本文将介绍如何利用 OpenCV (cv2) 和 NumPy 对图像进行一系列操作:
-
调整图像尺寸并旋转
-
使用 Canny 算法进行边缘检测
-
提取最大轮廓并生成掩模
-
利用掩模提取原图中的目标区域并保存
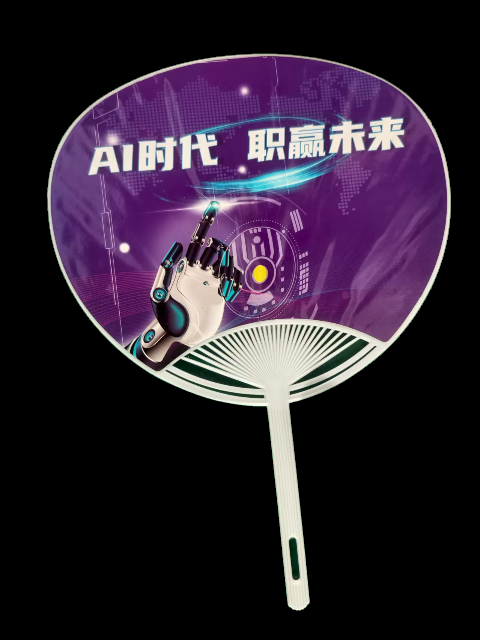
我们将以下面这张图作为示例,目标是提取图像中最大的物体区域,并保存成一张新图片

导入库 + 读取图片 + 预处理
python
# 1. 导入需要的库
import cv2
import numpy as np
# -------------------------- 读取并预处理图片 --------------------------
# 读取图片(把路径换成你自己的图片路径)
img = cv2.imread(r"C:\Users\LEGION\Desktop\fba8f805b62cae66c6579969abeb86d8.jpg")
# 检查图片是否读取成功(非常重要!)
if img is None:
raise FileNotFoundError("图片读取失败,请检查路径是否正确!")
# 统一调整图片大小:宽640,高480
img_resized = cv2.resize(img, (640, 480))
# 逆时针旋转90度(让扇子摆正,方便检测)
img_rotated = cv2.rotate(img_resized, cv2.ROTATE_90_COUNTERCLOCKWISE)
# 显示效果
cv2.imshow("1-原图预处理后", img_rotated)
cv2.waitKey(0)
cv2.destroyAllWindows()整尺寸 resize()
- 统一图片大小,降低计算量,保证处理稳定
旋转图片 rotate()
-
ROTATE_90_COUNTERCLOCKWISE= 逆时针 90 度 -
作用:让扇子摆正,边缘检测更准确
注意:
-
旋转方向要明确,如果写成
cv2.ROTATE_90_CLOCKWISE就会顺时针旋转。 -
缩放先于旋转,可以避免旋转后图像尺寸不一致导致的裁切问题。
Canny 边缘检测(核心步骤)
python
# -------------------------- Canny边缘检测 --------------------------
# 1. 转为灰度图(边缘检测必须用灰度图)
gray = cv2.cvtColor(img_rotated, cv2.COLOR_BGR2GRAY)
# 2. 高斯模糊:去噪点(边缘检测前必做)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
# 3. Canny边缘检测
edges = cv2.Canny(blurred, 50, 150)
# 显示结果
cv2.imshow("2-灰度图", gray)
cv2.imshow("3-模糊后", blurred)
cv2.imshow("4-Canny边缘结果", edges)
cv2.waitKey(0)
cv2.destroyAllWindows()-
灰度化
cvtColor-
彩色图有 3 个通道,灰度图只有 1 个通道
-
Canny 边缘检测只接受灰度图
-
-
高斯模糊
GaussianBlur-
(5,5)是模糊核大小(必须奇数) -
作用:消除噪点,防止把噪点当成边缘
-
-
Canny 边缘检测
-
50:低阈值 ------ 小于这个值的边缘会被抛弃 -
150:高阈值 ------ 大于这个值的边缘会被保留 -
标准比例:1:2 或 1:3
-
运行后你会看到:扇子变成白色线条,背景黑色,这就是边缘。
提示:阈值可以调节,低阈值太小会有噪声,太大会丢失细节。
查找轮廓 + 版本兼容处理
python
# -------------------------- 查找轮廓(兼容所有OpenCV版本) --------------------------
# 查找轮廓
contour_result = cv2.findContours(
edges.copy(),
cv2.RETR_EXTERNAL, # 只找最外层轮廓
cv2.CHAIN_APPROX_SIMPLE
)
# 版本兼容(3.x 和 4.x/5.x 返回值不同)
if len(contour_result) == 2:
contours, hierarchy = contour_result
else:
_, contours, hierarchy = contour_result
# 判断是否找到轮廓
if not contours:
raise ValueError("未检测到扇子轮廓,请调整Canny阈值!")
# 选择面积最大的轮廓(扇子主体)
max_contour = max(contours, key=cv2.contourArea)
print(f"找到 {len(contours)} 个轮廓,最大轮廓面积为:{cv2.contourArea(max_contour)}")-
findContours查找轮廓-
从 Canny 边缘图中提取所有闭合形状
-
RETR_EXTERNAL:只提取最外层,不包含内部小孔
-
-
版本兼容
-
OpenCV 3.x 返回 3 个值
-
OpenCV 4.x/5.x 返回 2 个值
-
代码自动适配,不会报错
-
-
筛选最大轮廓
-
扇子是图片中最大的物体
-
用
max(..., key=cv2.contourArea)自动选出扇子轮廓
-
生成掩模(Mask)
python
# -------------------------- 生成掩模 --------------------------
# 创建和图片一样大的全黑图片(掩模)
mask = np.zeros_like(img_rotated)
# 在掩模上把扇子轮廓涂成白色
cv2.drawContours(
mask, # 在哪个图上画
[max_contour], # 画哪个轮廓
-1, # 画所有层级
(255,255,255), # 白色
cv2.FILLED # 填充内部
)
# 显示掩模
cv2.imshow("5-掩模", mask)
cv2.waitKey(0)
cv2.destroyAllWindows()-
掩模是什么?
-
全黑图片 = 不要的区域
-
白色区域 = 要保留的区域
-
-
drawContours填充轮廓-
cv2.FILLED:填充轮廓内部 -
最终得到一张只有扇子是白色、其余全黑的图片,这就是掩模
-
掩模作用:告诉程序 "只保留白色区域"。
提取扇子 + 保存图片
python
# -------------------------- 提取扇子并保存 --------------------------
# 按位与操作:只保留掩模白色区域
result = cv2.bitwise_and(img_rotated, mask)
# 保存图片
cv2.imwrite("shanzi.png", result)
# 显示最终结果
cv2.imshow("6-最终提取的扇子", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
print("✅ 处理完成!扇子已保存为 shanzi.png")bitwise_and 按位与
-
只有原图和掩模同时为非 0的区域才会保留
-
黑色区域(0)会被直接过滤
常见问题
-
检测不到轮廓
- 把 Canny 阈值调低:
30, 100
- 把 Canny 阈值调低:
-
提取不完整
-
模糊核改小:
(3,3) -
阈值调低
-
运行结果