Rotor
转子块计算旋转螺旋桨或转子在三维空间中产生的气动力和力矩。该模块允许你在前进飞行时,将襟翼运动引起的旋翼盘倾斜效应,对产生的力和力矩影响也包含在内。 旋翼块考虑了轴向和横向流动通过旋翼盘的影响,这对于分析旋翼机系统至关重要。该模块的基石是经典旋翼空气动力学,它根据当前的飞行状态实时输出机体坐标系下的三轴受力。
1. 基础拉力与扭矩方程
模块内部计算总拉力 的标准公式为:
其中:为拉力系数
为当前空气密度
为旋翼半径
为旋翼转速
2. 考虑桨叶挥舞效应(Flap Motion)
在悬停或纯垂直爬升时,受力极其简单;但在前飞状态下,前行桨叶和后退桨叶的相对气流速度不同,会导致桨叶上下挥舞,从而使整个旋翼气动锥体发生倾斜。
在静态拉力完全沿 Z 轴负方向,力矩仅包含反扭矩。
考虑挥舞效应:模块会实时计算纵向挥舞角 和横向挥舞角
,并据此将推力矢量在 X 和 Y 轴上进行投影分量计算
3.工作模式
为了兼顾计算速度和仿真保真度,Rotor 模块提供了两种获取拉力/扭矩系数的方式,你可以在配置面板中进行切换
模式A:如果你已经通过地面试车台完成了拉力曲线的二次多项式拟合,你可以直接将算好的静态常数输入给模块。
模式B:就是在线计算拉力与扭矩,这是该模块的"高保真"模式。如果勾选此项,模块会将桨叶沿径向切分成无数个微元,结合动量定理实时积分计算系数。
4.输入输出端口
输入端口
:旋翼的转速,可以给出电机命令,然后由计算得出
:空气密度,通常由大气环境模块提供。
:当前机体在空间中的平动速度和旋转角速度
输出端口
:输出一个 3 维向量,代表该旋翼在机体坐标系下产生的总合力。
:输出一个 3 维向量,代表总力矩(包含反扭矩以及可能的挥舞力矩)。
5.应用
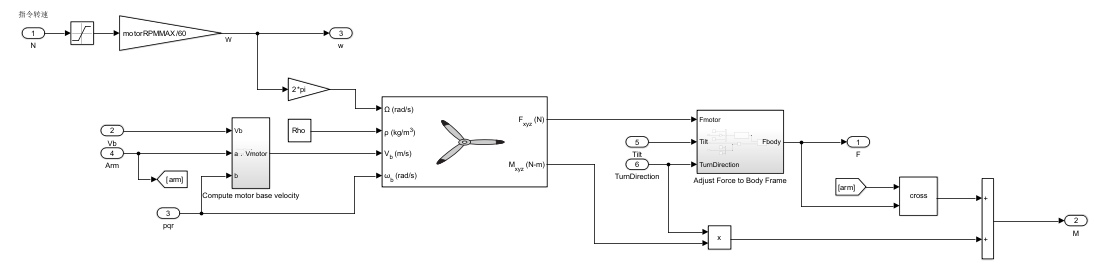
N为电机输出的PWM指令,限幅模块将 范围从 0.1-1之间,增益模块将输出换为每秒转速,为166.67,增益模块 2*pi将转速从Hz换算为弧度每秒,提供给启动模块使用。
来流风速 :输入Vb,pqr,Arm为机体线速度,机体角速度,和旋翼安装力臂。计算电机基座速度是因为无人机的旋翼再机臂末端,除了整体的前飞速度外,还有一个额外的线速度
核心空气动力学解算:他接收当前转速,空气密度,机体角速度,局部来流风速,也就是平动速度,输出旋翼自身坐标系。
Adjust Force to Body Frame:将力调整到机体坐标系
总力矩合成:
旋翼自身的气动反扭矩 : 将 Rotor 模块输出的 乘以 TurnDirection
升力产生的偏置力矩:推力作用在机臂末端,会对重心产生巨大的力矩。叉乘模块接收力臂向量和转换后的机体坐标系受力,根据物理公式 计算出偏置力矩
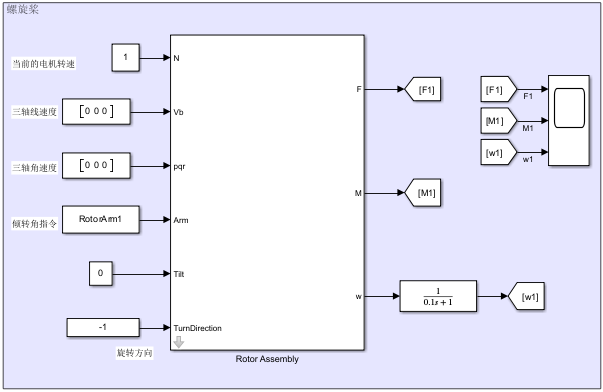
我们对该模块进行测试,假设在无风环境下,给满电机的转速,可得
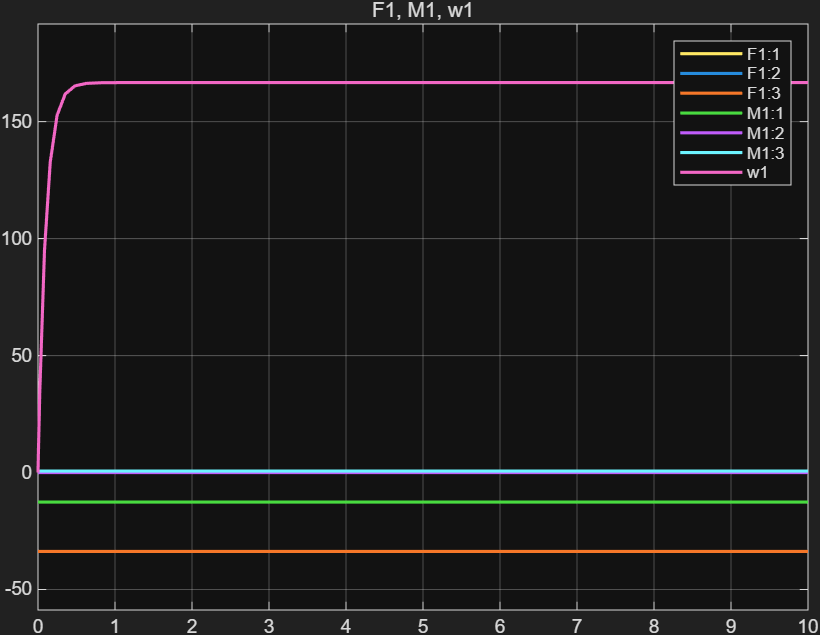
由于力臂的存在,会出现X方向的力矩,同时为NED的坐标,因此Z方向的力矩也是朝上的,因此在这为负数。