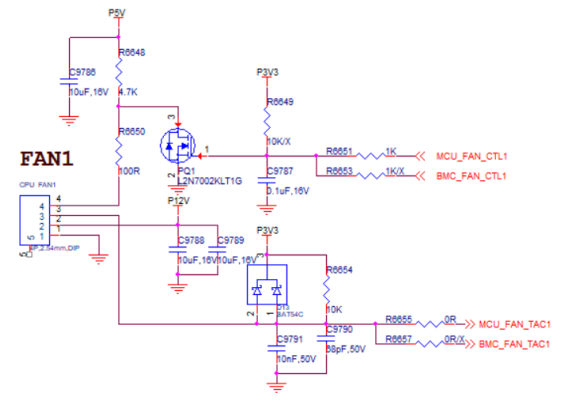
在电脑主板,或者很多板卡上,都会有风扇接口,一般是4P,分别包含GND,VCC,PWM,TACH(转速)。
**VCC:**根据风扇规格提供相应电压,一般是12V,加上储能滤波电容。
**GND:**电流回路。
**PWM:**一般连接MCU或者EC或者BMC的PWM 引脚,通过MOS进行隔离,输出跟转速相关的频率信号。
**TACH:**风扇转速反馈信号,通过BAT54C达到稳压保护作用。
另外,对外接口电源建议串联保险丝,分布式电源负载建议添加磁珠隔离干扰。
参考图:
PWM 调速(4 针风扇,主流)
- 原理 :主板输出25kHz 左右 固定频率、可变占空比的方波,控制风扇内部驱动 IC,实现无级调速。
- 占空比与转速:占空比↑ → 高电平时间↑ → 有效供电时间↑ → 转速↑。
- 优势:调速平滑、低噪、效率高、支持转速反馈(TACH)。
PCB 设计要点
- 电源路径 :+12V、GND 走宽线 (≥20mil),就近放置滤波电容(10μF 电解 + 0.1μF 陶瓷)。
- PWM/TACH 走线 :走短线 、远离干扰源(CPU、内存、时钟),必要时包地。
- MOS 布局:栅极电阻靠近 MOS 栅极,减小寄生电感。
- 散热:MOS 管下方铺铜,提升散热。
- ESD 保护 :PWM/TACH 引脚加TVS 管 (如 SMF05C)或压敏电阻。
保护电路设计(必加)
- 过流保护 :风扇电源串自恢复保险丝(PolySwitch,如 0.5A--1A)。
- 过压 / 反接保护 :+12V 串肖特基二极管 (防反接),并联TVS 管(15V)。
- 过热保护:MOS 管附近加 NTC,超温关断 PWM。
- 堵转保护:TACH 无脉冲超过设定时间,关断 PWM 并报警。
软件控制逻辑(BIOS/EC)
- 温控曲线:定义温度区间与对应 PWM 占空比(如 40℃→30%,70℃→100%)。
- PID 调节:闭环控制,减小温度波动。
- 启停策略:低温下停转(0% 占空比),超阈值启动。
- 故障处理:TACH 异常、过流、过温时触发告警或降频。
常见问题与解决
- 风扇不转 / 抖动:检查 PWM 频率(25kHz±5kHz)、占空比下限(≥10% 防堵转)、驱动电路是否正常。
- 转速不准:校准 TACH 上拉电阻、计数频率,排除干扰。
- 噪音大:优化 PWM 频率(避开人耳敏感区)、降低低占空比抖动。
- 发热:选用低 Rds (on) MOS、优化 PCB 散热。
什么是PID调节?
PID = 比例 + 积分 + 微分 它是一种自动闭环控制算法 ,用来:让系统快速、平稳、不超调、不震荡地到达目标值。
在主板风扇调速里:
- 目标值:你想要的温度(比如 50℃)
- 输出值:风扇 PWM 占空比
- PID :自动算 PWM,让温度稳稳停在目标
1. P(Proportional)比例
- 误差越大,输出越强
- 温度差得越多 → 风扇转得越快
- 缺点:永远到不了目标,会剩一点静差
2. I(Integral)积分
- 把过去的误差累加,慢慢补输出
- 用来消除静差,让温度真正达到目标
- 太强会超调、震荡
3. D(Derivative)微分
- 看误差变化快慢,提前刹车
- 温度突然飙升 → 提前加大风扇
- 温度开始下降 → 提前减小风扇
- 作用:防超调、让曲线更平滑
用风扇调速一句话总结
P:现在差多少,我就转多快 I:过去差了多久,我慢慢补上 D:温度变化快不快,我提前反应
三者一起 = 风扇转速平滑、温度稳定、不忽快忽慢。