****论文题目:****Deep Learning-Based Multifeature Fusion Model for Accurate Open-Circuit Fault Diagnosis in Electric Vehicle DC Charging Piles(基于深度学习的电动汽车直流充电桩开路故障精确诊断多特征融合模型)
****期刊:****IEEE TRANSACTIONS ON TRANSPORTATION ELECTRIFICATION
****摘要:****随着电动汽车的普及,对充电基础设施的需求激增。因此,充电桩的维护已成为一个需要重视的关键问题。为了有效地利用充电桩故障时前后电路的故障特征,本文提出了一种多特征融合模型。首先,利用前、后台特征信息融合模块将采集到的前台故障特征量信号与后台故障特征量信号进行融合。然后,利用时空特征提取模块并行挖掘时空高维特征;最后,通过时空特征融合分类模块,对时空特征进行融合分类,达到故障诊断的目的。该方法采用深度学习技术,避免了传统深度学习算法中图形输入的繁琐步骤和手动选择特征带来的误差,充分发挥了深度学习的并行诊断性能。仿真结果表明,该方法在诊断精度、收敛速度、抑制过拟合等方面均优于其他比较算法,并具有良好的抗噪声能力,能够应对充电桩的噪声情况。在实验测试中,该方法的故障诊断准确率达到96.36%,对大多数故障类别的识别灵敏度高于对比模型,进一步验证了该方法的优越性和鲁棒性。
论文解读|基于深度学习多特征融合模型的电动汽车直流充电桩开路故障诊断
一、研究背景与问题动机
随着电动汽车的快速普及,充电基础设施的需求急剧增长,充电桩的安全运维问题也日益凸显。直流充电桩因其高充电功率和快充速度已成为主流充电形式,其核心部件------充电模块------占充电桩总成本的 40%--50%。
然而,充电模块长期暴露于恶劣的户外环境,再加上管理不当,极易发生器件故障。统计数据表明:
- 半导体器件和电容器故障占整个电力电子变换器系统总故障的 51%;
- IGBT(绝缘栅双极型晶体管)是电力电子变换器中最易失效的器件,占总故障的 34%。
在各类故障中,短路故障 有相对成熟的保护方案;而开路故障由于产生的故障电流极小,难以被现有保护装置及时检测,会进一步恶化其他器件的工作状态,并产生大量谐波干扰,危害更为隐蔽。因此,如何准确诊断充电桩的开路故障,成为提升充电安全性和可靠性的关键课题。
二、现有方法的局限性
2.1 基于解析模型的方法
该类方法依赖精确的系统建模和实时数据采集。但直流充电桩电路结构复杂、不确定性高,建立准确的物理模型极为困难。
2.2 传统数据驱动的两步法
传统方法分为特征提取(时域/频域/时频域分析,如Park变换、FFT、DWT、EMD等)和特征分类(SVM、ANN、决策树等)两步。其主要缺陷是:
- 需要人工手动选择故障特征,带来主观性误差;
- 无法对多路信号进行并行分析。
2.3 现有深度学习方法的不足
深度学习方法有两种主流方向:
- 将1D信号转换为2D图像再输入CNN:图像生成、存储和读取过程繁琐,影响实时性,且存在特征损失和数据冗余;
- 直接提取1D信号特征:无法充分利用深度学习的并行处理能力。
2.4 最关键的诊断难点:前后级信号的模糊性
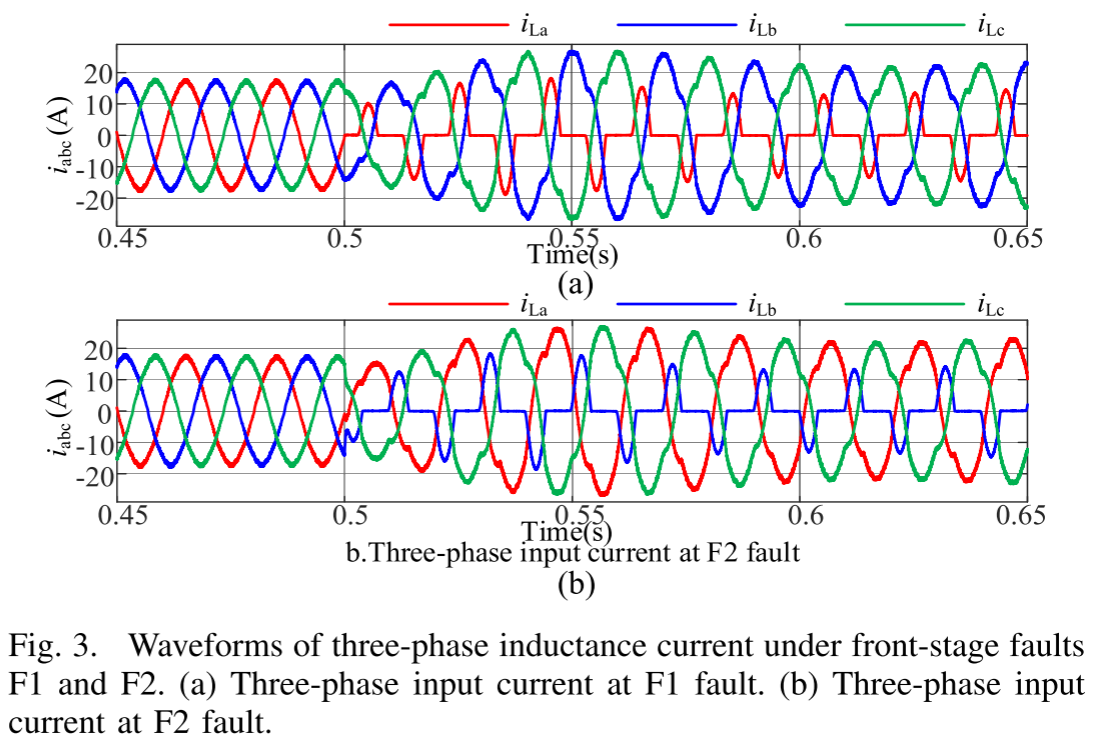
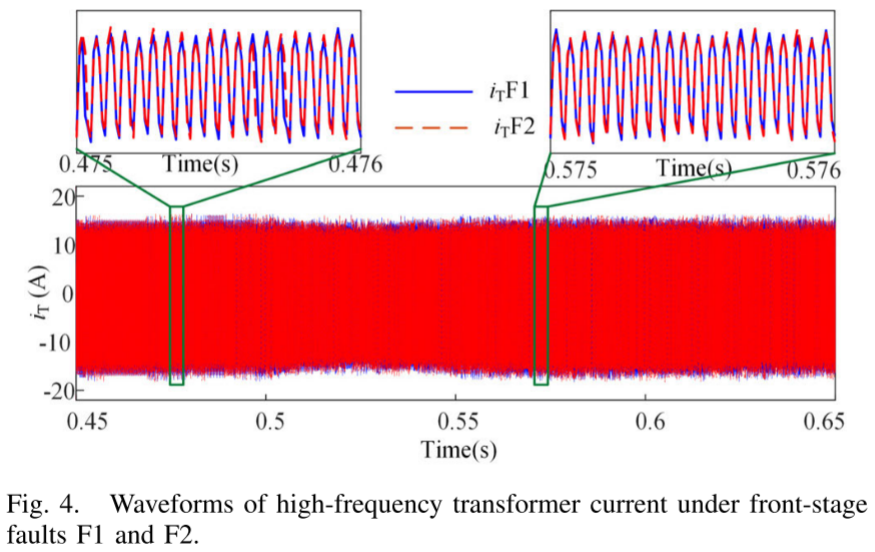
【图3、图4】 --- 前级故障F1和F2的三相电感电流波形,以及对应的高频变压器电流波形
本文深入分析揭示了一个核心难题:由于电路结构的特殊性,不同位置的故障在跨级传播时会呈现相似的特征。
- 前级故障(F1/F2)传至后级时:两种故障在后级高频变压器电流波形上几乎一致,无法通过后级信号单独区分(图4)。
- 后级故障(F9/F10)传至前级时:两种故障在前级三相电感电流波形上也几乎相同,无法通过前级信号单独区分(图5)。
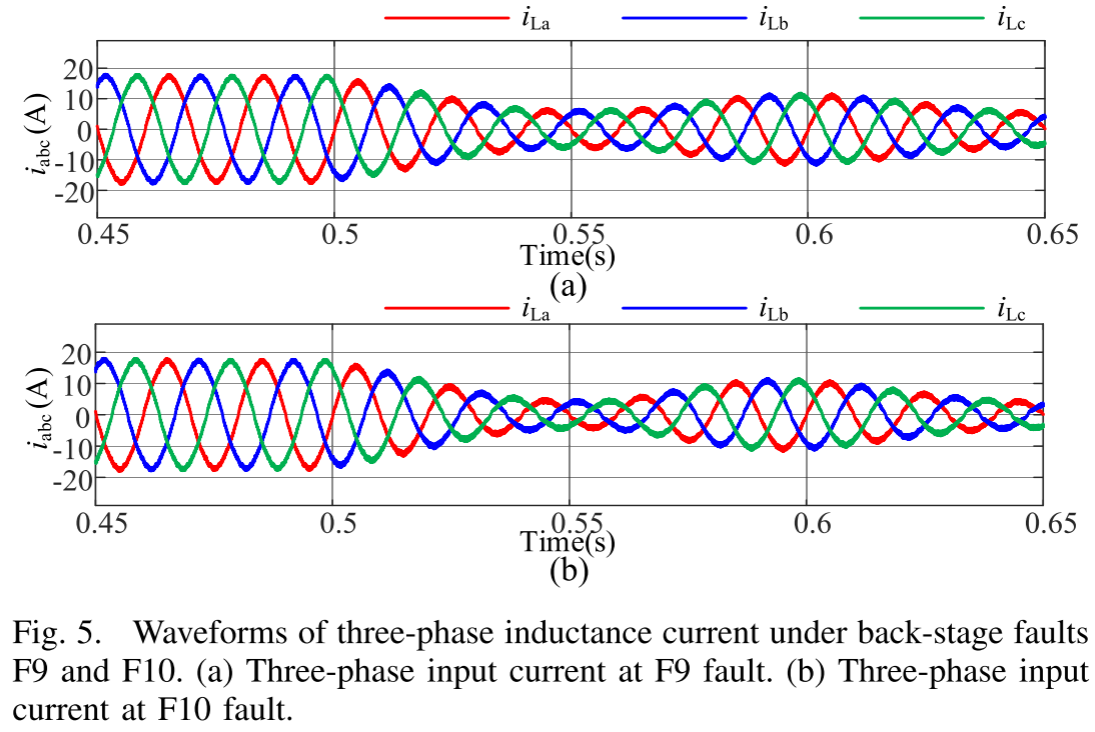
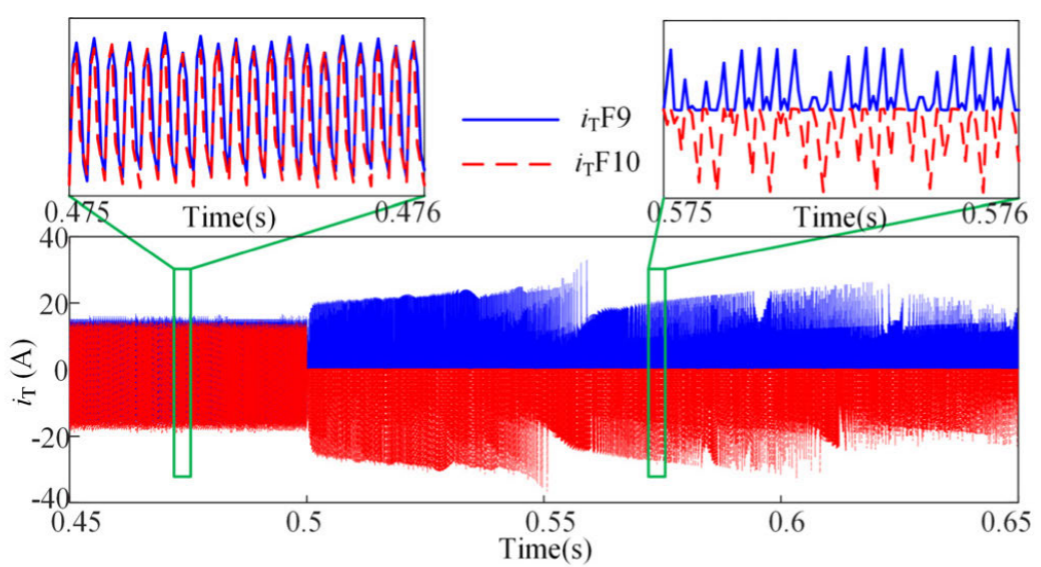
📌 【图5、图6】 --- 后级故障F9和F10的三相电感电流波形,及对应的高频变压器电流波形
这一发现是本文提出多特征融合策略的核心出发点------必须同时利用前级和后级的特征信息,才能实现准确的故障定位。
三、充电桩电路拓扑与故障类型
3.1 电路拓扑
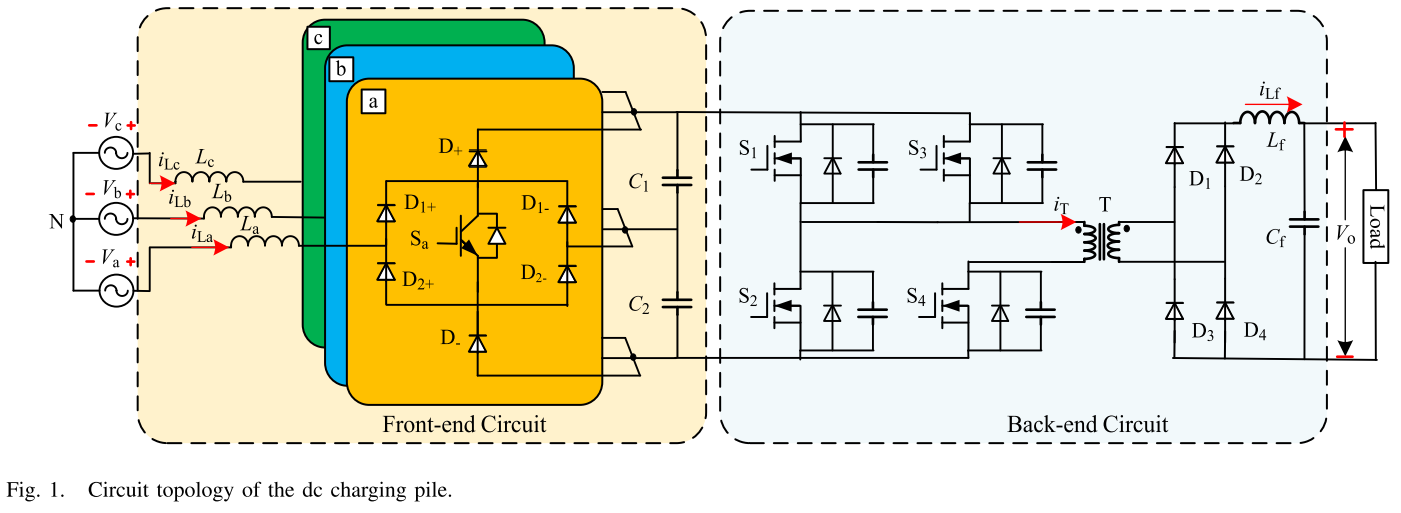
【图1】 --- 直流充电桩电路拓扑结构
本文研究的直流充电桩采用典型的两级结构:
- 前级:三相三线三电平 VIENNA 整流器,实现整流和功率因数校正,由三相输入电感(La, Lb, Lc)、三相功率模块和直流侧并联电容(C1, C2)组成;
- 后级:隔离型高频 DC/DC 变换器,实现功率变换和电气隔离,包含逆变桥(Q1--Q4)、整流桥(D1--D4)、高频变压器(T)及滤波器(Lf, Cf)。
两级均采用PI控制策略。主要电路参数如下表所示。
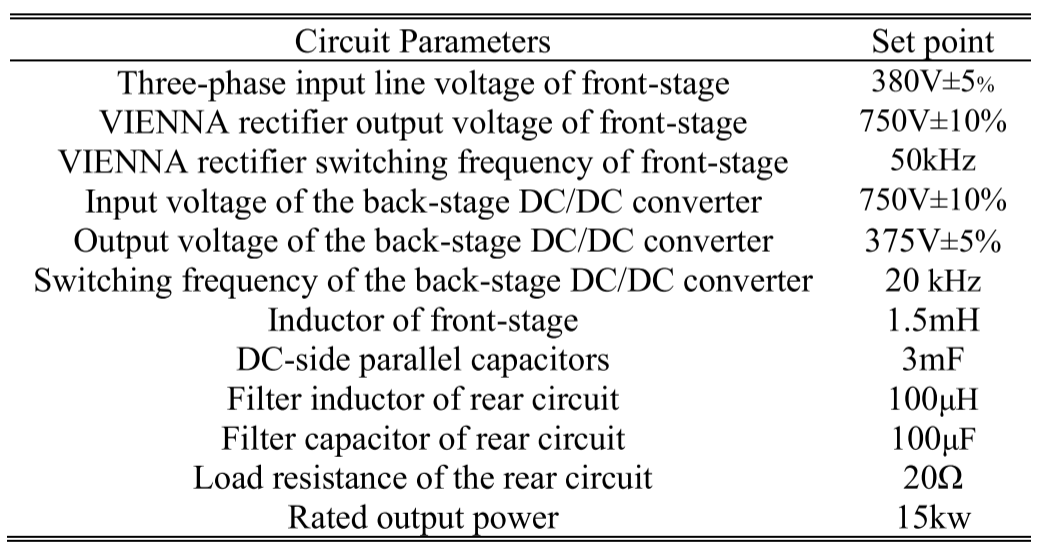
【表I】 --- 电路参数表(额定输出功率15kW,前级开关频率50kHz,后级开关频率20kHz等)
3.2 故障分类
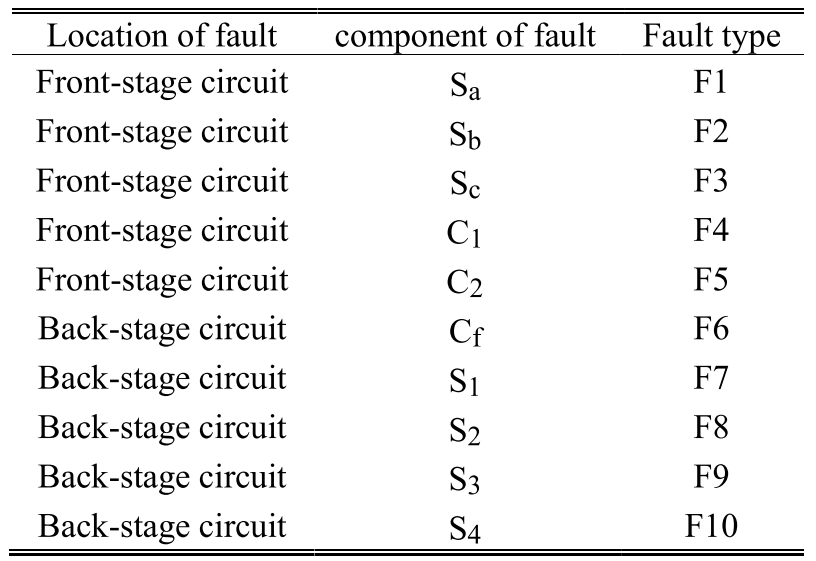
【表II】 --- 开路故障分类(共10种故障类型 + 正常态F0,共11类)
开路故障分为10类:
- 前级电路:Sa(F1)、Sb(F2)、Sc(F3)、C1(F4)、C2(F5);
- 后级电路:Cf(F6)、S1(F7)、S2(F8)、S3(F9)、S4(F10)。
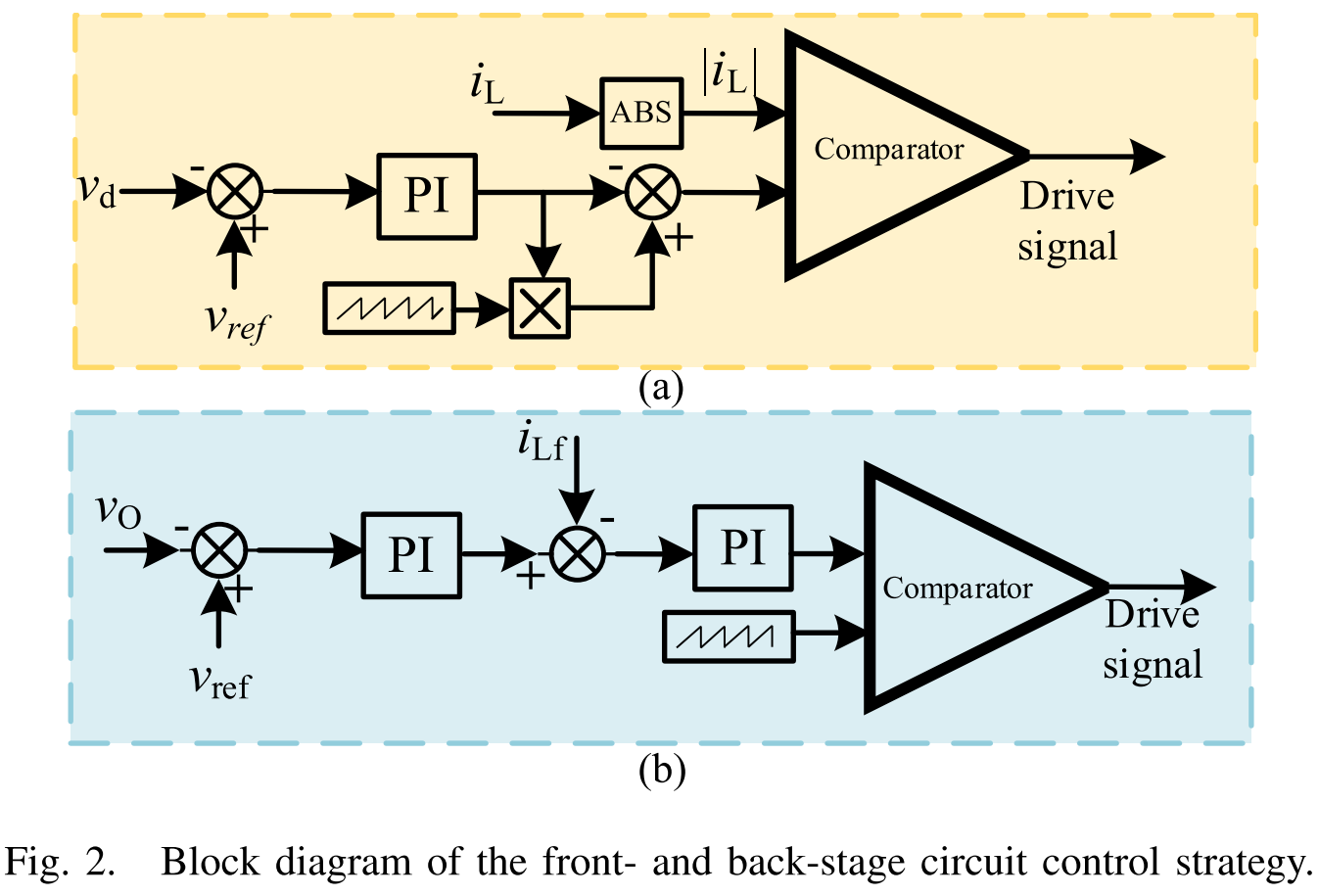
【图2】 --- 前后级控制策略框图
基于上述分析,本文最终选择**前级三相输入电流(iLa, iLb, iLc)和后级高频变压器电流(iT)**作为故障特征量。
四、多特征融合诊断模型(核心方法)
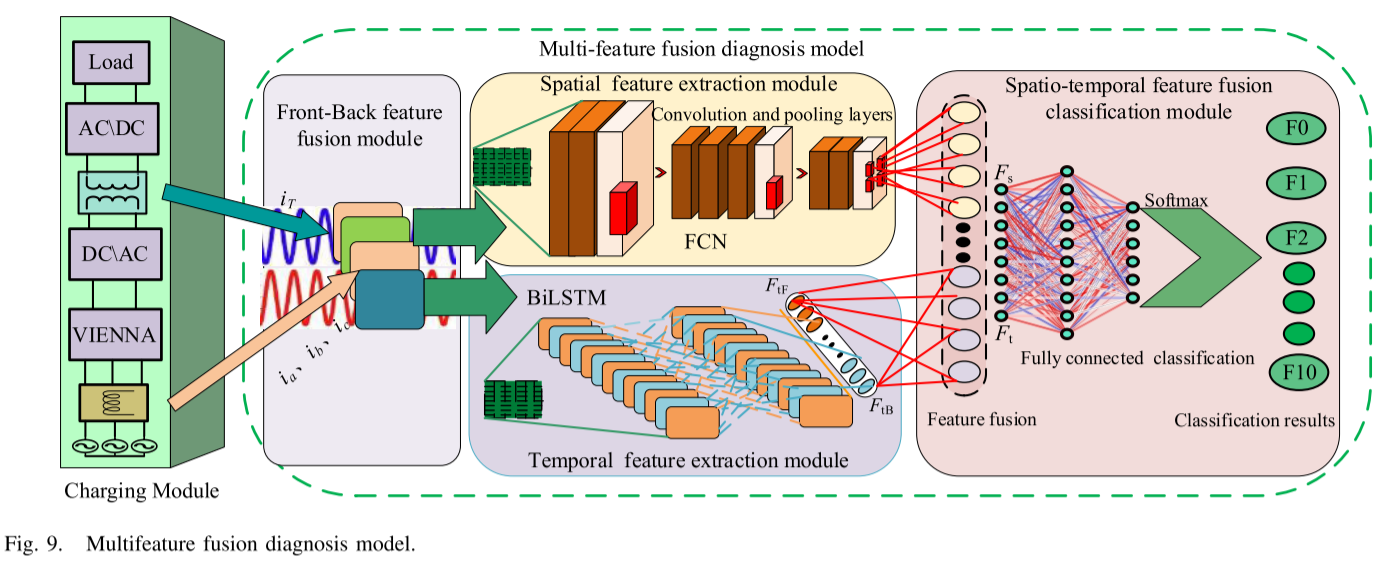
【图9】 --- 多特征融合诊断模型总体框架图
整个诊断模型由四个模块串联组成,如下图所示。
4.1 前后级特征信息融合模块
充电桩充电模块作为一个动态整体运行。若只从单一位置采集数据,则无法捕捉充电模块的全局变化特征。
本模块将采集到的**前级故障特征量(iLa, iLb, iLc)与 后级故障特征量(iT)**合并为一个 2D 张量 FFB,实现前后级故障特征信息的融合,再将 FFB 传入后续特征提取模块。
💡 这一简单而有效的融合操作是模型取得高精度的关键。对比实验证明(见第五节),融合前后级信息后,准确率从 81.45%(仅前级)或 71.18%(仅后级)飞跃至 99.55%。
4.2 空间特征提取模块(FCN)
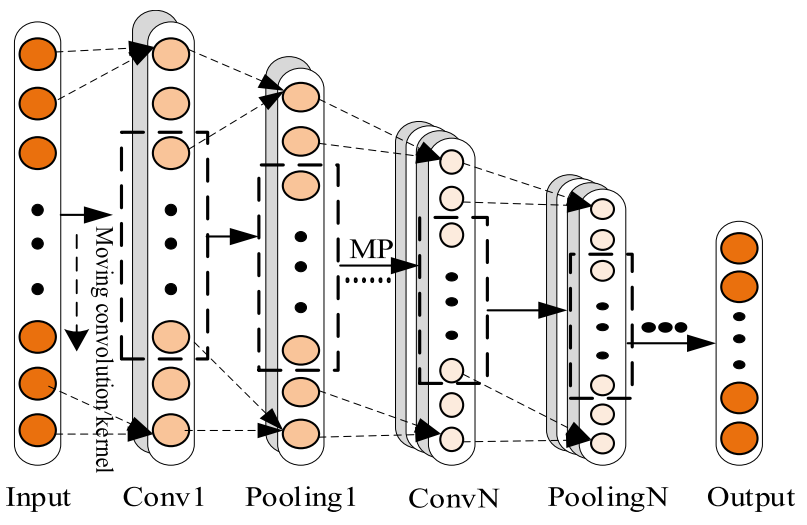
【图7】 --- FCN网络结构图
本模块使用**全卷积网络(FCN)**提取空间特征,FCN是在1D CNN基础上改进而来的,用卷积层替换了全连接层,具有以下优势:
- 适应任意尺寸输入;
- 通过稀疏交互和权值共享减少参数量;
- 降低对训练样本数量的要求。
具体结构为3层卷积+池化操作(见表IV),前两层池化使用最大池化(MP)以应对充电桩故障信号易受噪声干扰的特点,最后一层使用全局最大池化(GMP),能在高维空间更好地捕捉信号的数值大小关系(即空间特征),同时降低特征向量维度和网络参数量。
4.3 时序特征提取模块(BiLSTM)
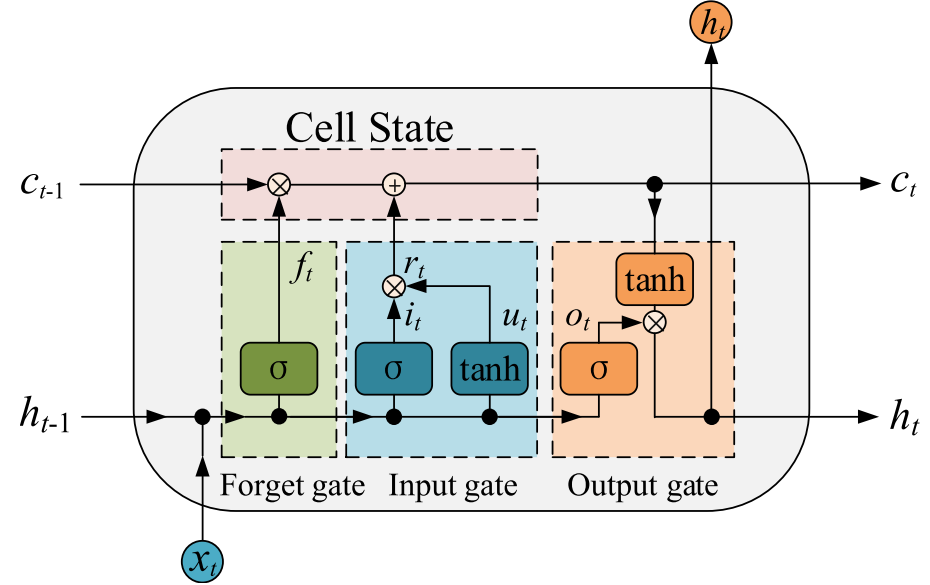
【图8】 --- LSTM网络结构图(含遗忘门、输入门、输出门)
由于充电模块受PI控制积分环节的影响,故障电流信号(iLa, iLb, iLc, iT)具有明显的时序依赖性,因此使用 BiLSTM(双向长短期记忆网络) 提取时序特征。
相较于标准 RNN,LSTM 通过遗忘门、输入门、输出门 三个门控单元解决了长序列中的梯度消失问题。本文进一步采用 BiLSTM(即前向+后向 LSTM 的组合),从正反两个方向提取时序特征(FtF 和 FtB),合并为最终时序特征 Ft,相较于单向 LSTM:
- 迭代次数减少约 11 代(更快收敛);
- TrainAcc 和 ValAcc 均提升超过 8%。
4.4 时空特征融合分类模块
将空间特征 Fs 与时序特征 Ft 拼接(Concatenate)得到融合特征张量 Fst,随后输入全连接(FC)层,使用 Softmax 函数输出各故障类别的概率:
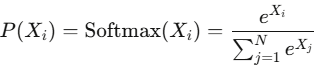
取概率最大的类别 i 作为最终故障诊断结果,实现11类(F0--F10)的精确分类。
五、实验设置与超参数优化
5.1 数据集构建
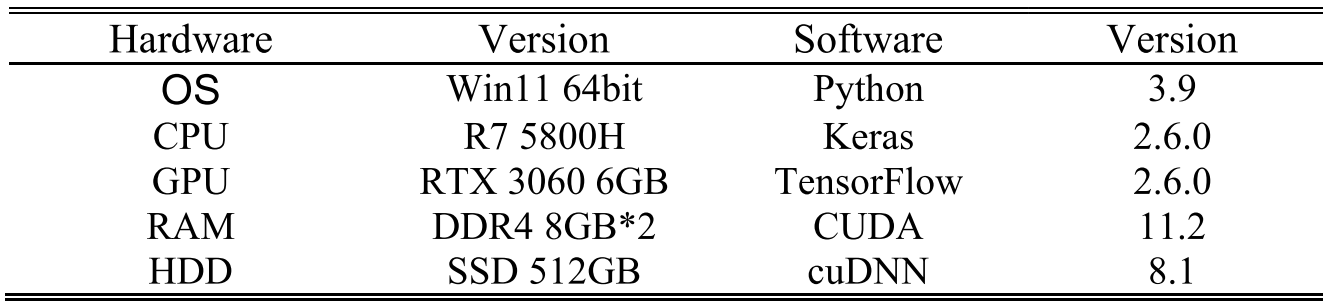
【表III】 --- 硬件平台与软件版本(RTX 3060 6GB GPU,TensorFlow 2.6.0,Python 3.9)
使用 MATLAB/Simulink 建立充电模块仿真模型,为增强模型泛化能力:
- 电感参数浮动 ±10%;
- 电容参数浮动 ±20%;
- 负载在额定值的 10%--200% 范围内随机变化。
采样频率设为 8 kHz(综合考虑采样电路限制和信号覆盖充分性),每次故障采集 0.2s 数据,每个样本包含 4 路信号(iLa, iLb, iLc, iT)共 4×1600 个数据点。
共 11 类(F0--F10),每类仿真 500 次,生成总计 5500 个无噪声数据集,按 8:1:1 划分训练集、验证集和测试集。
5.2 超参数优化
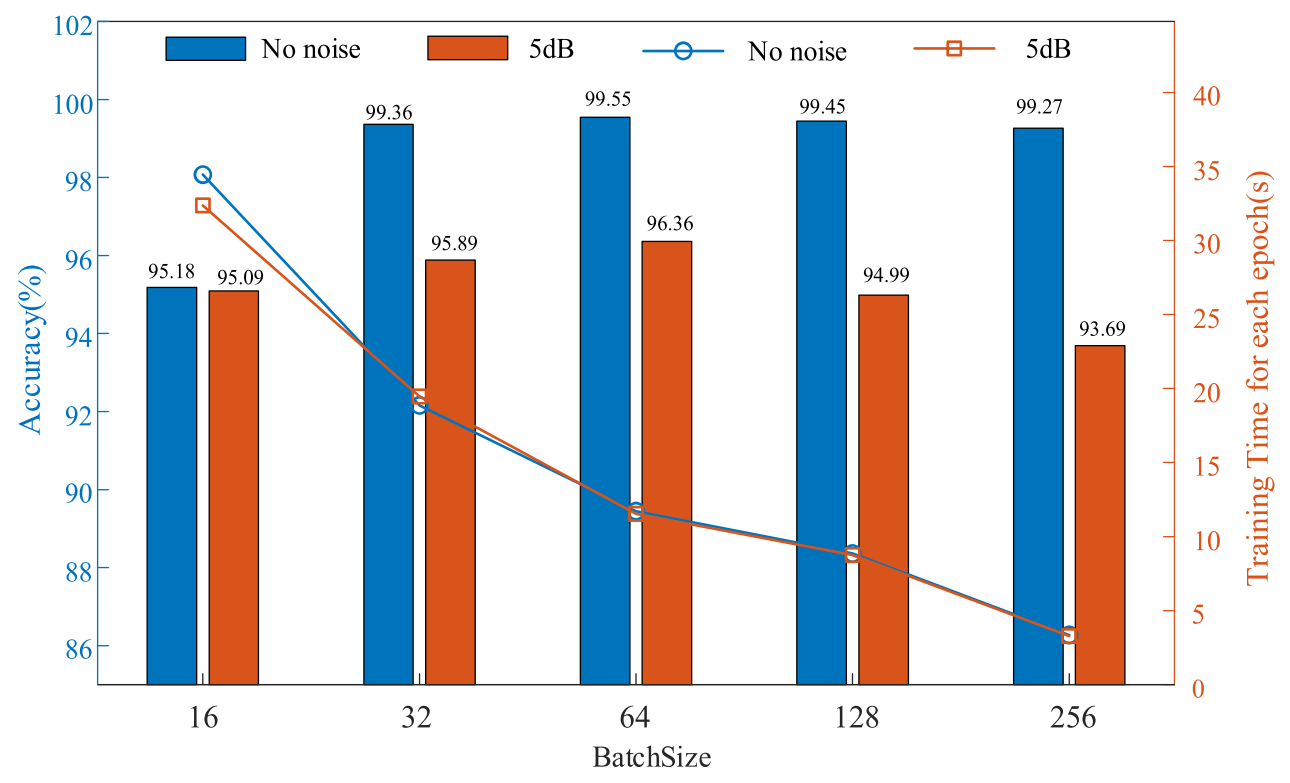
图11】 --- 不同BatchSize在无噪声和5dB噪声环境下的训练结果对比
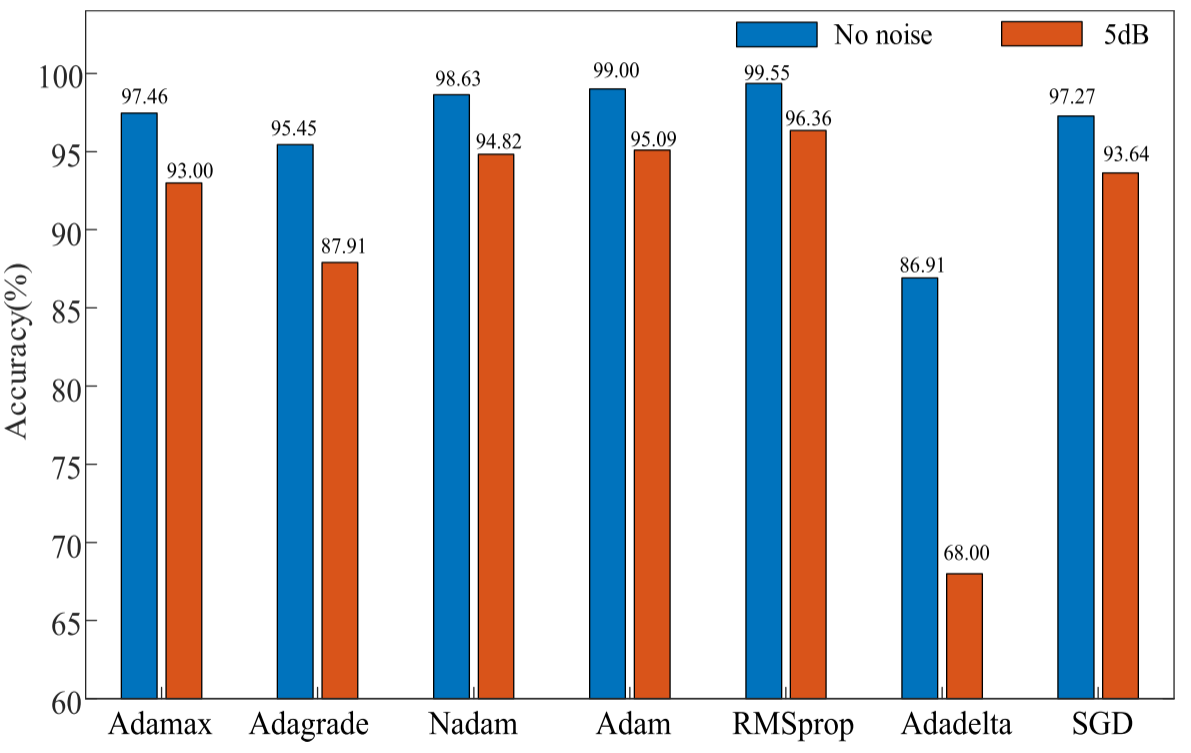
【图12】 --- 不同优化器的训练结果对比
本文对 BatchSize 和优化器进行了系统对比:
- BatchSize :无噪声环境下 32/64/128/256 差异不大;但在 SNR=5dB 的噪声环境下,BatchSize=64 取得最高精度且训练时间合理,因此最终选择 64。
- 优化器 :对比了 Adamax、Adagrade、Nadam、Adam、RMSprop、Adadelta、SGD 共 7 种,结果表明 RMSprop 获得最高诊断精度 96.36%,最终采用。
此外,引入了两项训练优化策略:
- ReduceLROnPlateau:验证集精度连续 3 轮无提升时,以 0.1 的倍率衰减学习率;
- EarlyStopping:验证集精度连续 5 轮无提升时提前终止训练,防止过拟合。
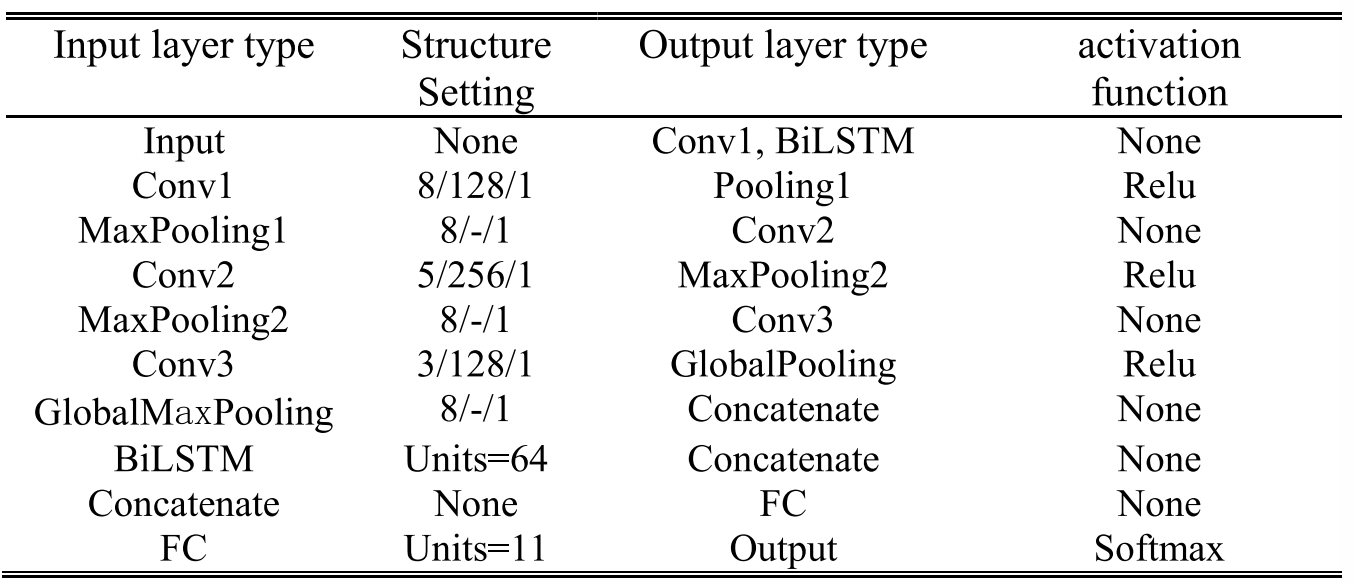
【表IV】 --- 网络模型相关参数(各层结构、卷积核大小、激活函数等)
六、仿真实验结果与分析
6.1 前后级融合的必要性验证
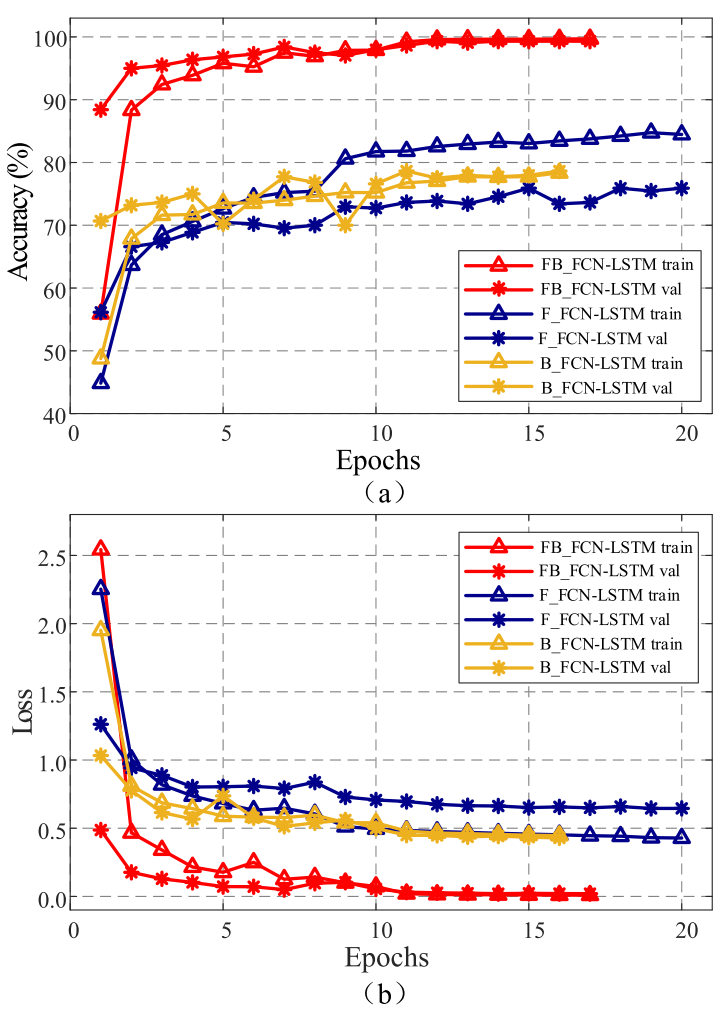
【图13】 --- 三种模型(仅前级/仅后级/前后级融合)的训练精度和损失值变化曲线
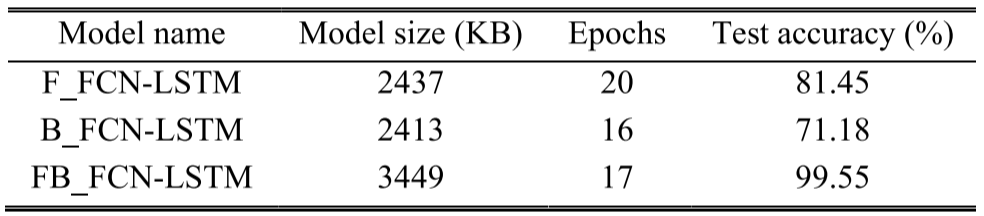
【表V】 --- 三种模型资源性能分析(模型大小、训练轮数、测试集准确率)
构建三种对比模型在无噪声环境下测试:
| 模型 | 数据来源 | 模型大小 | 迭代次数 | 测试准确率 |
|---|---|---|---|---|
| F_FCN-LSTM | 仅前级三相电流 | 2437 KB | 20 | 81.45% |
| B_FCN-LSTM | 仅后级变压器电流 | 2413 KB | 16 | 71.18% |
| FB_FCN-LSTM | 前后级融合 | 3449 KB | 17 | 99.55% |
结论:单独使用前级或后级信号时,模型无法区分跨级传播后特征相似的故障,融合前后级信息后,诊断准确率从最高的 81.45% 大幅提升至 99.55%,同时也有效抑制了过拟合。
6.2 时空特征融合方法的优越性
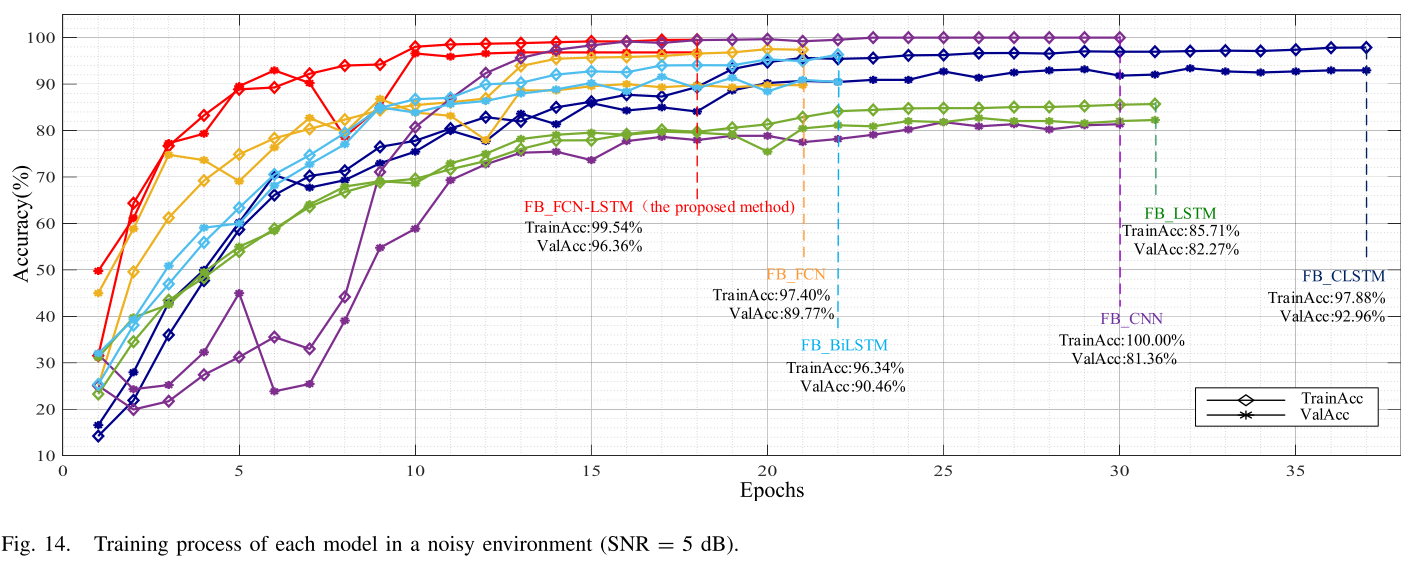
【图14】 --- SNR=5dB噪声环境下各对比模型的训练过程(TrainAcc和ValAcc曲线)
在 SNR=5dB 的高噪声数据集上,对6种特征提取方法进行对比:
- FCN vs CNN:FCN 准确率更高,TrainAcc 与 ValAcc 的偏差更小,说明改进的全卷积结构有助于提升精度并缓解过拟合;
- BiLSTM vs LSTM :BiLSTM 迭代次数少约 11 代,TrainAcc 和 ValAcc 均提升超过 8%,验证了双向结构的优势;
- CLSTM(串联CNN+LSTM)vs FCN-LSTM(并联) :二者均能同时捕捉时序和空间特征,但 CLSTM 需要 CNN 先处理再输入 LSTM,迭代次数更多、收敛更慢;FCN-LSTM 采用并联结构,收敛速度更快。
本文方法 FB_FCN-LSTM 在诊断精度、收敛速度、抑制过拟合三个维度上均优于所有对比方法。
6.3 噪声鲁棒性分析
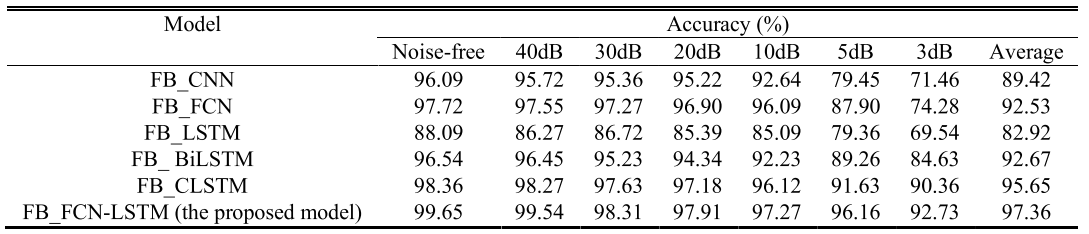
【表VI】 --- 各模型在不同噪声级别(无噪声、40dB、30dB、20dB、10dB、5dB、3dB)下的准确率对比
通过在训练数据集中引入不同强度的高斯白噪声,对各模型的抗噪性进行评估:
| 模型 | 无噪声 | 5dB | 3dB | 平均 |
|---|---|---|---|---|
| FB_CNN | 96.09% | 71.46% | 89.42% | 89.42% |
| FB_FCN | 97.72% | 87.90% | 74.28% | 92.53% |
| FB_LSTM | 88.09% | 79.36% | 69.54% | 82.92% |
| FB_BiLSTM | 96.54% | 89.26% | 84.63% | 92.67% |
| FB_CLSTM | 98.36% | 91.63% | 90.36% | 95.65% |
| FB_FCN-LSTM | 99.65% | 96.16% | 92.73% | 97.36% |
即便在 SNR=3dB 的极强噪声下,本文方法仍保持 92.73% 的准确率,表现出优异的噪声鲁棒性。实验结论表明:时空特征融合能有效增强模型的抗噪能力。
七、实验平台验证
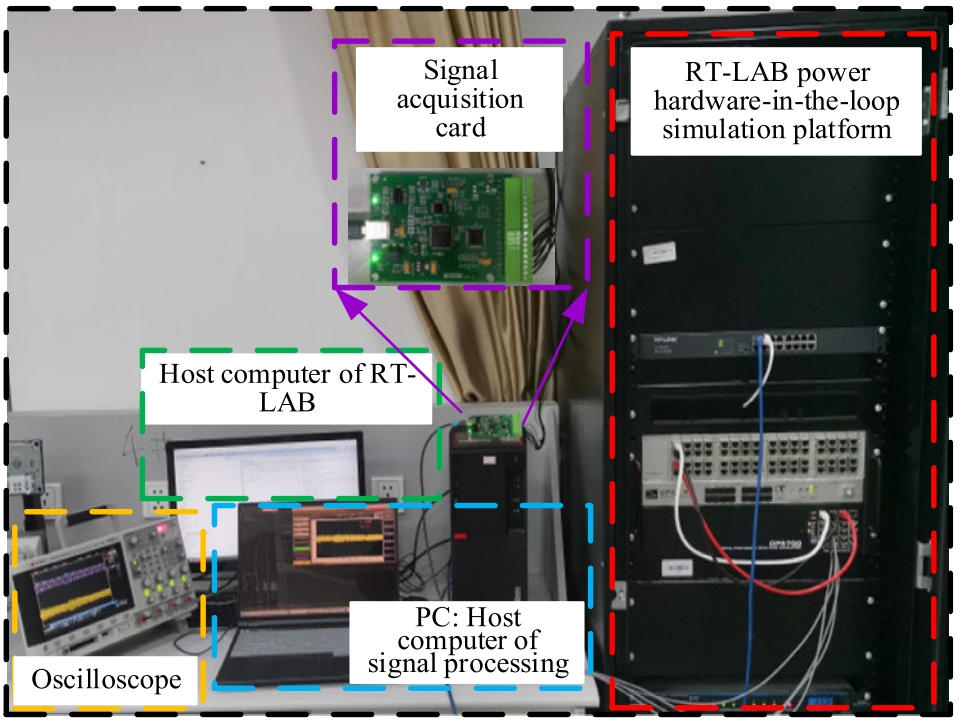
【图15】 --- 故障诊断实验平台(含RT-LAB、示波器、信号采集卡等)
为进一步验证方法的有效性,搭建了半物理仿真实验平台,主要由以下部分组成:
- RT-LAB 实时仿真器:编译运行充电桩 Simulink 模型,通过内置IO板和FPGA与外部硬件交互;
- USB DAQ-7606I 信号采集卡(AUMANYU公司):采集 iLa, iLb, iLc, iT 信号;
- 示波器:可视化观察故障波形;
- 主机:运行 Python-Keras 框架调用训练好的模型进行故障诊断。
每种故障类型各进行 10 次实验,示波器波形如下图所示(上半部分为 iLa, iLb, iLc,下半部分为 iT)。
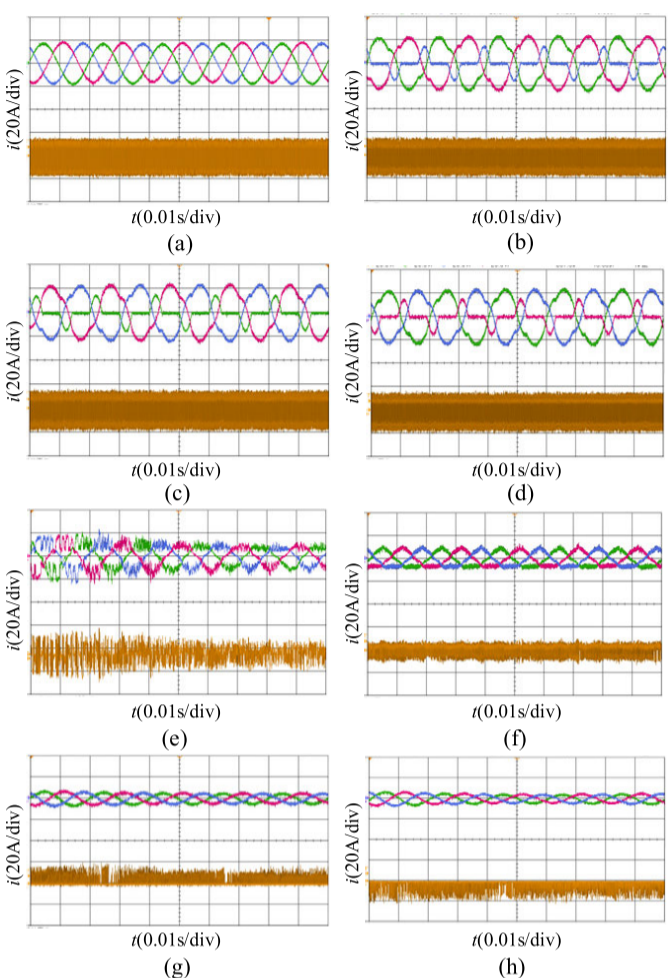
【图16】 --- 各故障类别(F0、F1、F2、F3、F4、F5、F9、F10)的示波器实验波形
7.1 实验诊断结果
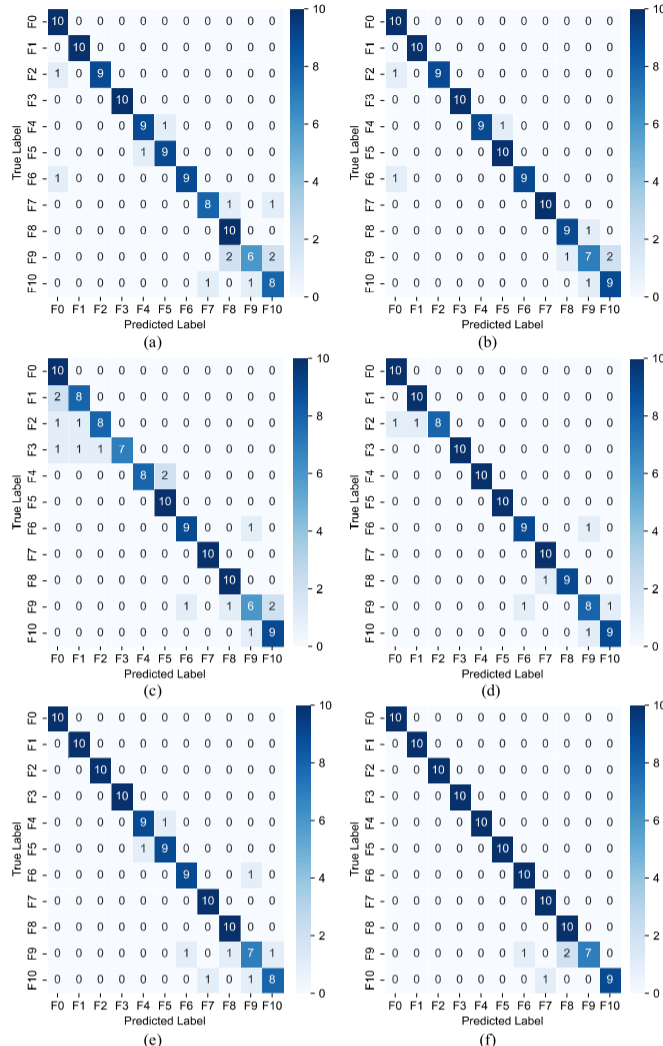
📌 【配图:图17(a)--(f)】 --- 六种模型的混淆矩阵(FB_CNN、FB_FCN、FB_LSTM、FB_BiLSTM、FB_CLSTM、FB_FCN-LSTM)
各模型的实验诊断准确率汇总如下:
| 模型 | 实验诊断准确率 |
|---|---|
| FB_CNN | 89.09% |
| FB_FCN | 92.73% |
| FB_LSTM | 86.36% |
| FB_BiLSTM | 93.64% |
| FB_CLSTM | 92.73% |
| FB_FCN-LSTM(本文方法) | 96.36% |
本文提出的模型取得了最高的实验诊断准确率,进一步验证了方法的有效性和鲁棒性。
值得注意的是:在混淆矩阵分析中,F9 类别的分类错误率相对较高。作者认为这是由于 F9 故障特征提取难度较大,建议未来研究中增加 F9 类别的样本数量以改善其分类性能。
7.2 识别灵敏度雷达图分析
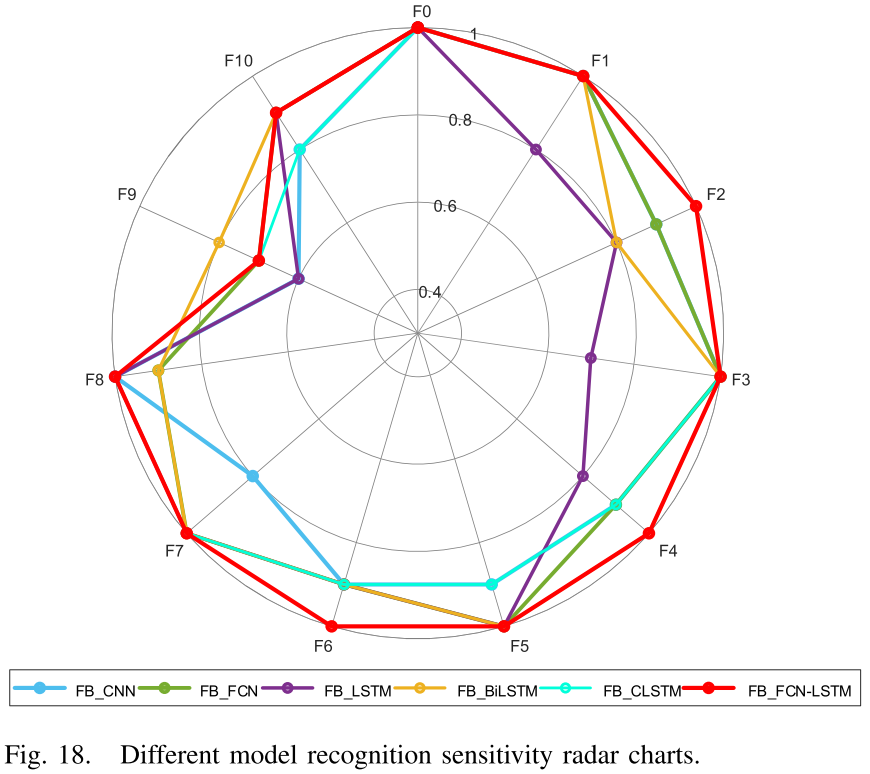
【图18】 --- 不同模型对各故障类别的识别灵敏度雷达图
从雷达图可以清晰看出,本文方法对绝大多数故障类别的识别灵敏度均高于对比模型,仅 F9 类别略低于 FB_BiLSTM,充分证明了本文方法在多类别故障识别中的综合优越性。
八、结论与展望
主要贡献总结
本文针对电动汽车直流充电桩开路故障诊断问题,提出了一种基于多特征融合深度学习模型的诊断方法,主要贡献如下:
- 首次引入前后级双路特征融合:通过将前级三相电流与后级变压器电流融合为2D张量,解决了单路信号诊断模糊的根本问题,无噪声诊断准确率从81.45%提升至99.55%;
- 并行时空特征提取架构:FCN提取空间特征与BiLSTM提取时序特征并行运行,兼具高精度与快速收敛,优于串联方案(CLSTM);
- 无需物理建模和人工特征选择:完全依赖历史测量数据,降低了模型-现实失配的可能性,适应充电桩多样化拓扑;
- 优异的抗噪性能:在SNR=3dB极端噪声下仍保持92.73%的准确率,平均准确率97.36%为对比模型中最高。
未来工作方向
- 开发主机软件,优化程序,实现实时在线故障诊断(目前为离线采集诊断);
- 探索仿真数据与真实数据混合训练,进一步提升模型的泛化能力;
- 针对 F9 类别识别不足的问题,增加该类别样本数量以改善分类性能。
附:模型结构速览
输入
├─ iLa, iLb, iLc(前级三相电流)
└─ iT(后级变压器电流)
│
[前后级特征融合模块]
合并为 2D 张量 FFB
│
┌────┴────┐
│ │
[FCN] [BiLSTM]
空间特征Fs 时序特征Ft
│ │
└────┬────┘
[拼接 Concatenate]
│
[全连接层 + Softmax]
│
故障分类结果(F0--F10,共11类)