原理
随机采样一致性RANSAC (Random Sample Consensus) 是一种鲁棒的模型拟合算法。该算法通过随机采样和迭代优化,从包含噪声和离群点的数据中估计数学模型参数,常用于点云分割和平面拟合。
算法核心思想:
RANSAC通过迭代地从数据中随机选择最小样本集(如拟合平面需要3个点)来估计模型参数,然后根据距离阈值判断哪些点是内点(符合模型),最终选择具有最多内点的模型作为最优解。
算法详细流程
- 随机采样 :从点云中随机选择拟合模型所需的最小样本数 mmm(平面:3个点)
- 模型估计 :用这 mmm 个点计算模型参数 θ\thetaθ
- 内点判断 :对于点云中所有点,计算到模型的距离 did_idi,如果 di<ϵd_i < \epsilondi<ϵ,则判定为内点
- 内点计数 :统计符合模型的内点数量 ninliern_{\text{inlier}}ninlier
- 模型评估 :如果当前模型的内点数 ninliern_{\text{inlier}}ninlier 大于历史最佳,则更新最佳模型
- 迭代终止 :重复步骤1-5,直到达到最大迭代次数 NNN 或满足收敛条件
- 模型优化:用所有内点重新估计模型参数,得到最终模型
数学表达式
- 点 pip_ipi 到模型 M(θ)M(\theta)M(θ) 的距离:di=distance(pi,M(θ))d_i = \text{distance}(p_i, M(\theta))di=distance(pi,M(θ))
- 内点判断条件:di<ϵd_i < \epsilondi<ϵ
- 内点集合:I={pi∣di<ϵ}I = \{p_i | d_i < \epsilon\}I={pi∣di<ϵ}
- 目标函数:maxθ∣I(θ)∣\max_{\theta} |I(\theta)|maxθ∣I(θ)∣(最大化内点数量)
迭代次数计算
RANSAC所需的理论迭代次数 NNN 可以通过以下公式估计:
N=log(1−p)log(1−wm)N = \frac{\log(1 - p)}{\log(1 - w^m)}N=log(1−wm)log(1−p)
其中:
- ppp:期望得到正确模型的概率(通常设为0.99)
- www:数据中内点的比例(需要估计)
- mmm:拟合模型所需的最小样本数
参数作用分析
-
距离阈值 (DistanceThreshold):
- 判断点是否为内点的最大距离
- 过小:可能遗漏真正内点,导致模型拟合不准确
- 过大:可能包含太多外点,降低模型精度
- 推荐值:根据点云精度和噪声水平设置,通常为0.01-0.1米
-
最大迭代次数 (MaxIterations):
- 算法最大运行迭代次数
- 过小:可能未找到最优模型
- 过大:计算时间增加,可能无必要
- 推荐值:1000-10000(根据数据复杂度调整)
-
概率阈值 (Probability):
- 期望找到正确模型的概率
- 通常设为0.99(99%置信度)
- 值越高,需要的迭代次数越多
-
模型类型 (ModelType):
- 要拟合的几何模型类型
- 常用类型:平面(SACMODEL_PLANE)、圆柱体(SACMODEL_CYLINDER)、球体(SACMODEL_SPHERE)、直线(SACMODEL_LINE)
算法特点
- 强鲁棒性:对离群点具有很好的容忍性
- 模型多样性:可以拟合多种几何模型
- 自适应迭代:根据内点比例自动调整迭代次数
- 计算复杂度 :迭代次数与内点比例相关,复杂度为 O(N⋅k)O(N \cdot k)O(N⋅k),其中 kkk 为每次迭代的计算量
算法优势
- 离群点鲁棒性:即使数据中包含大量离群点,也能准确拟合模型
- 模型通用性:适用于多种几何模型拟合
- 理论保证:有数学理论支持,可以计算所需迭代次数
- 参数直观:参数有明确的物理意义
算法局限性
- 计算效率:对于低内点比例的数据,需要大量迭代
- 模型假设:需要预先知道要拟合的模型类型
- 参数敏感性:距离阈值的选择对结果影响较大
- 局部最优:可能陷入局部最优解,特别是当数据中存在多个模型时
实现算法
基本用法:
cpp
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients(true); // 优化模型系数
seg.setModelType(pcl::SACMODEL_PLANE); // 设置平面模型
seg.setMethodType(pcl::SAC_RANSAC); // 使用RANSAC方法
seg.setMaxIterations(1000); // 设置最大迭代次数
seg.setDistanceThreshold(0.01); // 设置内点距离阈值
seg.setInputCloud(cloud);
seg.segment(*inliers, *coefficients); // 执行分割得到内点和模型系数
// 提取内点作为滤波结果
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud);
extract.setIndices(inliers);
extract.setNegative(false); // false:提取内点,true:提取外点
extract.filter(*cloud_filtered);多种模型类型支持:
cpp
// 平面模型(最小样本数:3)
seg.setModelType(pcl::SACMODEL_PLANE);
// 圆柱体模型(最小样本数:7,需要法线)
seg.setModelType(pcl::SACMODEL_CYLINDER);
// 球体模型(最小样本数:4)
seg.setModelType(pcl::SACMODEL_SPHERE);
// 直线模型(最小样本数:2)
seg.setModelType(pcl::SACMODEL_LINE);
// 圆环模型(最小样本数:5)
seg.setModelType(pcl::SACMODEL_CIRCLE2D);
// 圆锥模型(最小样本数:6)
seg.setModelType(pcl::SACMODEL_CONE);高级参数设置:
cpp
// 设置概率阈值(默认为0.99)
seg.setProbability(0.99);
// 设置半径限制(对于圆柱体、球体等模型)
seg.setRadiusLimits(0.1, 0.5); // 最小半径0.1m,最大半径0.5m
// 设置轴限制(对于圆柱体模型)
Eigen::Vector3f axis(0, 0, 1); // Z轴方向
seg.setAxis(axis);
seg.setEpsAngle(pcl::deg2rad(15.0)); // 角度容差15度完整代码
cpp
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/visualization/pcl_visualizer.h>
int main() {
// 1. 加载点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("02.pcd", *cloud) == -1) {
std::cerr << "错误:无法加载02.pcd文件" << std::endl;
return -1;
}
std::cout << "加载点云成功,点数: " << cloud->points.size() << std::endl;
// 2. 创建分割对象
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients(true); // 优化模型系数
seg.setModelType(pcl::SACMODEL_PLANE); // 平面模型
seg.setMethodType(pcl::SAC_RANSAC); // RANSAC方法
seg.setMaxIterations(1000); // 最大迭代次数
seg.setDistanceThreshold(0.01); // 内点距离阈值
// 3. 执行RANSAC分割
seg.setInputCloud(cloud);
seg.segment(*inliers, *coefficients);
if (inliers->indices.size() == 0) {
std::cerr << "错误:未找到平面模型" << std::endl;
return -1;
}
std::cout << "RANSAC平面拟合结果:" << std::endl;
std::cout << " 内点数量: " << inliers->indices.size() << std::endl;
std::cout << " 外点数量: " << cloud->size() - inliers->indices.size() << std::endl;
std::cout << " 平面方程: "
<< coefficients->values[0] << "x + "
<< coefficients->values[1] << "y + "
<< coefficients->values[2] << "z + "
<< coefficients->values[3] << " = 0" << std::endl;
// 4. 提取内点作为拟合结果
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud);
extract.setIndices(inliers);
extract.setNegative(false); // 提取内点(平面上的点)
extract.filter(*filtered);
std::cout << "RANSAC滤波后点数: " << filtered->points.size() << std::endl;
std::cout << "参数: 模型=平面, 距离阈值=0.01m, 最大迭代=1000" << std::endl;
// 5. 可视化
pcl::visualization::PCLVisualizer viewer("filter");
// 原始点云(红色,半透明)
viewer.addPointCloud<pcl::PointXYZ>(cloud, "original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 0.0, 0.0, "original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.3, "original");
// 滤波后点云(白色)- 内点
viewer.addPointCloud<pcl::PointXYZ>(filtered, "filtered");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 1.0, 1.0, "filtered");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "filtered");
while (!viewer.wasStopped()) {
viewer.spinOnce(100);
}
return 0;
}运行结果
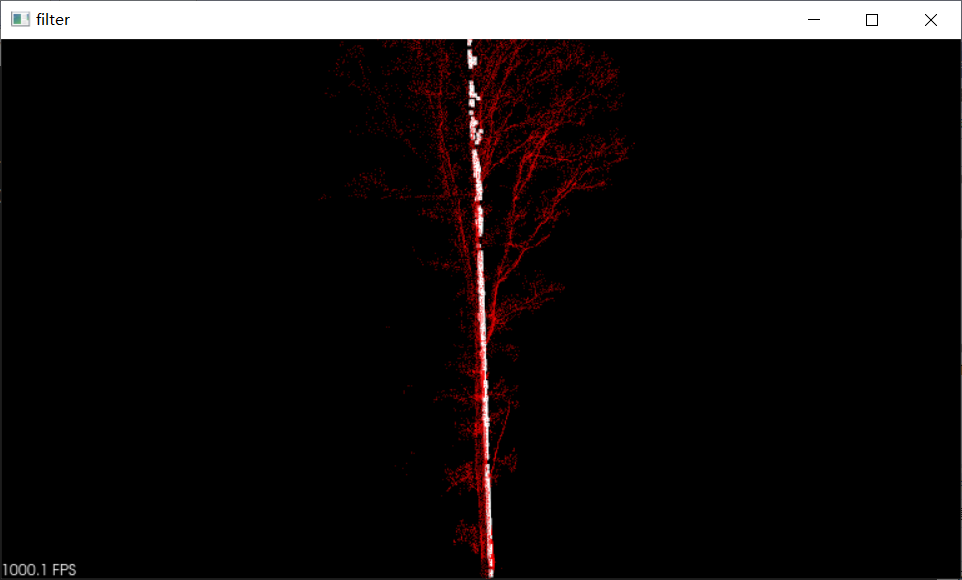
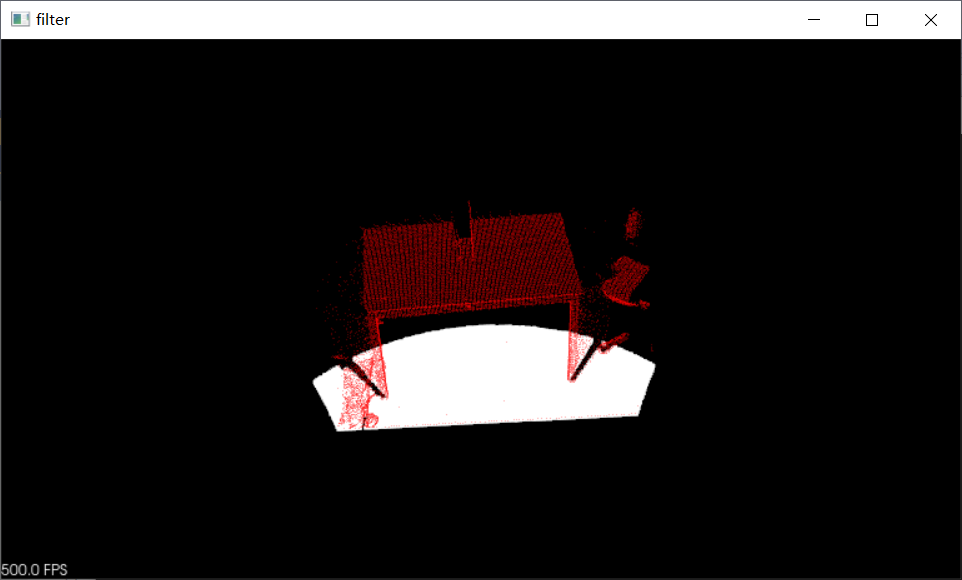
用两种不同的数据进行平面拟合,当数据中包含平面时,能够完全拟合,选取的其中最大的一个平面进行拟合。