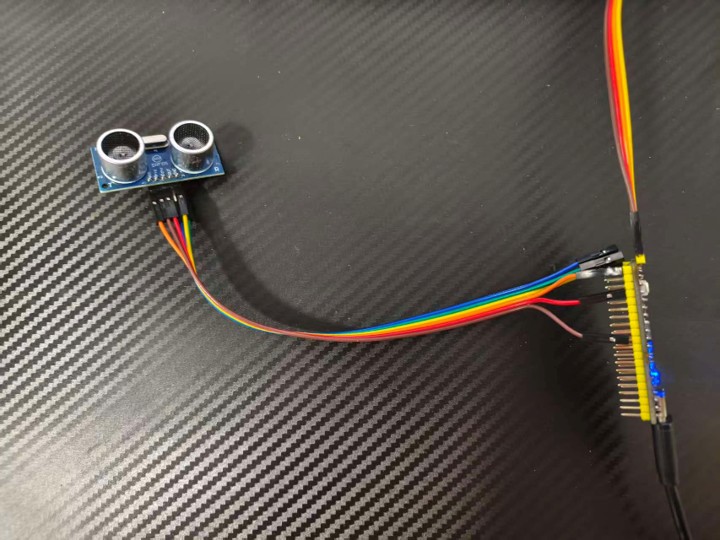 实物连接图
实物连接图
编译调试
编译并下载程序至单片机中
打开调试,在Watch 1窗口可以看到距离数据。
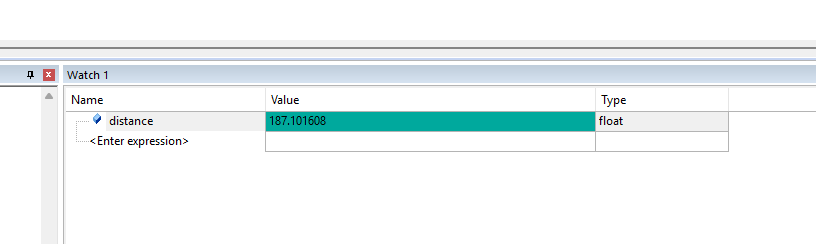 调试数据输出
调试数据输出
结束~
例程资源: https://download.csdn.net/download/hsdujdjrjrj/92680023