四旋翼无人机凭借结构简洁、机动性能优异、悬停效果良好的特点,在科研、工业、军用等诸多领域得到了广泛应用。但该设备本质上属于强耦合、多输入多输出(MIMO)的高度非线性欠驱动系统,仅依靠经验调参的方式,难以让系统获得鲁棒稳定性与可预测的动态性能。因此,为了在保障系统可控、可分析的前提下开展控制器设计,常规思路是在悬停工作点附近对无人机动力学进行小扰动线性化建模,再将连续线性模型离散化,最终在离散时间域完成控制律的设计与实现。
本文围绕四旋翼无人机控制展开研究,先基于经典六自由度刚体动力学构建其连续非线性模型,在悬停平衡点完成小角度线性化后,得到含12个状态、4个输入的连续线性化模型;随后采用零阶保持(ZOH)方法对其进行精确离散化,得到离散状态空间模型,并借助离散矩阵F与G分析系统可控性、特征值分布及数值稳定性,同时通过给四个输入通道施加单位脉冲,获取系统响应特性。在此基础上,搭建四通道增量式PID控制器,该控制器包含高度、偏航角的单环控制,以及位置---姿态串级控制,采用增量式PID的离散表达形式,同时加入输出限幅与简化抗积分饱和策略。最后通过完整的MATLAB仿真,验证该控制结构可实现无人机平稳悬停及半径2m的圆形轨迹跟踪任务,并结合仿真曲线,分析模型线性化假设、采样周期以及增益整定对系统性能的影响。
一、四旋翼无人机动力学模型
1.1 刚体动力学基础
四旋翼无人机可被视作拥有三个平动自由度(位置x、y、z)和三个转动自由度(滚转ϕ\phiϕ、俯仰θ\thetaθ、偏航ψ\psiψ)的刚体系统,设定固连于无人机的机体坐标系B,以及地面固定的惯性坐标系I。
分别定义位置向量pI=x, y, z⊤\mathbf{p}_I = x,\\,y,\\,z^\toppI=x,y,z⊤、速度向量vI=p˙I\mathbf{v}_I = \dot{\mathbf{p}}_IvI=p˙I,采用Z-Y-X欧拉角描述姿态,角速度向量为ω=p, q, r⊤\boldsymbol{\omega} = p,\\,q,\\,r^\topω=p,q,r⊤。
机体所受作用力包含重力、四旋翼产生的总推力T以及平动阻尼,其受力平衡方程为:
mv˙I=R(η)00T−mge3−DvvIm\dot{\mathbf{v}}_I = R(\eta) \begin{bmatrix}0\\0\\ T\end{bmatrix} - mg\mathbf{e}_3 - D_v\mathbf{v}_Imv˙I=R(η) 00T −mge3−DvvI
旋翼产生的三个力矩构成转动动态方程:
Jω˙=τ−ω×(Jω)−DωωJ\dot{\boldsymbol{\omega}} = \boldsymbol{\tau} - \boldsymbol{\omega} \times (J\boldsymbol{\omega}) - D_\omega\boldsymbol{\omega}Jω˙=τ−ω×(Jω)−Dωω
上述模型为非线性形式,无法直接应用于线性控制设计,因此需要在悬停条件下对其进行线性化处理。
1.2 悬停工作点与小扰动线性化
无人机悬停时保持水平姿态并定点静止,此时满足ϕ0=0,θ0=0,ψ0=ψ0,vI0=0,ω0=0,T0=mg\phi_0 = 0, \quad \theta_0=0, \quad \psi_0 = \psi_0,\quad \mathbf{v}_{I0}=0, \quad \boldsymbol{\omega}_0 = 0,\quad T_0 = mgϕ0=0,θ0=0,ψ0=ψ0,vI0=0,ω0=0,T0=mg。
针对位置、速度、姿态角和角速度定义增量变量δx=x, y, z, vx, vy, vz, ϕ, θ, ψ, p, q, r⊤\delta\mathbf{x} = x,\\,y,\\,z,\\,v_x,\\,v_y,\\,v_z,\\,\\phi,\\,\\theta,\\,\\psi,\\,p,\\,q,\\,r^\topδx=x,y,z,vx,vy,vz,ϕ,θ,ψ,p,q,r⊤,对输入定义增量δu=δT, τϕ,τθ,τψ⊤\delta\mathbf{u} = \\delta T,\\,\\tau_\\phi,\\tau_\\theta,\\tau_\\psi^\topδu=δT,τϕ,τθ,τψ⊤。
通过小角度近似(sinϕ≈ϕ,cosϕ≈1\sin\phi\approx \phi, \cos\phi\approx 1sinϕ≈ϕ,cosϕ≈1)推导,得到连续线性系统:
δx˙=Acδx+Bcδu\delta\dot{\mathbf{x}} = A_c\delta\mathbf{x} + B_c \delta\mathbf{u}δx˙=Acδx+Bcδu
其中矩阵结构为:
Ac=03×3I3000−1mDvAmv0000I3000−J−1DωA_c=\begin{bmatrix} 0_{3\times3} & I_3 & 0 & 0 \\ 0 & -\frac{1}{m}D_v & A_{mv} & 0 \\ 0&0&0&I_3\\ 0&0&0& -J^{-1}D_\omega \end{bmatrix}Ac= 03×3000I3−m1Dv000Amv0000I3−J−1Dω
Amv=0g0−g00000,Bc=001×31m01×3001×30J−1A_{mv}=\begin{bmatrix} 0 & g & 0 \\ -g & 0 & 0 \\ 0 & 0 & 0 \end{bmatrix}, \quad B_c= \begin{bmatrix} 0 & 0_{1\times3} \\ \frac{1}{m} & 0_{1\times3} \\ 0 &0_{1\times3}\\ 0 & J^{-1} \end{bmatrix}Amv= 0−g0g00000 ,Bc= 0m10001×301×301×3J−1
该12×12维度的模型,能够完整描述无人机在悬停附近的平动与姿态动态特性。
二、ZOH离散化与开环特性分析
2.1 精确ZOH离散化
设定采样周期Ts=0.01 sT_s=0.01 \text{ s}Ts=0.01 s,规定输入在每个采样周期内保持常值,通过ZOH离散化可得:
F=eAcTs,G=∫0TseAcτBc dτF = e^{A_cT_s}, \quad G = \int_0^{T_s}e^{A_c\tau}B_c\,d\tauF=eAcTs,G=∫0TseAcτBcdτ
借助MATLAB的c2d函数可实现上述离散化过程,得到精确的离散矩阵F和G,该矩阵将应用于后续所有离散仿真环节。
2.2 特征值与数值稳定性
通过MATLAB计算得出,离散线性模型的所有特征值均位于单位圆内部或边界附近,谱半径ρ(F)=max∣λi(F)∣≈0.9996\rho(F) = \max |\lambda_i(F)| \approx 0.9996ρ(F)=max∣λi(F)∣≈0.9996,这表明该离散线性模型处于数值稳定/临界稳定状态,满足开环系统不发散的基本要求。
若将采样周期增大至Ts=0.05 sT_s=0.05 \text{ s}Ts=0.05 s,部分极点会越过单位圆,导致离散系统呈现不稳定状态。这一现象说明,采样周期对线性化离散系统的稳定性影响显著,是后续控制器选频带时需要重点关注的因素。
2.3 可控性分析
构建离散可控性矩阵C=G,FG,F2G,...,F11G\mathcal{C} = G, FG, F\^2G, \\dots,F\^{11}GC=G,FG,F2G,...,F11G,计算得其秩rank(C)=12=n\text{rank}(\mathcal{C}) = 12 = nrank(C)=12=n,说明四个输入对全部12维状态具备完全可控性。尽管从物理层面来看,四旋翼无人机属于欠驱动系统(平动方向仅能通过角度间接控制),但其一阶线性化模型仍具备数学意义上的可控性。
2.4 四通道单位脉冲响应
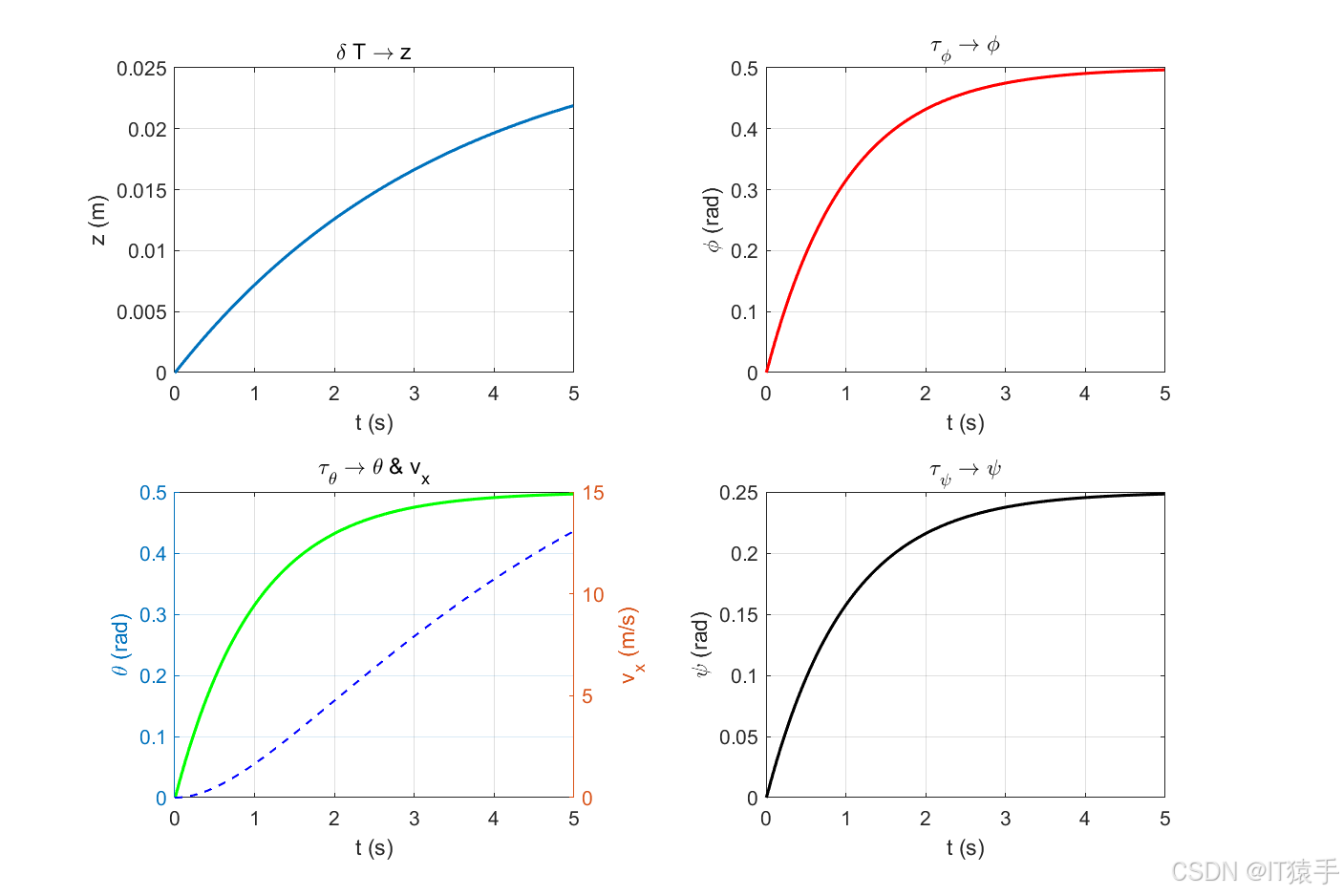
为探究输入对系统状态的影响,给四个输入通道分别施加1个采样周期的单位脉冲,通过MATLAB仿真得到各通道响应特性:
- δT→z\delta T\to zδT→z通道:高度z对总推力增量呈现典型的二阶系统响应,初始阶段加速度最大,后续受平动阻尼影响逐渐下降,体现出垂向惯性特性;
- τϕ→ϕ\tau_\phi\to\phiτϕ→ϕ通道:滚转角随力矩呈一阶上升趋势,随后逐渐衰减,响应速度显著快于平动状态,表明姿态内环本身为高带宽子系统;
- τθ→(θ,vx)\tau_\theta\to(\theta, v_x)τθ→(θ,vx)耦合:俯仰角脉冲会导致θ\thetaθ快速变化,同时使vxv_xvx产生耦合加速,这正是无人机"前倾加速"的物理机制,也直观体现了线性化模型中耦合矩阵AmvA_{mv}Amv的实际动态效果;
- τψ→ψ\tau_\psi\to\psiτψ→ψ通道:偏航角的响应速度相较于滚转、俯仰明显更慢,原因是无人机的偏航惯量通常更大。
三、增量式PID控制原理与离散实现
3.1 增量式PID离散公式推导
离散PID的传递函数形式为:
C(z)=Kp+KiTs1−z−1+Kd1−z−1TsC(z)=K_p+\frac{K_i T_s}{1-z^{-1}}+K_d\frac{1-z^{-1}}{T_s}C(z)=Kp+1−z−1KiTs+KdTs1−z−1
通过反z变换推导出其增量表达式:
Δuk=Kp(ek−ek−1)+KiTsek+KdTs(ek−2ek−1+ek−2)\Delta uk = K_p(ek-ek-1) + K_iT_sek + \frac{K_d}{T_s}(ek-2ek-1+ek-2)Δuk=Kp(ek−ek−1)+KiTsek+TsKd(ek−2ek−1+ek−2)
控制量的更新公式为:
uk=uk−1+Δukuk = uk-1+\Delta ukuk=uk−1+Δuk
增量式PID具备数值稳定、抗偏置能力强的特点,还能避免因绝对值饱和导致的积分累积问题,是离散控制中应用最广泛的控制结构。
3.2 抗积分饱和策略
当控制量达到限幅范围umin≤u≤umaxu_{\min}\le u\le u_{\max}umin≤u≤umax时,若继续累积积分项,会出现积分饱和(windup)现象,表现为系统响应拖尾或震荡。本文采用简化的抗积分饱和策略:当控制量发生饱和时,令uk=usatuk = u_{\text{sat}}uk=usat,并使用饱和后的值更新PID状态,避免积分项继续累加。
3.3 串级控制结构设计
无人机的位置与姿态具有天然的快慢环特性:姿态(滚转、俯仰)动态响应快,适合作为控制内环;位置与速度动态响应慢,适合作为控制外环。
外环根据位置误差输出"虚拟加速度",再通过ax=gθa_x = g\thetaax=gθ、ay=−gϕa_y = -g\phiay=−gϕ得到期望姿态角,由内环快速跟踪该目标姿态;高度z与偏航ψ\psiψ则分别设计为两条独立的单环控制通道,最终形成四旋翼串级PID控制结构。
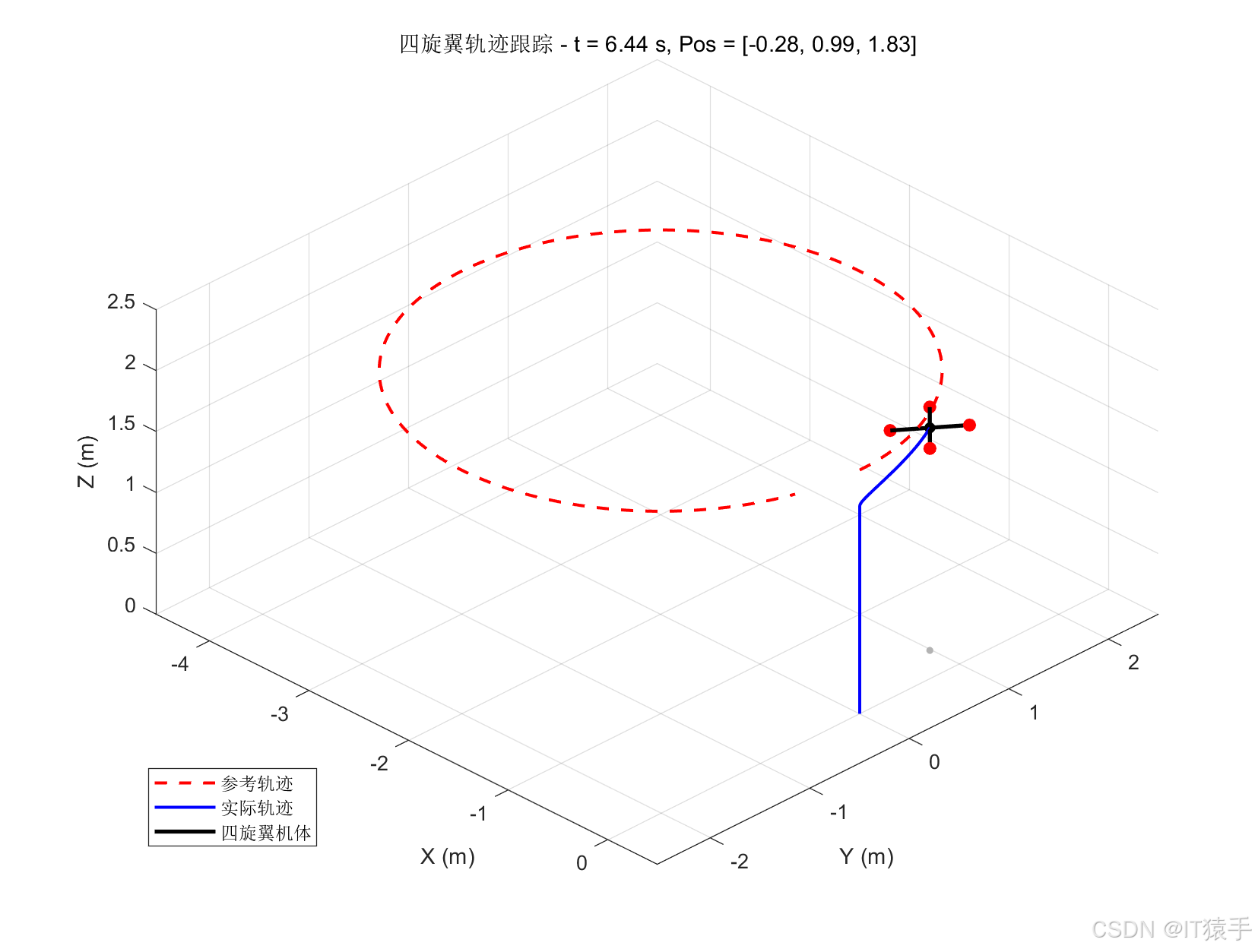
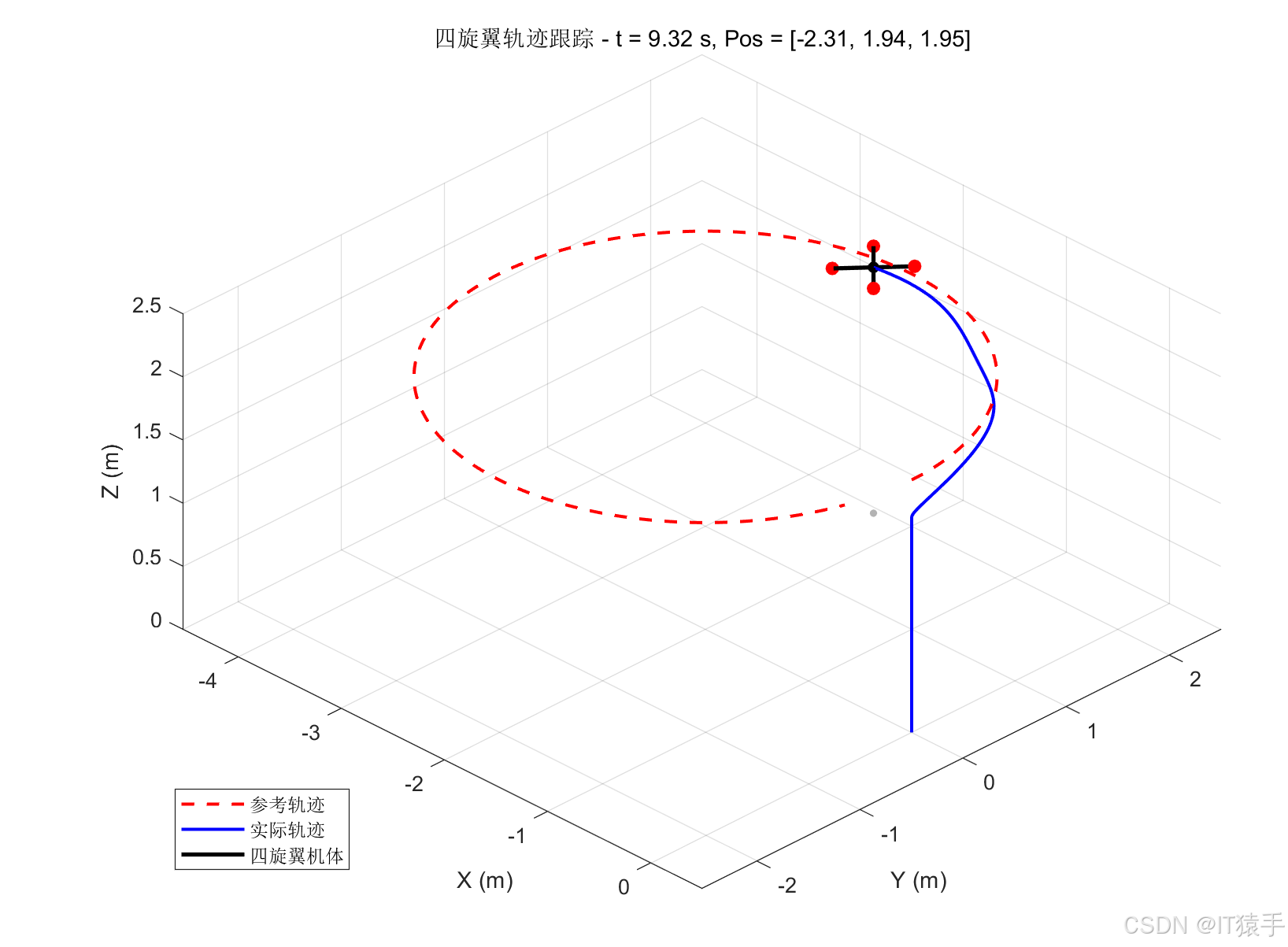
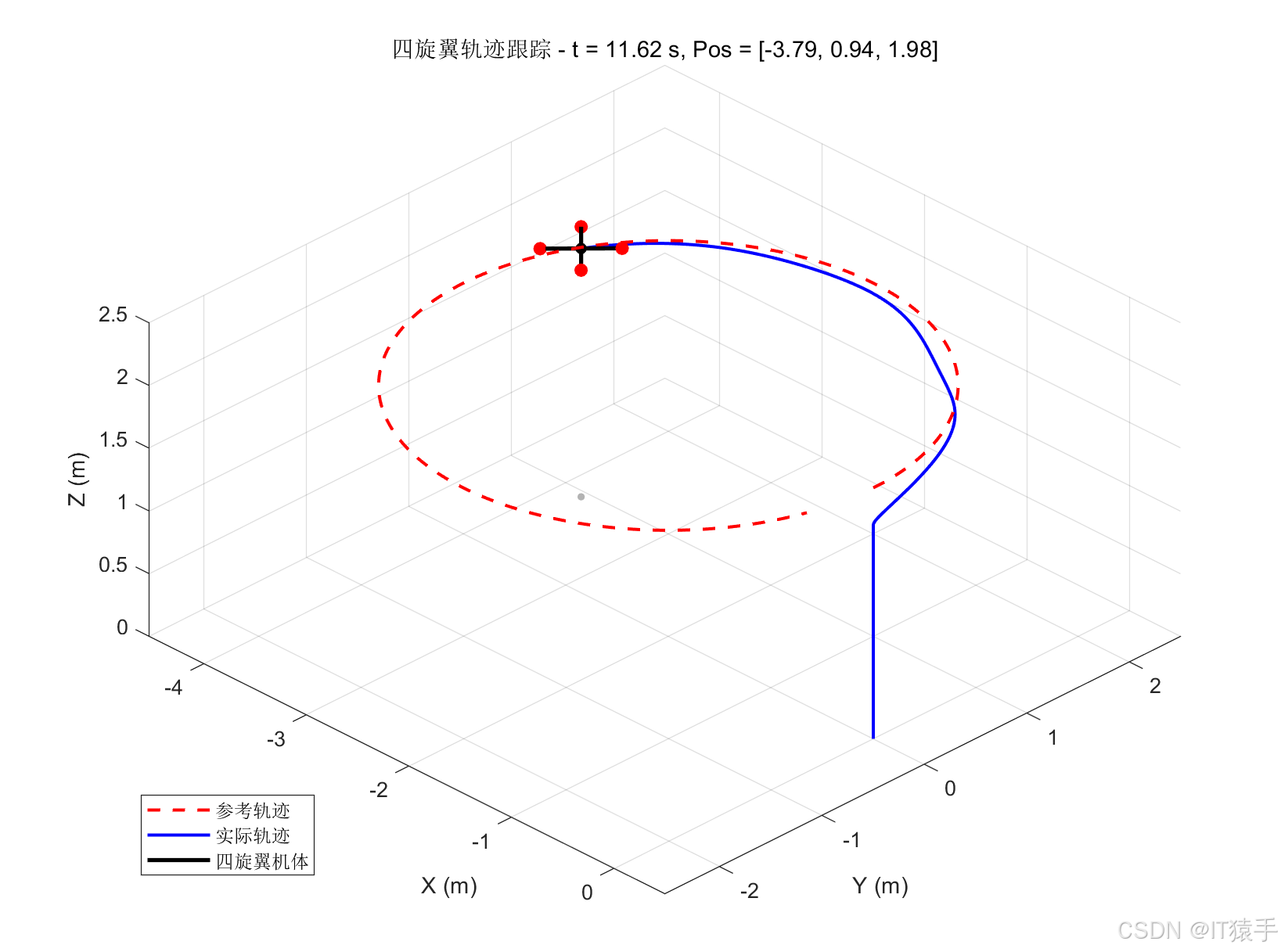
四、圆轨迹仿真实验
轨迹跟踪结果
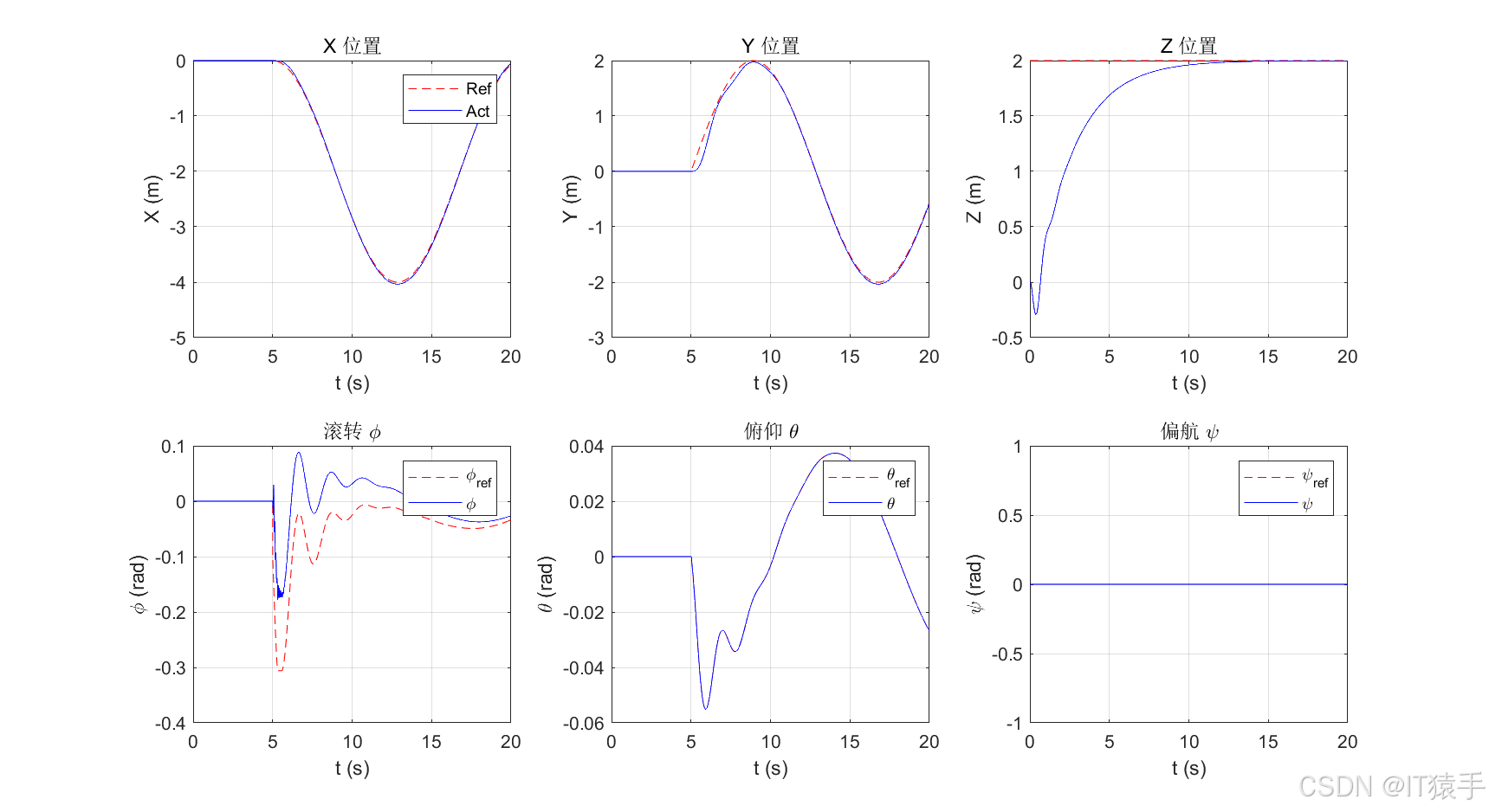
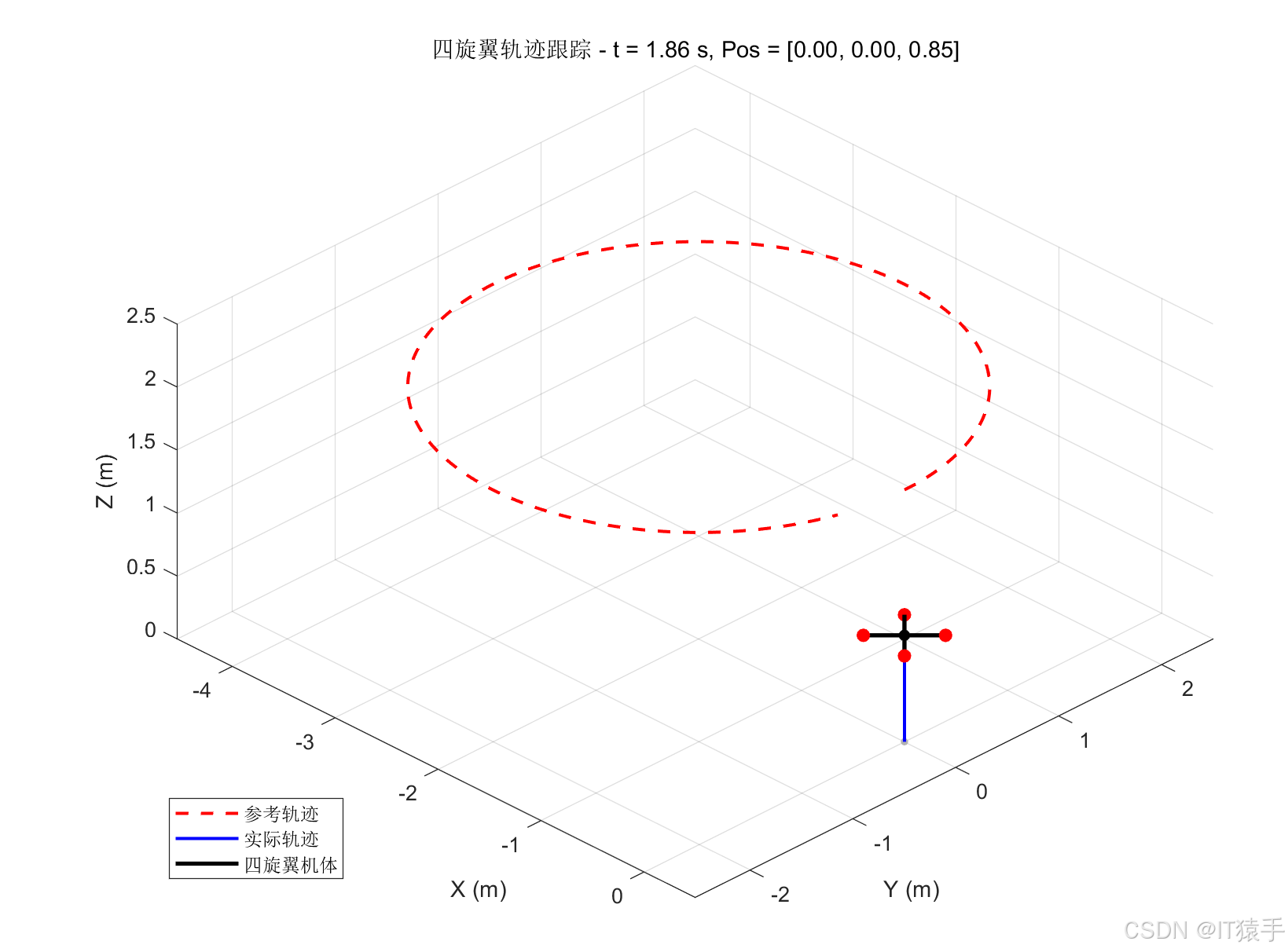
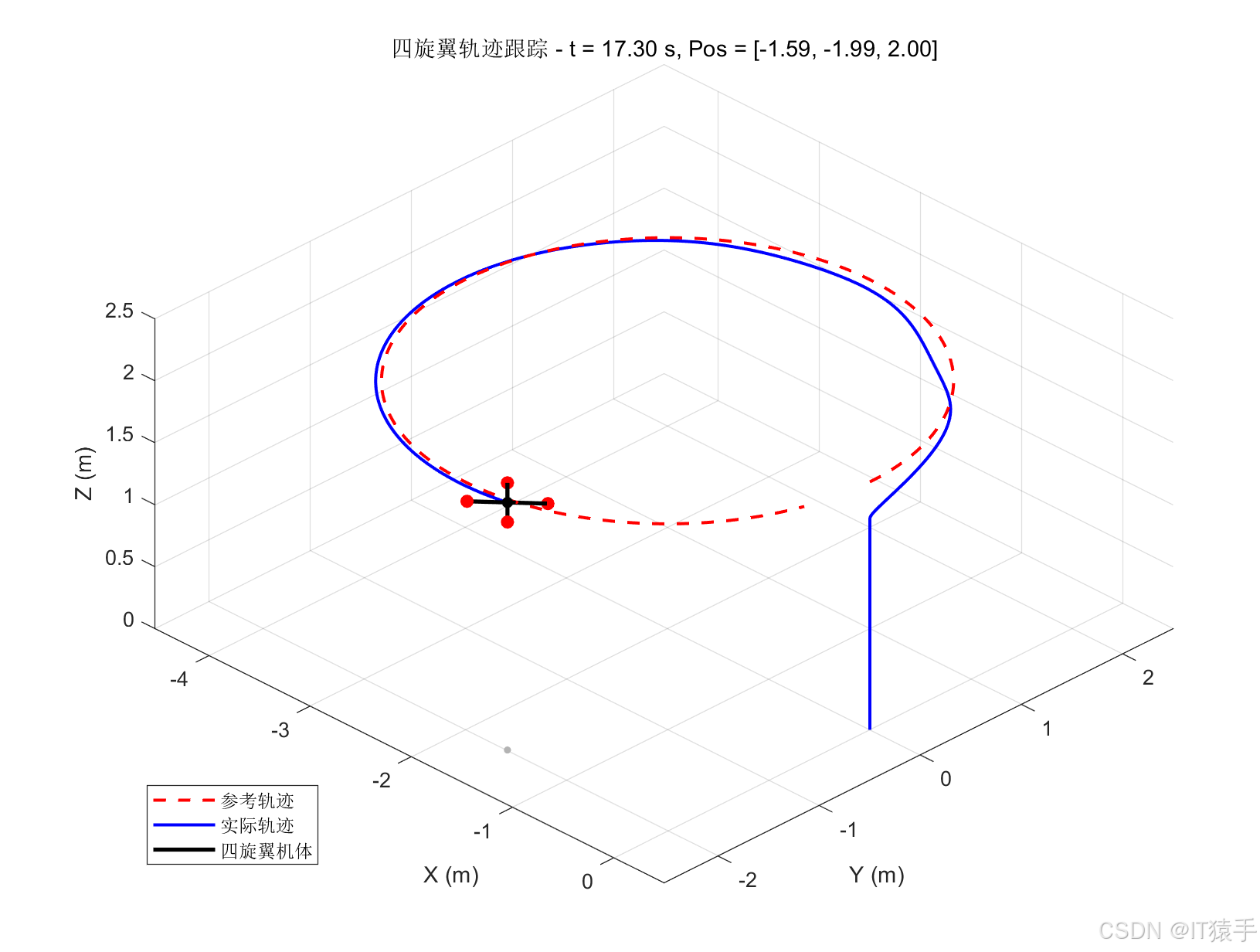
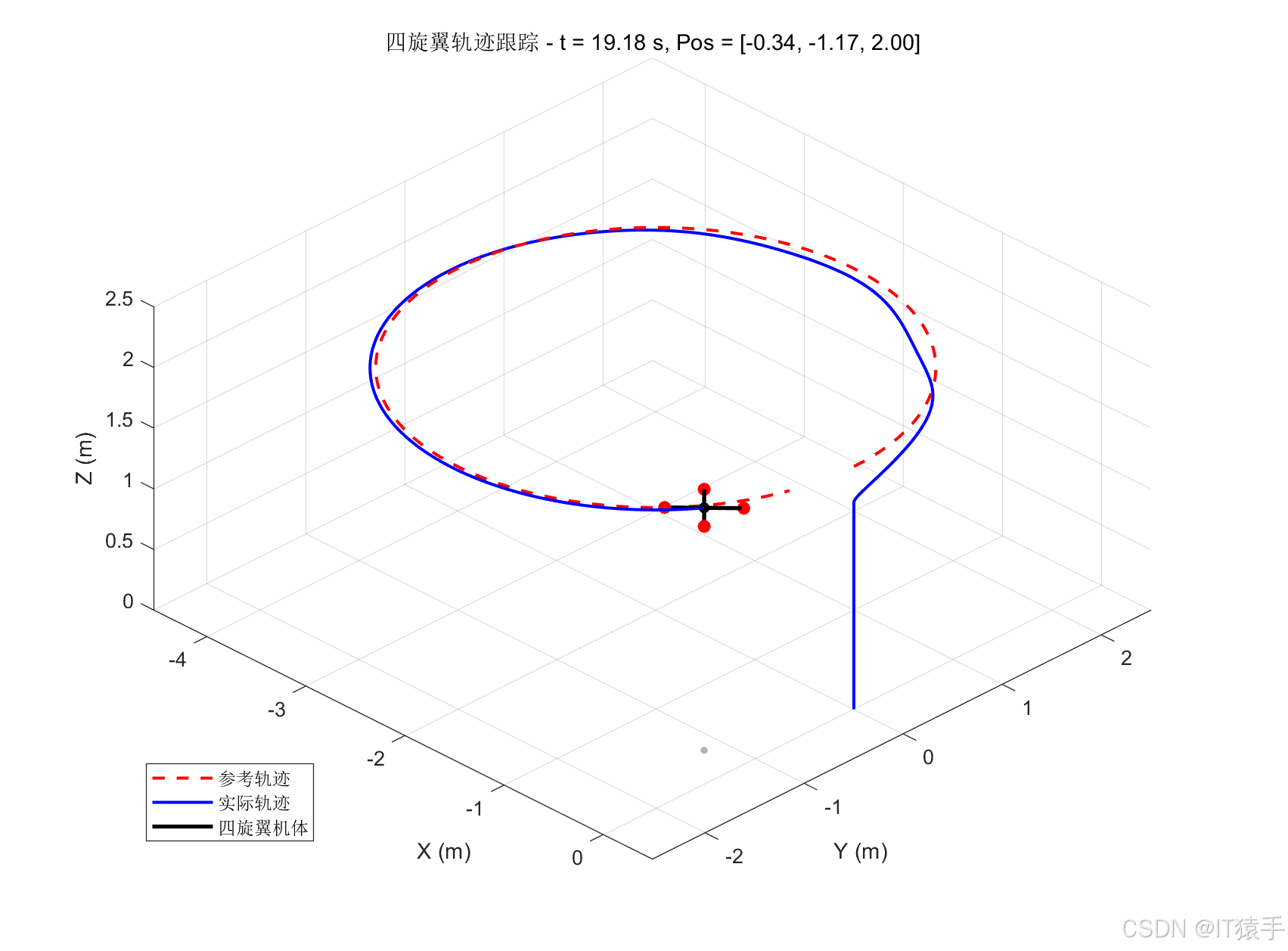
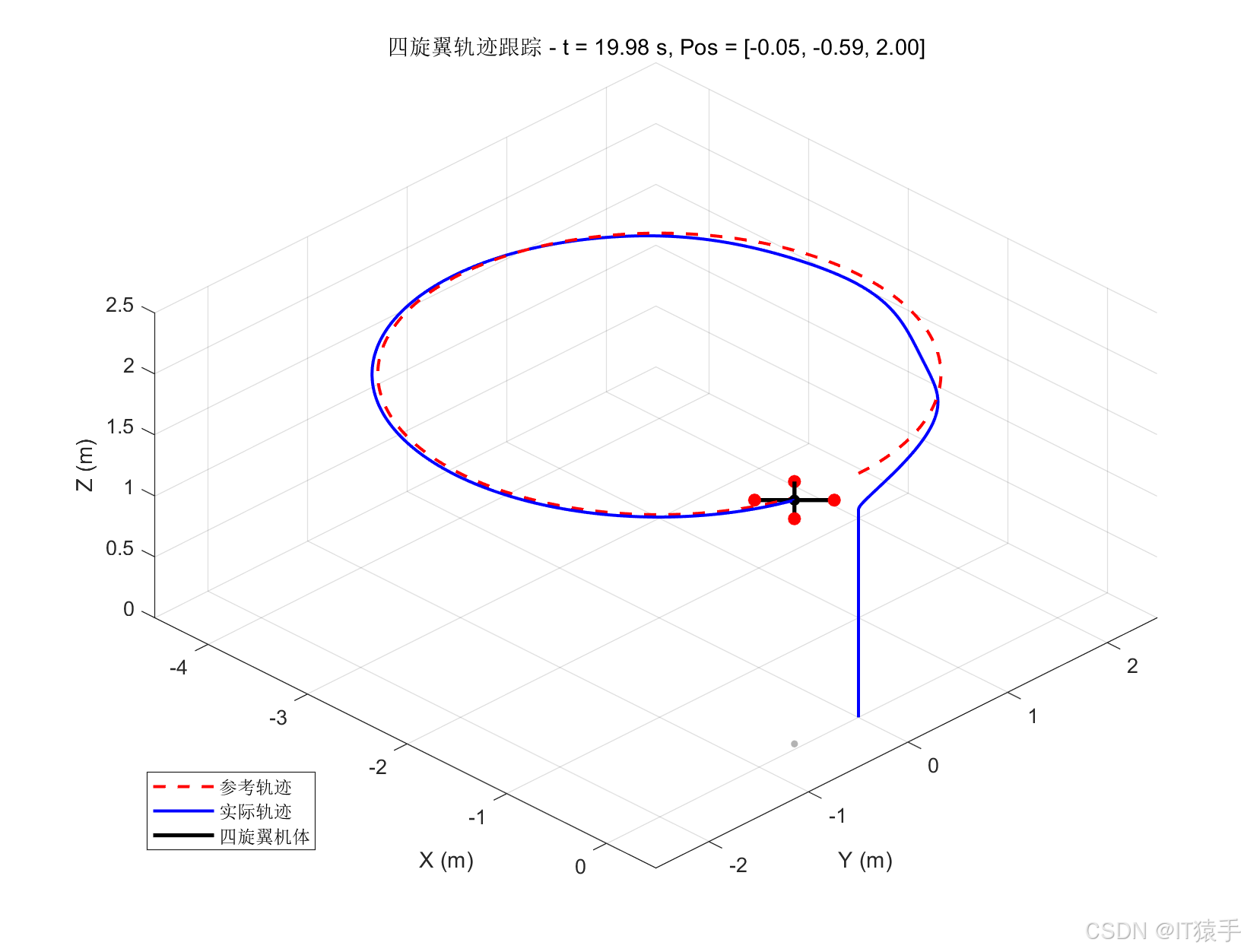
仿真实验中,从第5秒开始,将无人机参考轨迹切换为半径2m、角速度0.4rad/s的水平圆轨迹,高度保持2m不变。
3D轨迹曲线显示,无人机实际轨迹与参考轨迹高度吻合,仅在圆周起始处存在小幅加速段,这是由于圆轨迹速度从0突然变为RωR\omegaRω,导致外环输出较大加速度,属于物理层面的合理现象。
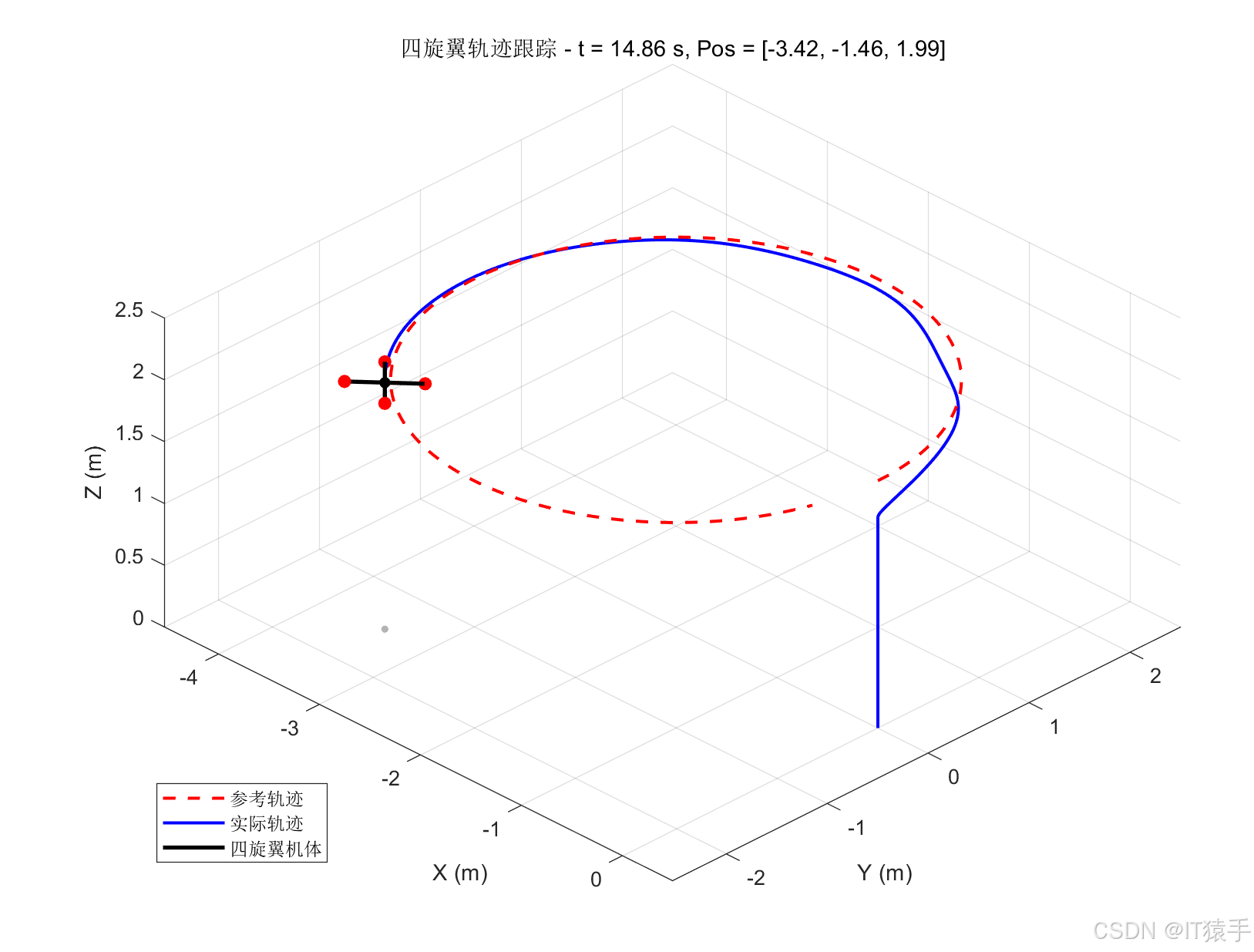
MSE误差
统计仿真第10秒之后的系统稳态误差,得到MSExy≈O(10−2) m2\text{MSE}_{xy} \approx O(10^{-2})\text{ m}^2MSExy≈O(10−2) m2,意味着无人机实际轨迹与参考轨迹的偏离仅为厘米级,验证了该控制结构具备较高的控制精度。
bash
稳态水平轨迹跟踪误差 MSE_xy = 0.0012 (m^2)五、结论
本文以四旋翼无人机为研究对象,在悬停点通过小角度线性化建立其连续动力学模型,并利用零阶保持(ZOH)方法将其转化为离散状态空间模型。基于该离散模型,设计了包含位置外环与姿态内环的增量式PID控制结构,通过MATLAB仿真完成了无人机平稳悬停与圆形轨迹跟踪两类典型任务的验证。
从脉冲响应、极点分布、跟踪误差及控制量变化等多方面的仿真结果可以得出:离散线性化模型对四旋翼无人机悬停附近的动态特性具有良好的局部描述能力;在合理设置增益的前提下,增量式PID控制策略能够让四旋翼无人机系统获得稳定、可靠的控制效果,实现高精度的轨迹跟踪与定点悬停。
同时,研究也发现采样周期、增益整定以及模型线性化假设等因素,会对系统控制性能产生显著影响,为后续四旋翼无人机控制器的优化设计提供了重要的参考依据。