目录
相机标定的意义在于在三维世界与二维平面之间建立映射关系,标定解决了"像素如何对应物理尺寸的问题"。
相机的标定主要是为了求得相机的三个重要参数,内参"焦距,主点",外参"旋转矩阵R,平移向量t","畸变系数"。下面对三个重要参数做详细的介绍。
一.相机的内参(焦距,主点)
内参是描述相机的内部本身的物理特性和光学特性,每一个相机的内参都是固定的。内参包括焦距和主点,它们构成了内参矩阵 KK,用于将相机坐标系下的三维点投影到图像平面上。
1.1焦距
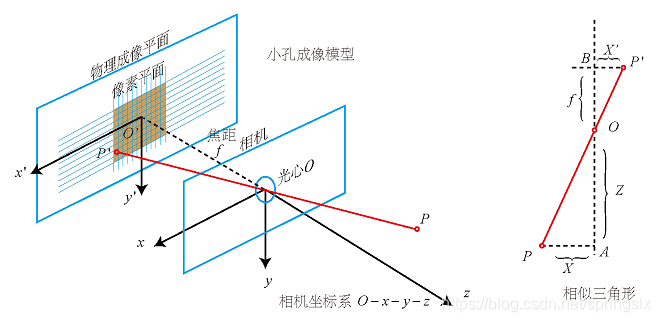
在理想的针孔相机模型中,焦距 f是光心(投影中心)到图像平面的距离。在实际相机中,由于像素可能不是正方形,以及传感器可能经过缩放,通常使用两个不同的焦距参数:
-
fx:以像素为单位的水平方向焦距。它与物理焦距 f(单位:毫米)和单个像素在水平方向的物理尺寸 dx(毫米/像素)的关系为 fx=f/dx。
-
fy:以像素为单位的垂直方向焦距。类似地,fy=f/dy,其中 dy 是像素在垂直方向的物理尺寸。
焦距描述了相机将三维空间中的角度变化转换为图像平面上的位移的能力。焦距越大,视场角越小,相同距离的物体在图像上成像越大。
1.2主点
主点 (cx,cy)是光轴与图像平面的交点(理论上的图像中心)在像素坐标系中的坐标。在实际传感器中,由于制造误差或图像传感器安装偏差,主点通常不在图像的正中心。它表示图像坐标系的原点偏移量。
1.3内参矩阵
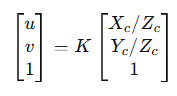
将上述参数组合成内参矩阵 KK(齐次坐标形式):
给定相机坐标系中的一点 Pc=(Xc,Yc,Zc)T,其在图像平面上的归一化坐标(假设无畸变)为 (x,y)=(Xc/Zc,Yc/Zc),再通过内参矩阵转换为像素坐标 (u,v):
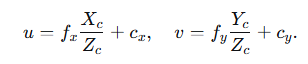
或等价的投影方程:
二.相机的外参(旋转矩阵R,平移向量t)
外参描述相机在世界坐标系中的位置和朝向,包括旋转矩阵 R和平移向量 t。它们将世界坐标系中的点变换到相机坐标系。
2.1旋转矩阵
旋转矩阵 R是一个 3×3的正交矩阵(满足 R=I,det(R)=1),表示从世界坐标系到相机坐标系的旋转。其每一列是相机坐标轴在世界坐标系中的方向向量,或每一行是世界坐标轴在相机坐标系中的表示。旋转矩阵有3个自由度(通常用欧拉角或旋转向量表示)。
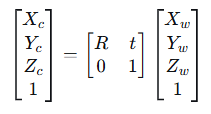
给定世界坐标系中的点 Pw=(Xw,Yw,Zw),其在相机坐标系下的坐标 Pc 为:
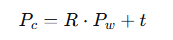
其中t是平移向量。
2.2平移向量
平移向量 t=(tx,ty,tz)T 是世界坐标系原点在相机坐标系中的坐标(或者说是从相机坐标系原点到世界坐标系原点的向量,取决于约定)。它表示两个坐标系之间的平移关系。
2.3外参的其次表示
通常将旋转和平移合并为一个 3×4 的外参矩阵 R∣t:
三.畸变系数
实际相机的镜头并非理想的针孔模型,通常存在光学畸变(在光线通过镜片时发生折射,导致成像不符合理想的小孔成像模型),导致图像失真。畸变系数用于描述这些非线性畸变,主要包括径向畸变 和切向畸变。
3.1径向畸变
径向畸变是由镜头形状引起的,光线离中心越远弯曲越严重。它使直线在图像边缘变成曲线。径向畸变分为:
-
桶形畸变:图像点向中心收缩(常见于广角镜头)。
-
枕形畸变:图像点向外扩张(常见于长焦镜头)。
径向畸变模型通常用多项式描述:
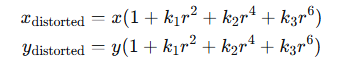
其中 (x,y) 是归一化平面上的理想坐标(已去除内参影响),r2=x2+y2,k1,k2,k3是径向畸变系数(通常 k3 仅用于高畸变镜头)
3.2切向畸变
切向畸变是由于镜头与图像传感器不完全平行(装配误差)引起的。它使图像点沿切线方向偏移。切向畸变模型:

其中 p1,p2是切向畸变系数。
3.3畸变系数的整体作用
在相机标定中,我们首先将世界点转换到相机坐标系,然后投影到归一化平面得到理想坐标 (x,y)(x,y),接着应用畸变模型得到畸变后的坐标 (xd,yd)(xd,yd),最后通过内参矩阵得到像素坐标 (u,v)(u,v)。
畸变系数描述的相机特性:畸变系数刻画了镜头的光学缺陷和装配误差导致的非线性失真。它们是对针孔模型的修正,使投影模型更接近真实相机。通过标定得到这些系数后,可以对图像进行去畸变处理,恢复正确的几何关系。
总结
相机的成像过程可以分解为三步:
-
世界坐标系 → 相机坐标系:由外参(旋转矩阵 R 和平移向量 t)完成,描述相机的位置和朝向。
-
相机坐标系 → 归一化图像坐标系:理想透视投影,得到 (x,y)=(Xc/Zc,Yc/Zc)。
-
加入畸变:用畸变系数 (k1,k2,k3,p1,p2) 修正归一化坐标。
-
归一化图像坐标系 → 像素坐标系:由内参(焦距 fx,fy 和主点 cx,cy)完成,将物理坐标转换为像素坐标。
内参、外参和畸变系数共同构成了完整的相机模型,它们是计算机视觉中三维重建、视觉定位、增强现实等应用的基础。通过相机标定(例如张正友标定法),可以从多幅已知棋盘格图像中精确求解这些参数。