【ROS2】Mac M4 虚拟机 Ubuntu 24.04 安装 ROS2 Jazzy 新手教程
- 1、系统准备
-
- [1.1、安装 Ubuntu 24.04 LTS](#1.1、安装 Ubuntu 24.04 LTS)
- [1.2、Ubuntu 系统设置](#1.2、Ubuntu 系统设置)
- [2、安装 ROS2 jazzy](#2、安装 ROS2 jazzy)
-
- 2.1、安装基础工具
- [2.2、添加 ROS 软件源](#2.2、添加 ROS 软件源)
- [2.3、安装 ROS2](#2.3、安装 ROS2)
- [2.4、设置 ROS2 环境变量](#2.4、设置 ROS2 环境变量)
- [2.5、ROS2 安装验证](#2.5、ROS2 安装验证)
- [2.6、卸载 ROS2](#2.6、卸载 ROS2)
- 3、开发环境设置
1、系统准备
1.1、安装 Ubuntu 24.04 LTS
M4虚拟机软件很多,诸如Parallels Desktop(收费)、OrbStack(免费)、UTM(免费)等,桌面仿真推荐PD;终端推荐OrbStack,以下是两款工具的对比,可以按需选择。
| 对比项 | Parallels Desktop(PD) | OrbStack |
|---|---|---|
| 核心定位 | 完整虚拟机,全系统支持 | 轻量容器 + Linux 终端虚拟机 |
| 桌面 GUI | ✅ 完整支持(Windows/macOS/Linux 桌面) | ❌ 仅 Linux 终端,无桌面 |
| 启动速度 | 慢(数十秒) | 极快(<2 秒) |
| 资源占用 | 高(内存 GB 级) | 极低(内存 <300MB) |
| 支持系统 | Windows/macOS/Linux/BSD 全系统 | 仅 Linux(终端)+ Docker 容器 |
| 文件共享 | 无缝融合模式 | 自动挂载,性能优秀 |
| 网络 | 桥接 / NAT/host 等多种模式 | 自动端口映射、host 网络 |
| 价格 | 商业付费(订阅 / 永久) | 个人免费,商业付费 |
| 适用人群 | 全场景、需要桌面、多系统用户 | 开发者、命令行、容器 / DevOps 场景 |
(1)PD一键安装 桌面版 Ubuntu 24.04 LTS
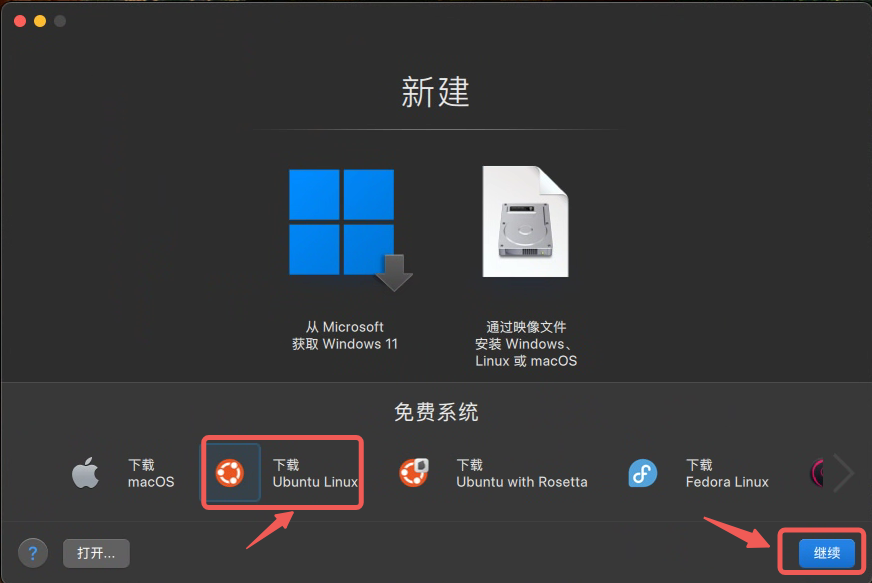
点击继续、下载即可,
下载完成直接进入系统登录界面
(2)OrbStack一键安装 终端版 Ubuntu 24.04 LTS
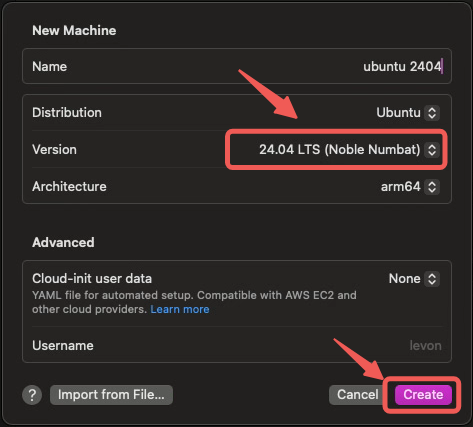
点击 Create,即可开始下载并自动安装
1.2、Ubuntu 系统设置
(1)设置系统编码为 UTF-8
查看系统编码
bash
locale
echo $LANG # en_US.UTF-8以上虚拟机默认已经是 UTF-8,
如果其他方式安装的,不存在或系统编码不符合的,可以通过以下命令来安装并进行设置:
bash
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8(2)设置系统软件源
查看系统架构
bash
uname -m
aarch64输出结果参考以下表格:
| 架构类型 | 常见输出值 | 适用场景 / 说明 |
|---|---|---|
| x86(32 位) | i386/i486/i586/i686 | 老旧 32 位 x86 处理器(如早期 Intel/AMD 处理器),现代系统几乎不再使用 |
| x86_64(64 位) | x86_64/amd64 | 主流 64 位 x86 架构(Intel Core/AMD Ryzen 处理器),Linux/macOS/Windows 通用 |
| ARM 32 位 | armv6l/armv7l | 树莓派 1/2/Zero(armv6l)、树莓派 3/4 32 位系统(armv7l),l 表示小端序 |
| ARM 64 位 | aarch64/arm64 | 树莓派 4/5 64 位系统、M1/M2/M3 Mac、ARM 服务器(如 AWS Graviton)、安卓手机 |
| PowerPC | ppc/ppc64/ppc64le | IBM Power 服务器,le 表示小端序 |
| MIPS | mips/mips64/mipsel | 嵌入式设备、路由器(如小米路由器),el 表示小端序 |
| RISC-V | riscv64 | 新兴开源架构(如香橙派 RISC-V 开发板),目前主要是 64 位版本 |
| SPARC | sparc/sparc64 | Sun/Oracle 服务器,小众架构 |
| Alpha | alpha | DEC 老旧服务器架构,几乎淘汰 |
因为M4本身是ARM64架构,所以在它上面虚拟的Ubuntu也是ARM64架构的。
设置ARM64位专用的阿里云软件源(对应 ubuntu-ports ):
bash
sudo tee /etc/apt/sources.list << 'EOF'
deb http://mirrors.aliyun.com/ubuntu-ports/ noble main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu-ports/ noble-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu-ports/ noble-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu-ports/ noble-backports main restricted universe multiverse
EOF附:X86_64位的阿里云源(对应 ubuntu )
bash
sudo tee /etc/apt/sources.list << 'EOF'
deb http://mirrors.aliyun.com/ubuntu/ noble main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ noble-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ noble-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ noble-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ noble-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ noble main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ noble-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ noble-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ noble-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ noble-backports main restricted universe multiverse
EOF注意:以上源一定不能混用,必须要区分核心架构。
更新系统
bash
sudo apt update
sudo apt upgrade -y2、安装 ROS2 jazzy
2.1、安装基础工具
bash
sudo apt install curl gnupg lsb-release2.2、添加 ROS 软件源
bash
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null2.3、安装 ROS2
bash
sudo apt update
sudo apt upgrade -y
sudo apt install ros-jazzy-desktop -y # RViz + rqt + TF2 + 基础库
sudo apt install ros-jazzy-desktop-full -y # desktop + Gazebo 全套仿真环境做机器人仿真(导航、SLAM、机械臂),必装 full。
2.4、设置 ROS2 环境变量
查看当前shell类型
bash
echo $SHELL
/bin/bash(1)如果你使用 bash
bash
# 对所有终端有效,写入终端启动前执行的配置文件,每次启动终端自动执行
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
source ~/.bashrc(2)如果你使用 zsh
bash
echo "source /opt/ros/jazzy/setup.zsh" >> ~/.zshrc
source ~/.zshrc2.5、ROS2 安装验证
bash
# 查看 ROS2 命令
ros2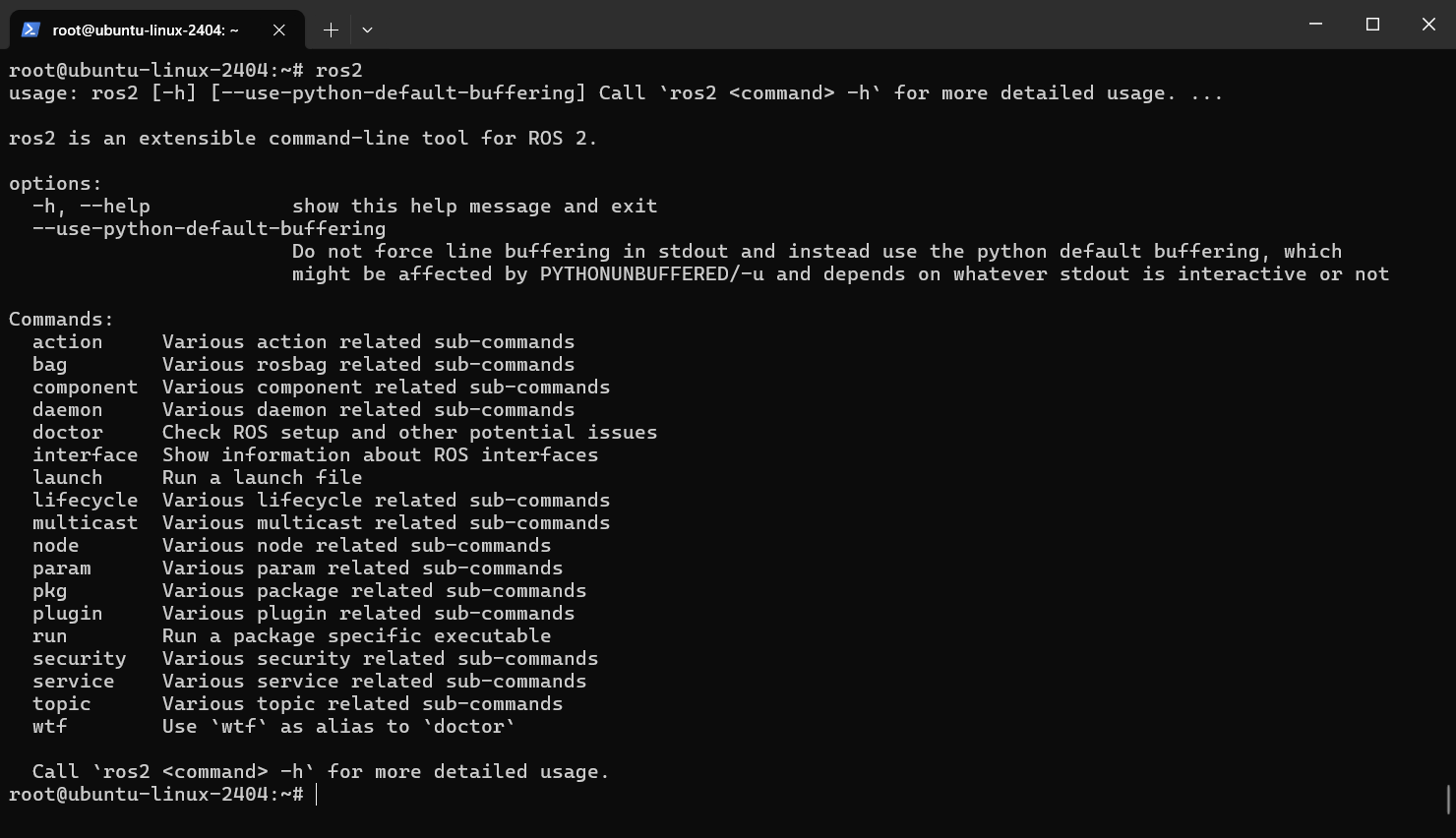
bash
# 运行官方示例:消息发布/订阅测试(必须两个终端)
ros2 run demo_nodes_cpp talker # 发布消息:Hello World:序号
ros2 run demo_nodes_cpp listener # 订阅消息:Hello World:序号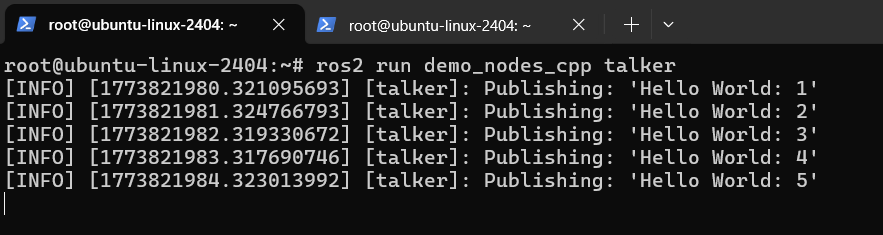

bash
# 小海龟移动测试(必须在桌面端,运行两个终端)
ros2 run turtlesim turtlesim_node # 显示小海龟
ros2 run turtlesim turtle_teleop_key # 鼠标控制小海龟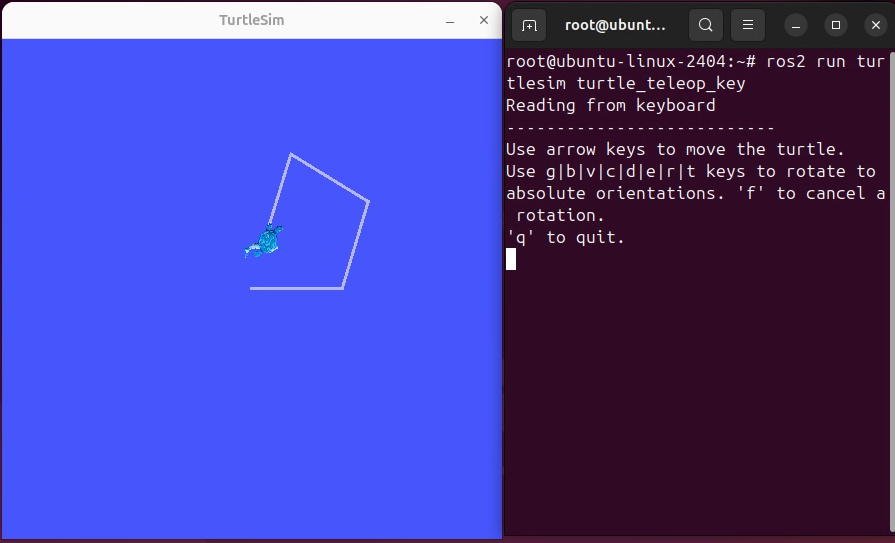
至此,ROS2 已经安装成功。
2.6、卸载 ROS2
bash
sudo apt remove ros-jazzy-* -y
sudo apt autoremove -y
sudo rm /etc/apt/sources.list.d/ros2.list3、开发环境设置
3.1、创建工作空间
工作空间(workspace)是一个存放工程开发相关文件的文件夹。
- src:代码空间(Source Space),功能包里的源码、脚本等。
- build:编译空间(Build Space),编译过程产生的中间文件,不用管。
- install:安装空间(Install Space),编译完成之后产生的可执行文件、脚本。
- log:日志空间(Log Space),编译过程中以及后续运行过程中产生的各种日志信息。
bash
mkdir -p ~/Workspace/dev_ws/src # 创建src目录
cd ~/Workspace/dev_ws/src
# 下载胡春旭老师的教程
git clone https://gitee.com/guyuehome/ros2_21_tutorials.git3.2、安装依赖
bash
sudo apt install -y python3-pip
# 国内工具rosdepc替代rosdep,解决国外网络依赖
sudo pip3 install rosdepc
# 报错则执行以下命令:
sudo pip3 install rosdepc --break-system-packages
# 更新环境
$ sudo rosdepc init
$ rosdepc update
$ cd .. # 回退到src上级目录中
# 搜索当前src目录,自动安装所需依赖
$ rosdepc install -i --from-path src --rosdistro jazzy -y3.3、编译工作空间
colcon 是一个命令行工具,用于改进编译、测试和使用多个软件包的工作流程。它实现过程自动化,处理需求并设置环境以便于使用软件包。ROS2 中便是使用 colcon 作为包构建工具的,但是 ROS2 中没有默认安装 colcon,需要自行安装,安装命令如下:
bash
# 首先安装编译工具
sudo apt install python3-colcon-ros
# 在工作空间目录,进行编译
colcon build # 编译过程生成另外三个目录:build install log3.4、设置工作空间环境变量
bash
echo "source ~/Workspace/dev_ws/install/local_setup.sh" >> ~/.bashrc3.5、创建功能包
bash
cd src
ros2 pkg create <package_name> --build-type <bulid-type>