项目核心技术原理
在开始编码前,我们先理解人脸检测的核心逻辑,让学习更有方向。本项目基于 OpenCV 内置的Haar 特征分类器实现人脸检测,这是一种经典且高效的目标检测算法,专门针对人脸、眼睛、车辆等目标优化,具有速度快、轻量化、易部署的特点,非常适合入门学习。
1. Haar 特征分类器核心原理
Haar 特征分类器的核心逻辑是:通过大量正负样本(人脸图片 + 非人脸图片)训练出一个模型文件(.xml 格式),这个模型记住了人脸的核心特征(如五官轮廓、灰度变化规律)。检测时,算法会在图像中滑动窗口,逐区域对比特征,判断该区域是否为人脸,最终定位出人脸的坐标位置。
2. 项目核心流程
本项目分为两大模块,流程高度统一,降低学习成本:
-
静态图片人脸检测:读取本地图片 → 灰度化预处理 → 加载 Haar 分类器 → 检测人脸坐标 → 绘制矩形框标注 → 展示结果;
-
摄像头实时人脸检测:调用摄像头读取帧 → 灰度化预处理 → 加载 Haar 分类器 → 逐帧检测人脸 → 实时绘制标注 → 动态展示结果。
Haar 分类器文件下载
人脸检测的核心是训练好的模型文件,即haarcascade_frontalface_default.xml,这是 OpenCV 官方提供的正面人脸检测分类器,检测准确率高、兼容性强。
静态图片人脸检测
python
'''人脸检测'''
import cv2 # 导入OpenCV库
# 1. 读取本地图片(r表示原始字符串,避免路径转义错误)
image = cv2.imread(r"C:\Users\LEGION\Desktop\hg.webp")
# 2. 将彩色图像转换为灰度图像(人脸检测必须用灰度图,提升准确率和速度)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
'''加载人脸分类器'''
# 填写你的分类器文件路径
faceCascade = cv2.CascadeClassifier(r"E:\haarcascade_frontalface_default.xml")
'''调用分类器实现人脸检测'''
# 核心检测函数,返回所有人脸的坐标信息
faces = faceCascade.detectMultiScale(
gray, # 输入灰度图像
scaleFactor=1.05, # 窗口缩放比例
minNeighbors=9, # 最小相邻检测数
minSize=(8, 8) # 人脸最小尺寸
)
# 输出检测结果
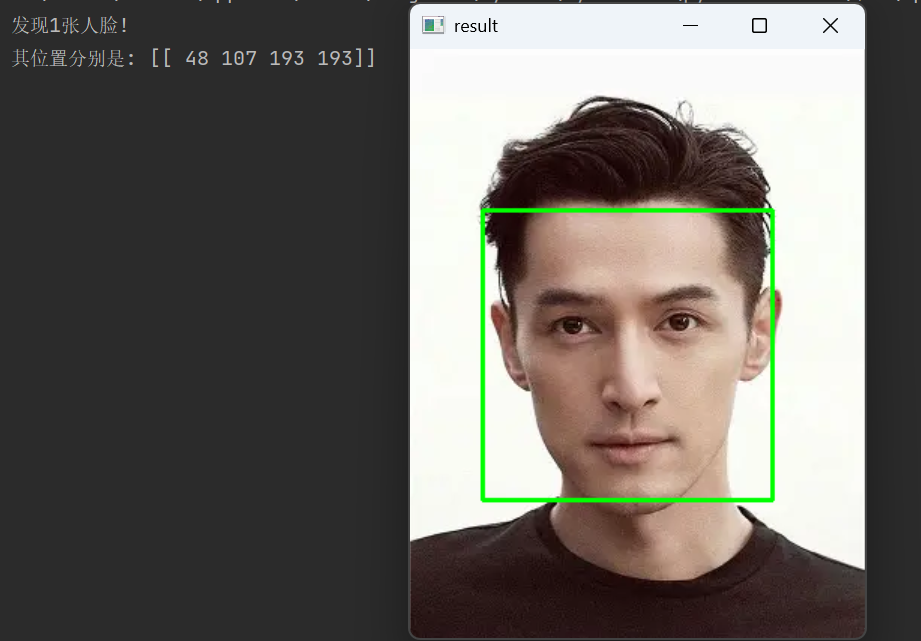
print("发现{0}张人脸!".format(len(faces)))
print("人脸位置坐标分别是:", faces)
'''标注人脸并显示结果'''
# 遍历所有人脸,绘制绿色矩形框
for (x, y, w, h) in faces:
# 参数:图像、左上角坐标、右下角坐标、颜色(BGR)、线条宽度
cv2.rectangle(image, (x, y), (x+w, y+h), (0, 255, 0), 2)
# 显示结果窗口
cv2.imshow("人脸检测结果", image)
# 等待按键输入(0表示无限等待)
cv2.waitKey(0)
# 关闭所有OpenCV窗口
cv2.destroyAllWindows()核心函数解析
python
image = cv2.imread(路径) # 读取图片
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 转灰度图OpenCV 默认读取格式为 BGR,而非常规 RGB
核心检测函数(必学参数)
python
faces = faceCascade.detectMultiScale(gray, scaleFactor=1.05,minNeighbors=9, minSize=(8,8 ))这是人脸检测的核心函数,所有参数直接决定检测效果:
-
gray:待检测的灰度图像,必填参数;
-
scaleFactor:搜索窗口缩放比例,默认 1.1。数值越小,扫描越精细,速度越慢;数值越大,速度越快,可能漏检小尺寸人脸;
-
minNeighbors:目标验证次数,默认 3。数值越大,误检越少,准确率越高(本文设置为 9,大幅降低误检);数值越小,容易把背景误判为人脸;
-
minSize:人脸最小尺寸,小于该尺寸的目标会被忽略;
-
返回值 faces :二维数组,格式为
[[x,y,w,h], ...],分别代表人脸左上角 x 坐标、y 坐标、宽度、高度。
运行结果
摄像头人脸检测
python
'''摄像头实时人脸检测'''
import cv2
# 1. 加载人脸分类器(使用原始字符串路径,避免转义BUG)
faceCascade = cv2.CascadeClassifier(r"E:\haarcascade_frontalface_default.xml")
# 2. 调用摄像头
# 0 = 默认笔记本/手机内置摄像头,外接摄像头改为1、2
cap = cv2.VideoCapture(0)
# 3. 循环读取视频帧
while True:
# 读取每一帧画面
ret, frame = cap.read()
# 读取失败则退出
if not ret:
print("无法获取摄像头画面,请检查摄像头是否正常!")
break
# 4. 帧图像转灰度图
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 5. 人脸检测(参数与图片检测保持一致)
faces = faceCascade.detectMultiScale(
gray,
scaleFactor=1.05,
minNeighbors=9,
minSize=(8, 8)
)
# 6. 标注检测到的人脸
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 7. 显示实时画面
cv2.imshow("实时人脸检测(按下 q 键退出)", frame)
# 8. 退出机制:按下q键关闭程序
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 9. 释放资源
cap.release() # 释放摄像头
cv2.destroyAllWindows() # 关闭所有窗口核心功能解析
摄像头调用
python
cap = cv2.VideoCapture(0)-
调用系统摄像头,返回视频流对象;
-
笔记本默认是 0,外接摄像头可尝试 1、2
视频帧循环处理
python
while True:
ret, frame = cap.read()-
无限循环读取摄像头的每一帧图像;
-
ret:布尔值,代表是否成功读取帧; -
frame:当前帧的图像数据
运行结果

参数调优:提升人脸检测准确率
scaleFactor 调优
-
追求准确率:设置为
1.03~1.08(本文 1.05); -
追求速度:设置为
1.1~1.2; -
检测小人脸:调小数值;检测大人脸:调大数值。
minNeighbors 调优
-
减少误检(不把背景当成人脸):调大到
5~10; -
提高召回率(不漏检人脸):调小到
3~5; -
本文设置 9,适合高精度场景。
minSize 调优
-
图片分辨率小:设置
(20,20)以上; -
图片分辨率大:设置
(50,50)以上; -
避免设置过小,防止噪声干扰。