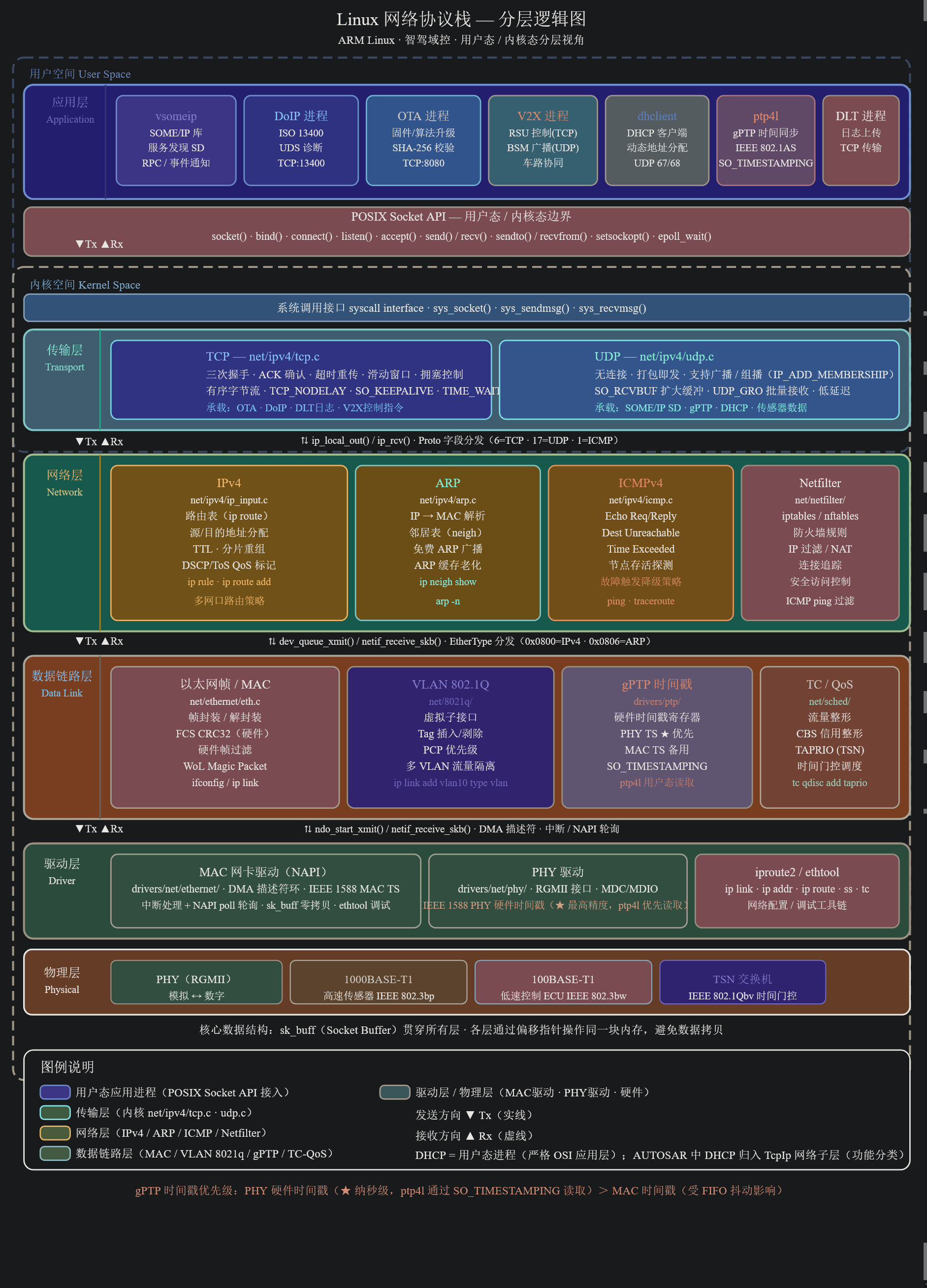
按照OSI模型分类:
应用层:
- SOME/IP & SD & RPC:服务化实时交互*(域内服务发现、远程调用,支撑智驾感知 / 决策 / 执行通信)*
- DoIP:车载诊断数据传输*(智驾域控 UDS 诊断)*
- OTA:域控固件 / 算法升级*(智驾功能远程迭代)*
- V2X:车路协同远程控制*(车外网联指令交互,依托 TCP 实现可靠指令传输)*
- DHCP:动态地址管理*(多传感器 ECU 上电自动分配 IP 地址,免手动配置)*
传输层:
- UDP 高频实时数据:不建立连接,打包就发,既可以点对点,也可以广播*(传感器融合数据,涉及* SOME/IP SD)
- TCP 可靠传输保障:先建立连接,点对点发送,不支持广播*(OTA软件更新、DoIP诊断通信、日志上传、远程控制 (V2X))*
网络层:
- IPv4 数据包路由:为 TCP/UDP 数据包分配源 / 目的地址,完成跨节点路由寻址*(域控统一编址,端到端跨网段寻址路由调度所有 ADAS 节点)*
- ICMP 车辆诊断:依附 IPv4 运行,反馈节点可达性与网络异常状态*(域控上电后通过 Ping 逐一探测各传感器 ECU 可达性,任一节点不通则上报故障并触发降级策略)*
数据链路层:
- ARP 局域网寻址:将 IPv4 地址解析为 MAC 地址,打通网络层到链路层的映射*(域控建立传感器 IP 与硬件地址映射表,通过 ARP 解析目标 IP 对应的 MAC 地址,确保数据送达指定节点)*
- VLAN 虚拟局域网隔离:域控内流量隔离与调度,VLAN 标签(802.1Q)直接插入 MAC 帧头的源地址字段*(将传感器实时数据、OTA 升级、诊断通信划分独立通道,互不干扰,保障 ADAS 感知数据始终优先传输)*
- MAC 控制器:数据封装为帧,按硬件地址完成节点间帧级收发*(每个Sensor以唯一 MAC 地址接入域控交换机,域控通过以太网地址寻址)*
- gPTP 时间同步:优先 PHY 的时间戳,其次在是 MAC 的时间戳*(智驾多传感器时序对齐,保障融合数据时间基准统一)*
物理层:
- PHY 收发器:通过 RGMII 接口将物理信号转换数字信号*(Sensor* 通过 1000BASE-T1 单对线接入域控,100BASE-T1 连接低速控制 ECU)
基于Linux的以太网协议栈逻辑图:
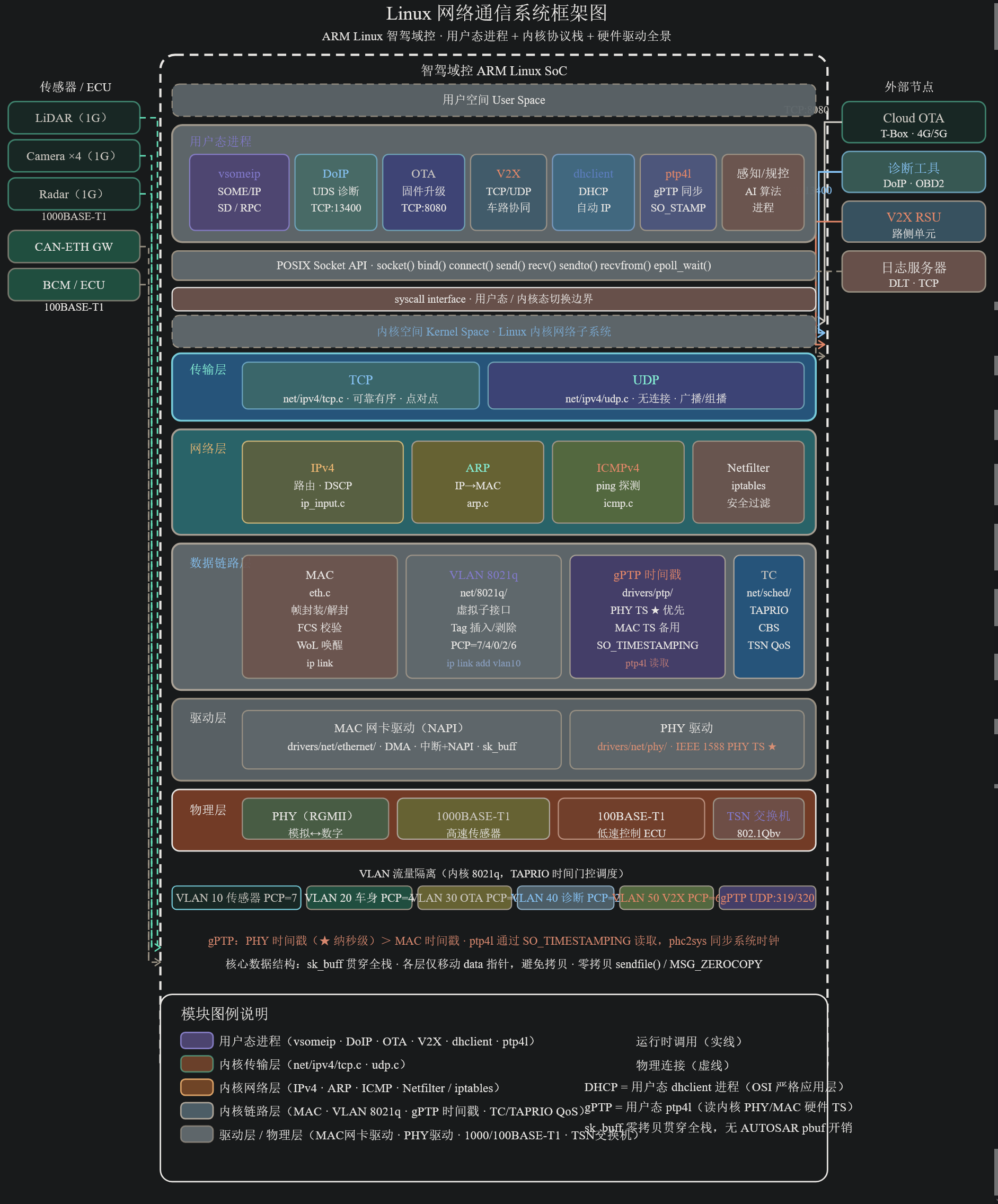
基于Linux的以太网系统框架图:
基于AUTOSAR的以太网协议栈逻辑图:

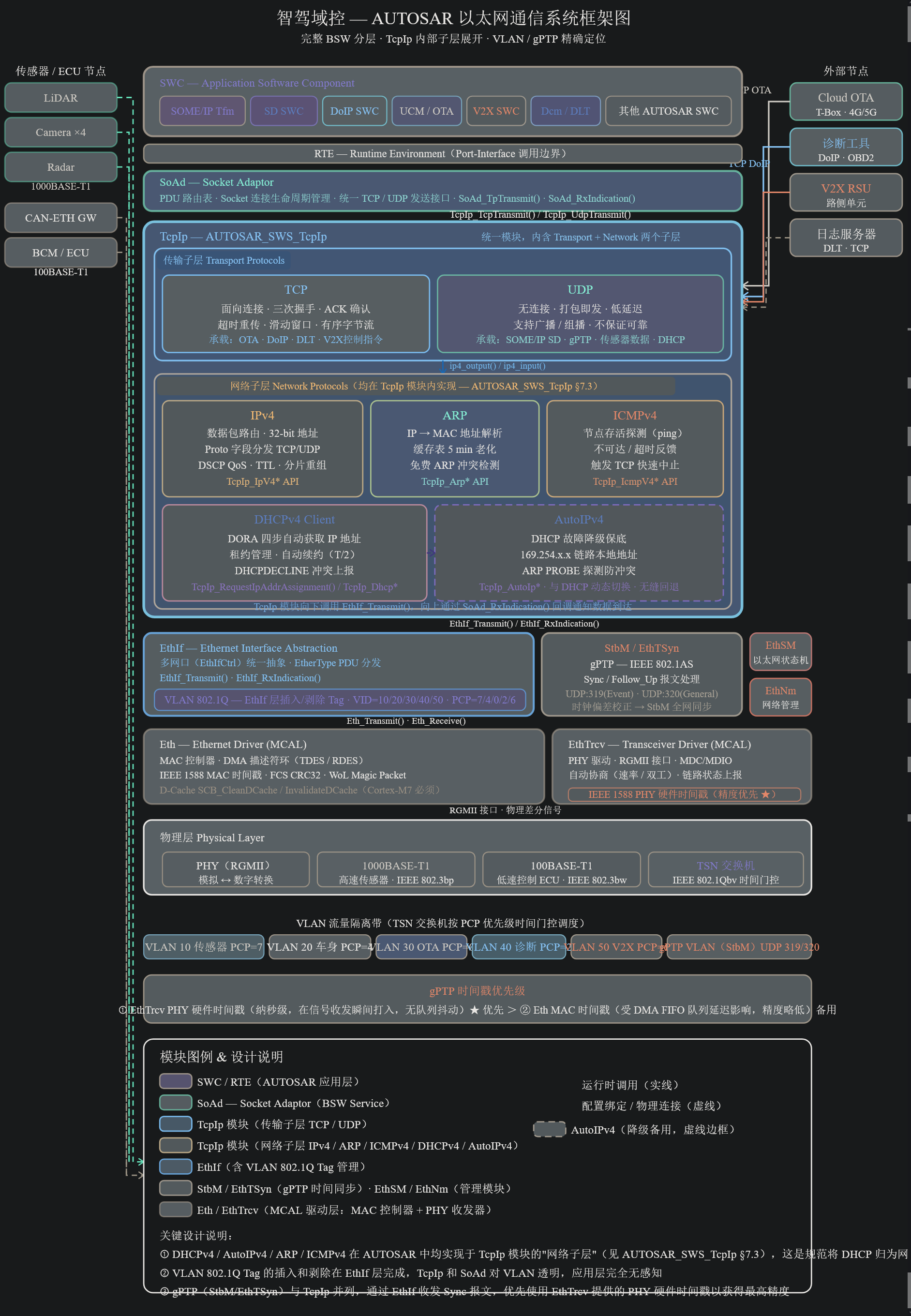
基于AUTOSAR的以太网系统框架图:
AUTOSAR和Linux的架构总对比:

AUTOSAR和Linux的协议分层对比:
