一、结论
k 的本质 = "需要加多少个 2π 才和低频一致"
多频相位展开通过不同频率的包裹相位建立约束关系,利用低频相位提供粗略位置估计,再通过高频相位精细匹配,从而计算出需要补偿的2π周期数k,实现绝对相位恢复。
| 对比 | Gray Code | 多频相位 |
|---|---|---|
| 类型 | 离散 | 连续 |
| 帧数 | 多(10+) | 少(6~12) |
| 精度 | 一般 | 更高 |
| 抗噪 | 强 | 稍弱 |
| 速度 | 慢 | 快 |
二、多频相位的核心思想
理解
不用编码 k,而是:
用不同"频率"的相位去反推 k
假设你有两个周期:
周期1:10 mm(低频)
周期2:2 mm(高频)
测量结果:
低频相位 → 粗位置
高频相位 → 精细位置
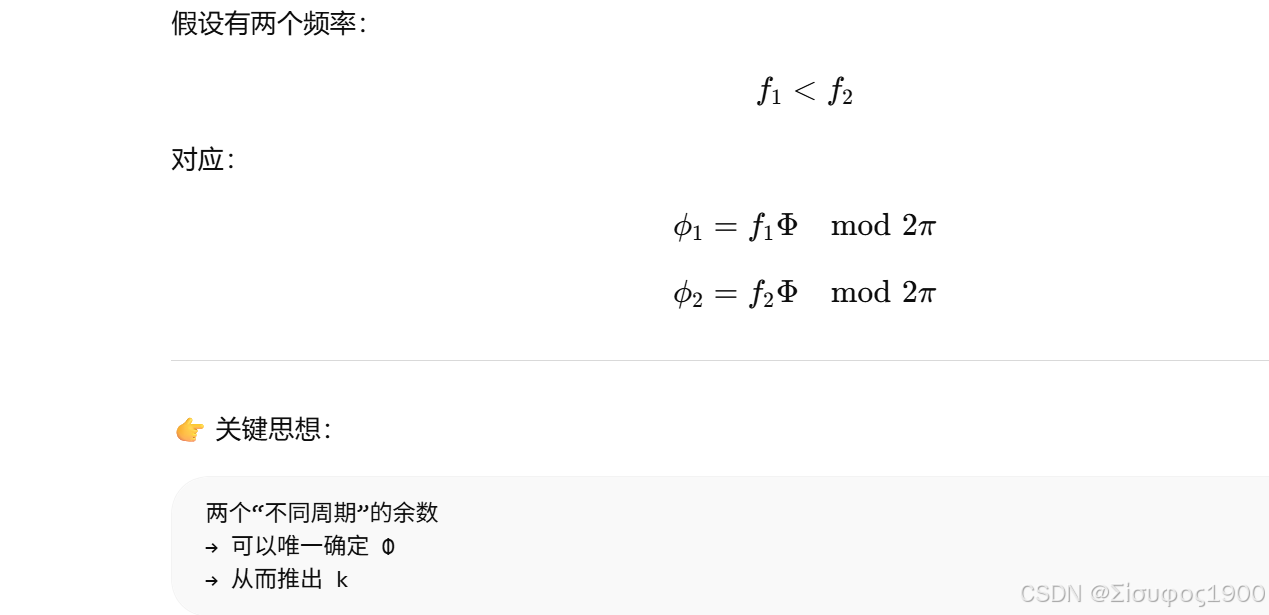
组合:
确定唯一位置数学原理
多个相位

不同频率: f1 < f2
展开思想
双频展开
cpp
假设
f1 = 1(低频)
f2 = 8(高频)
观测:
φ1 = 1.2 rad
φ2 = 2.5 rad
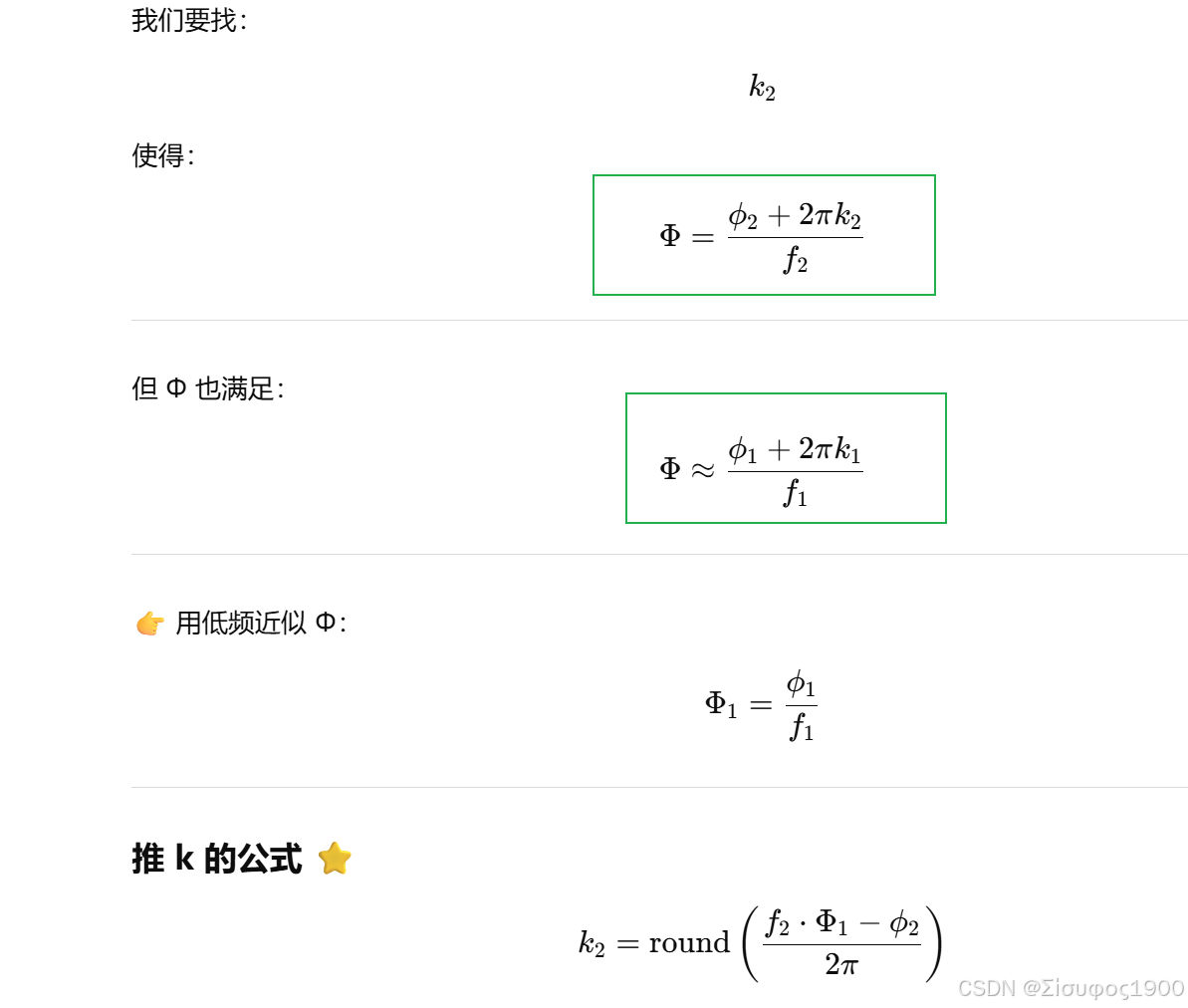
推导真实相位
先算:
Φ ≈ φ2 + 2πk
k 由 φ1 约束:
低频决定"在哪个大区间"
最终:
Φ 唯一确定三频展开(工业级)
cpp
频率:
f1 = 1
f2 = 8
f3 = 64
流程:
低频 → 粗定位
中频 → refine
高频 → 亚像素
类似:
GrayCode + Phase
但:
全是"连续相位"三、工业为什么越来越多用多频?
1、速度快
少帧 → 高速扫描
2、更高精度
纯相位 → 连续模型
3、 无需二值判断
避免阈值误差
4、为什么一定能推出来?
cs
因为:
低频限制范围
Φ ∈ 某个大区间
高频提供细节
φ2 精度高
联立:
只有一个 k 满足4、工程中更稳定写法

四、多频 通过多个 φ 如何推 k
1、问题:
2、数学推导(核心公式)
举例说明:
f1 = 1
f2 = 8
真实相位(未知):
Φ ≈ 15 rad
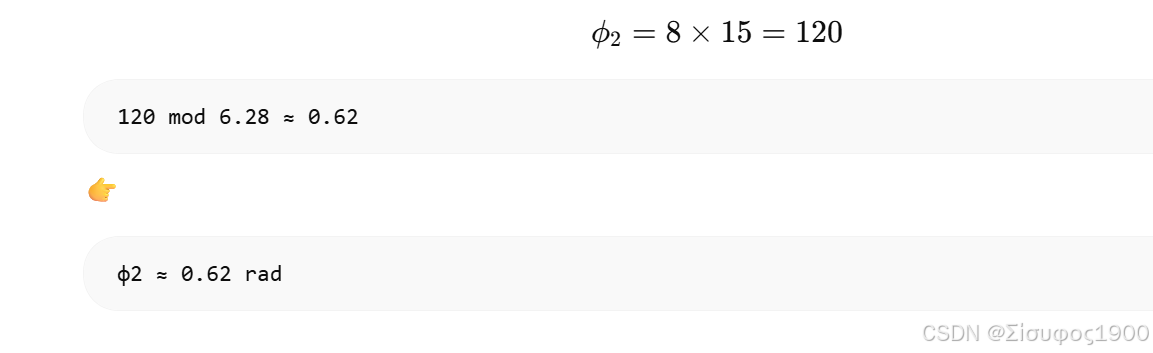
3、计算包裹相位
低频
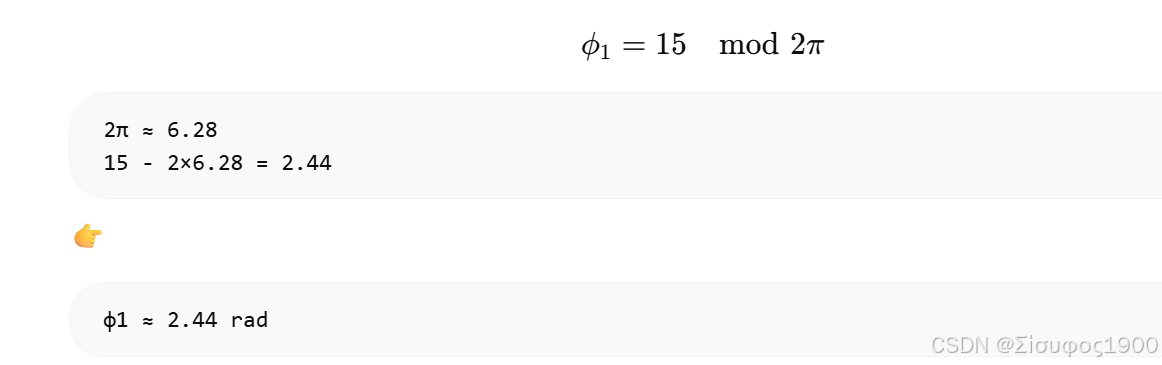
高频
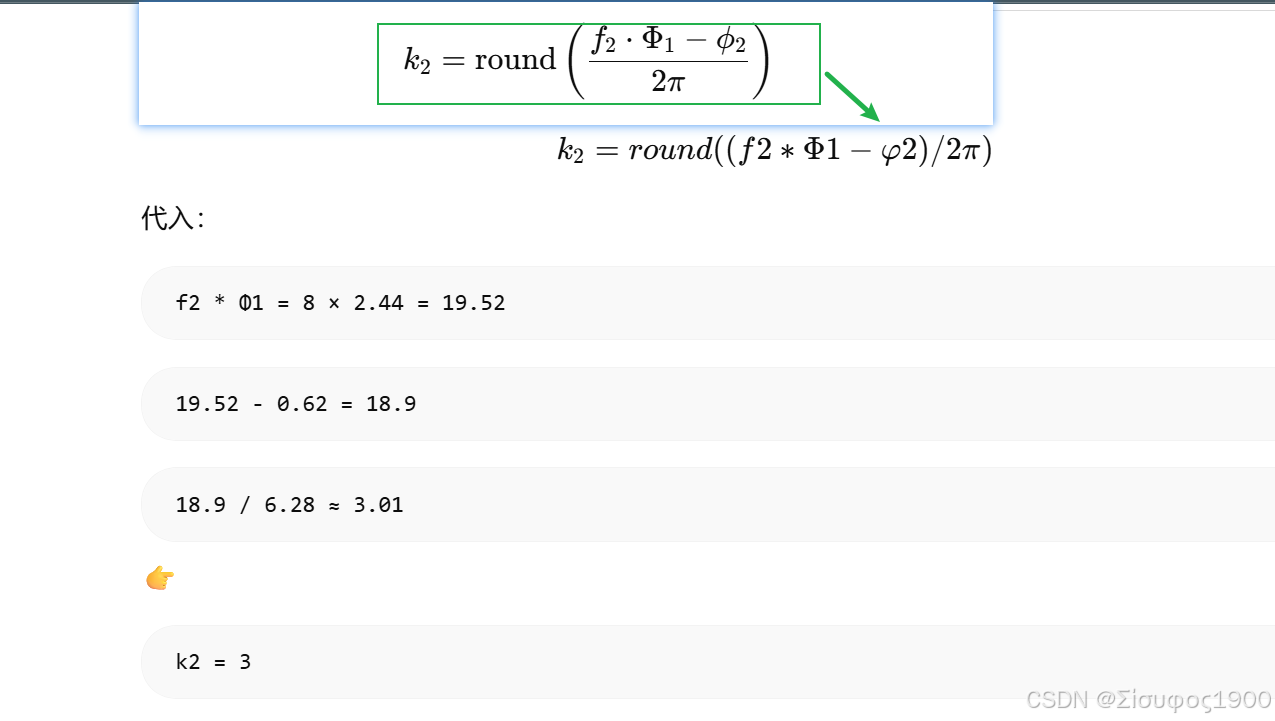
4、用 φ 推 k(核心步骤)
用低频估计 Φ

计算 k₂
5、恢复真实 Φ

6、误差分析
1、 φ噪声
φ误差 → k计算错误
2、 频率选择不合理
f2 太接近 f1 → 不稳定
3、 跳变点
φ 接近 π → 易错