案例:G(s)=2/s(0.5s+1),T=0.5 s,设计单位速度输入下的最小拍控制器
适用对象:已学过采样控制、脉冲传递函数与数字控制器基础的初学者
学习目标
-
理解"最小拍"的本质:让输出在有限个采样拍内达到目标。
-
掌握单位速度输入(斜坡输入)最小拍控制器的设计条件。
-
会做本题:先求脉冲传递函数,再选闭环传递函数,最后反求 D(z)。
-
会判断闭环稳定性,并能用 MATLAB 做响应验证。
一、最小拍控制的基本原理
1. 什么叫"最小拍"
最小拍控制(Deadbeat Control)的核心思想是:把闭环极点尽量配置在原点附近,使系统在有限个采样周期内准确到达目标值,并在之后保持不变。对数字系统而言,这类系统的响应不是"渐进收敛",而是"有限拍到位"。
而不同输入信号,其 Z 变换形式不同,所以闭环误差传递函数 E(z) 的设计形式也不同,常常就会出现你说的

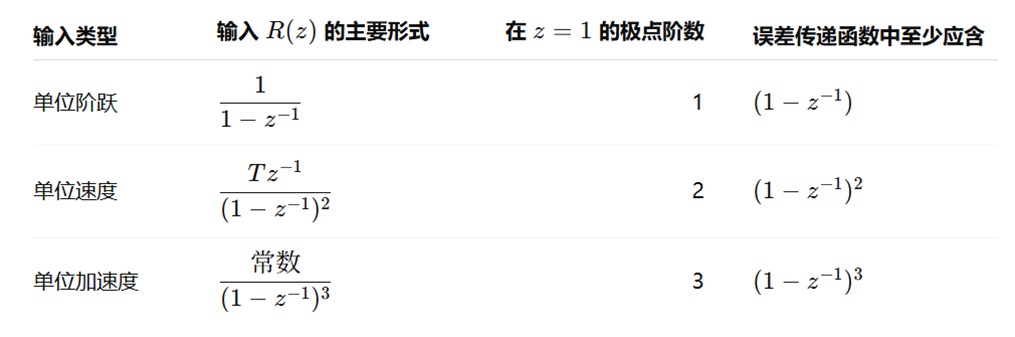

在最小拍控制系统设计中,不同输入信号的跟踪要求决定了闭环误差传递函数的结构形式。对于单位阶跃输入,输入 Z变换含有一阶因子 (1−z−1)−1 ,因此误差传递函数中至少应包含 (1−z−1) ;对于单位速度输入,输入 Z 变换含有二阶因子 (1−z−1)−2 ,因此误差传递函数中至少应包含 (1−z−1)2;对于单位加速度输入,输入 Z变换含有三阶因子 (1−z−1)−3,因此误差传递函数中至少应包含 (1−z−1)3。这样设计后,输入信号中的极点可被误差传递函数中的零点抵消,从而使误差成为有限项序列,实现有限拍无误差跟踪。这正是最小拍控制中误差系统设计的核心思想。
2. 为什么本题与"单位速度输入"有关
单位速度输入就是斜坡输入 r(t)=t。采样后有 r(k)=kT。若希望对斜坡输入实现有限拍跟踪,则闭环误差传递函数必须至少含有 (1-z^{-1})^2 因子;直观上,这相当于不仅要对常值量无静差,还要对线性增长输入也能在有限步后消除误差。
3. 本题的设计思想
本题采用"先选理想闭环,再反求控制器"的设计思路:
(1)先把连续对象经零阶保持器离散化,得到脉冲传递函数 G(z);
(2)根据单位速度输入最小拍跟踪条件,选取闭环传递函数 Φ(z)=Y(z)/R(z);
(3)由 Φ(z)=D(z)G(z)/1+D(z)G(z) 反求 D(z);
(4)最后分析闭环稳定性和跟踪效果。
2. 为什么本题与"单位速度输入"有关
单位速度输入就是斜坡输入 r(t)=t。采样后有 r(k)=kT。若希望对斜坡输入实现有限拍跟踪,则闭环误差传递函数必须至少含有 (1-z^{-1})^2 因子;直观上,这相当于不仅要对常值量无静差,还要对线性增长输入也能在有限步后消除误差。
3. 本题的设计思想
本题采用"先选理想闭环,再反求控制器"的设计思路:
(1)先把连续对象经零阶保持器离散化,得到脉冲传递函数 G(z);
(2)根据单位速度输入最小拍跟踪条件,选取闭环传递函数 Φ(z)=Y(z)/R(z);
(3)由 Φ(z)=D(z)G(z)/1+D(z)G(z) 反求 D(z);
(4)最后分析闭环稳定性和跟踪效果。
二、题目与求解思路
题目:已知连续对象
G(s)=2 / s(0.5s+1) ,采样周期 T=0.5 s,设计单位速度输入下的最小拍控制器。
求解思路:
|--------------|---------------------------------------------|
| 步骤 1 | 将对象改写为便于离散化的形式,并求 ZOH 条件下的脉冲传递函数。 |
| 步骤 2 | 把 G(z) 写成 q=z^{-1} 形式,提取出"纯延迟 + 动态多项式"的结构。 |
| 步骤 3 | 针对单位速度输入,构造最小拍闭环传递函数 Φ(q),使误差有限拍为零。 |
| 步骤 4 | 由 D(q)=Φ(q)/G(q)(1-Φ(q)) 求出控制器。 |
| 步骤 5 | 分析闭环稳定性、控制器特性及 MATLAB 验证方法。 |
三、步骤1:求对象的脉冲传递函数 G(z)
先将连续对象整理为:
G(s)=2 / s(0.5s+1) = 4 / s(s+2)
在零阶保持器作用下,采样周期 T=0.5 s。令 q=z^{-1},并记 a=e^{-1}≈0.367879。由 ZOH 离散化可得对象的脉冲传递函数为:
G(z)= a z\^{-1} + (1-2a) z\^{-2} / 1-(1+a)z\^{-1}+a z\^{-2}
也可写成 q 形式:
G(q)= q a + (1-2a)q / (1-q)(1-aq)
其中 a=e^{-1}=0.367879,因而:
G(q)= q (0.367879 + 0.264241 q) / (1-q)(1-0.367879 q)
说明:对象本身带一个积分环节,因此离散后分母中自然出现 (1-q) 因子。这也是后续能够对速度输入进行有限拍跟踪的重要基础。
四、步骤2:根据"单位速度输入最小拍"构造闭环传递函数
1. 速度输入的离散表达式
单位速度输入 r(t)=t,采样后 r(k)=kT,其 Z 变换可写成:
R(q)= T q / (1-q)^2
2. 最小拍跟踪条件
若希望误差在有限拍后完全为零,则
E(q)= 1-Φ(q) R(q)
必须成为有限项多项式。由于 R(q) 含有 (1-q)^{-2},因此 1-Φ(q) 至少应包含 (1-q)^2 因子。为得到"最短"有限拍响应,取最简单的形式:
1-Φ(q) = (1-q)^2
故有:
Φ(q)=1-(1-q)^2 = 2q-q^2
这意味着闭环输出满足
Y(q)=Φ(q)R(q),即 y(k)=2r(k-1)-r(k-2)
对斜坡输入 r(k)=kT 来说,当 k≥2 时:
y(k)=2(k-1)T-(k-2)T = kT = r(k)
因此系统在 2 个采样拍后实现无误差跟踪,这正是"单位速度输入最小拍控制"的含义。
五、步骤3:由闭环传递函数反求最小拍控制器 D(z)
闭环关系为:
Φ(q)= D(q)G(q) / 1 + D(q)G(q)
故控制器可写为:
D(q)= Φ(q) / { G(q)1-Φ(q) }
把 Φ(q)=2q-q^2、1-Φ(q)=(1-q)^2 以及 G(q)= qa+(1-2a)q/(1-q)(1-aq) 代入,得到:
D(q)= (1-aq)(2-q) / { a+(1-2a)q(1-q) }
其中 a=e^{-1}=0.367879。写成数值形式:
D(q)= 2 -1.7357589 q +0.3678794 q\^2 / 0.3678794 -0.1036383 q -0.2642411 q\^2
换回 z^{-1} 形式:
D(z)= 2 -1.7357589 z\^{-1} +0.3678794 z\^{-2} / 0.3678794 -0.1036383 z\^{-1} -0.2642411 z\^{-2}
六、步骤4:写成差分方程,便于程序实现
由 U(z)=D(z)E(z) 可得:
0.3678794 -0.1036383 z\^{-1} -0.2642411 z\^{-2}U(z)
= 2 -1.7357589 z\^{-1} +0.3678794 z\^{-2}E(z)
对应时域差分方程为:
0.3678794 u(k) -0.1036383 u(k-1) -0.2642411 u(k-2)
= 2e(k) -1.7357589 e(k-1) +0.3678794 e(k-2)
若化成递推实现形式:
u(k)=0.2817182 u(k-1) +0.7182818 u(k-2)
+5.4365637 e(k) -4.7182818 e(k-1) +1.0000000 e(k-2)
这就是可直接用于程序编写的最小拍控制器算法。
七、稳定性与控制品质分析
1. 闭环稳定性
本题中选取的闭环传递函数为 Φ(q)=2q-q^2=q(2-q)。其闭环特征由 1-Φ(q)=(1-q)^2 给出,从响应角度看,输出误差在有限拍内归零,闭环是稳定的,并且具有严格的有限拍跟踪性质。
2. 为什么说"2拍后跟踪到位"
因为 y(k)=2r(k-1)-r(k-2)。对斜坡输入 r(k)=kT 而言,从 k=2 开始,输出就与输入完全相等,所以误差只在开始的 2 个采样时刻存在。
3. 实际工程中的注意事项
最小拍控制虽然快,但一般有三个常见问题:
(1)控制作用较猛,初始控制量可能偏大;
(2)对模型误差敏感,一旦对象参数变化,有限拍性质会被破坏;
(3)控制器中往往带有 z=1 附近的极点或积分特性,数值实现时应注意饱和与抗积分饱和。
八、MATLAB 验证代码
% 最小拍控制器设计验证
clear; clc; close all;
Ts = 0.5;
a = exp(-1);
% 对象脉冲传递函数 G(z)
numG = [0 a (1-2*a)];
denG = [1 -(1+a) a];
Gz = tf(numG, denG, Ts, 'variable', 'z^-1');
% 最小拍控制器 D(z)
numD = [2 -(1+2*a) a];
denD = [a (1-3*a) (2*a-1)];
Dz = tf(numD, denD, Ts, 'variable', 'z^-1');
% 闭环系统
Phi = feedback(Dz*Gz, 1);
% 单位速度输入:r(k)=k*Ts
N = 20;
t = (0:N-1)'*Ts;
r = t; % 单位速度输入
y = lsim(Phi, r, t);
% 绘图
stairs(t, r, 'k--', 'LineWidth', 1.2); hold on;
stairs(t, y, 'b', 'LineWidth', 1.8);
grid on;
xlabel('Time (s)');
ylabel('Output');
legend('r(k)=kT','y(k)');
title('单位速度输入下的最小拍跟踪响应');
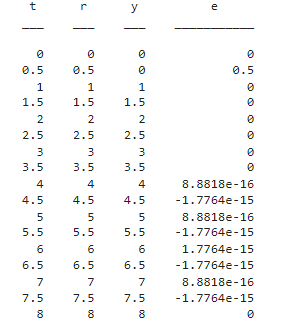
% 观察误差
e = r - y;
disp(table(t, r, y, e));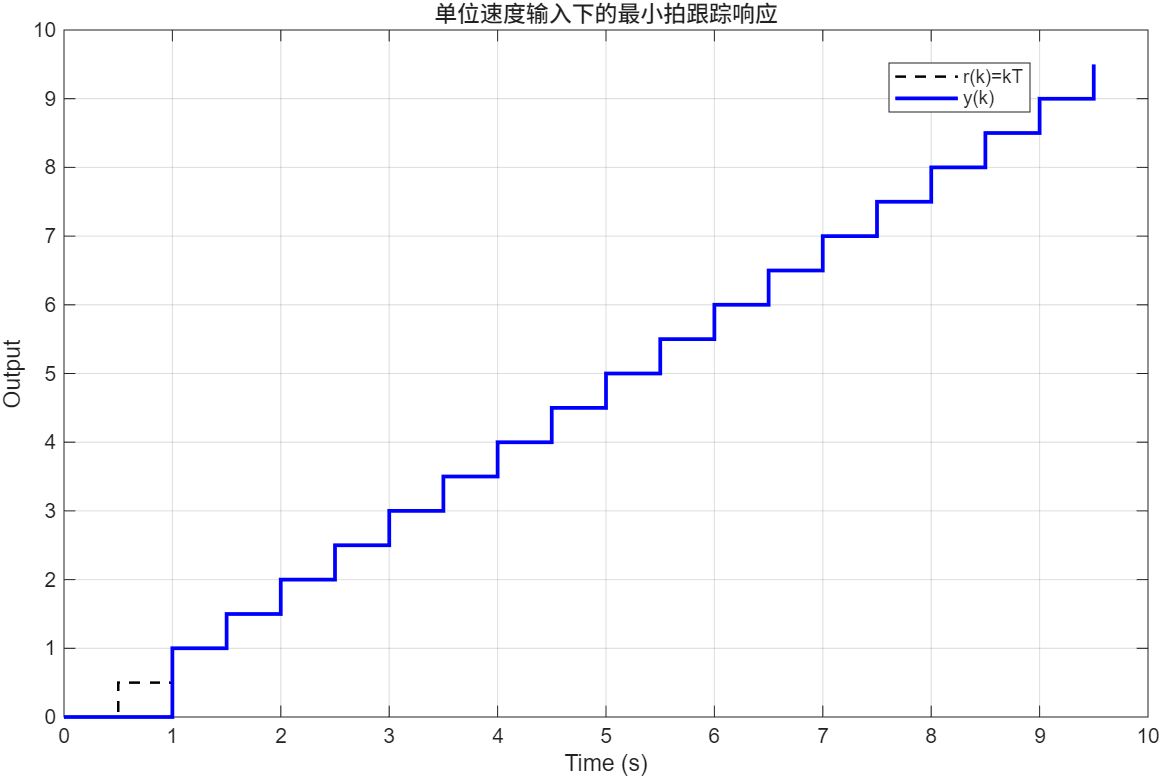
九、总结
|-----------|-----------------------------------------------|
| 本题对象 | 连续对象先经 ZOH 离散化,写成 G(q)=qB(q)/A(q) 的形式。 |
| 本题关键 | 因为输入是单位速度输入,故 1-Φ(q) 至少要含有 (1-q)^2。 |
| 最短设计 | 取 1-Φ(q)=(1-q)^2,可得 Φ(q)=2q-q^2,实现 2 拍无差跟踪。 |
| 控制器求法 | 用 D(q)=Φ(q)/G(q)(1-Φ(q)) 反求,再写成差分方程实现。 |
要点:
先离散,后选闭环;斜坡输入看平方;误差有限拍为零,再反推得控制器。