C# 基于OpenCv的视觉工作流-章41-模板匹配
本章目标:
一、匹配原理;
二、模板创建;
三、模板匹配;
本文模板匹配仅取最佳匹配,即单目标匹配,下章介绍多目标匹配。模板匹配多用于目标定位,后续很多章节点,将采用模板匹配进行整体定位,在整体定位基础上再进行局部区域的定位、识别、判断。
一、匹配原理
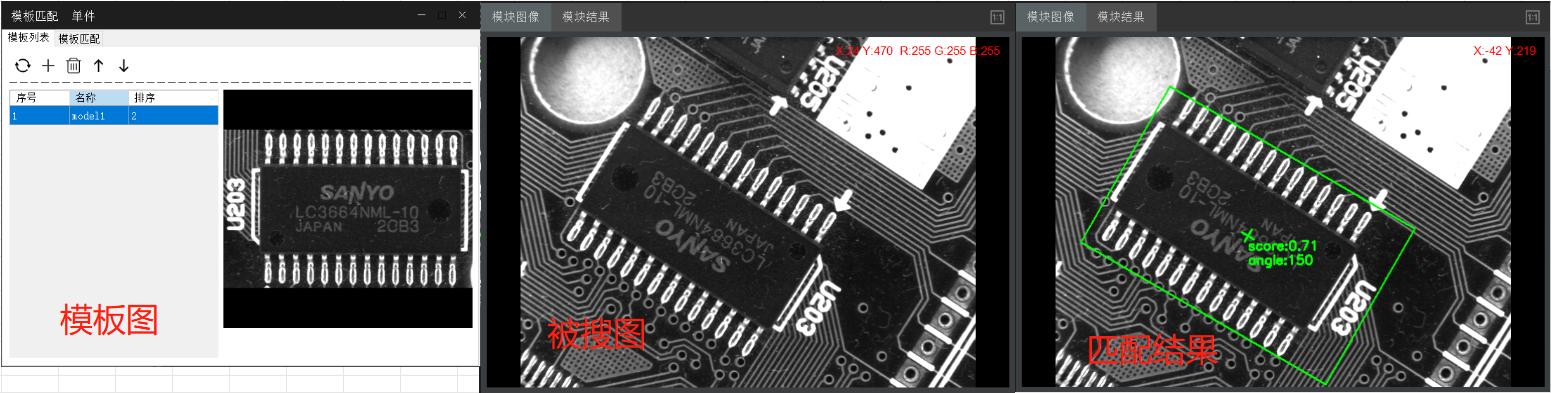
模板匹配是用目标图(小图)逐像素在被搜图(大图)上进行移动扫描,找到最相似的地方,详细原理,见文末链接
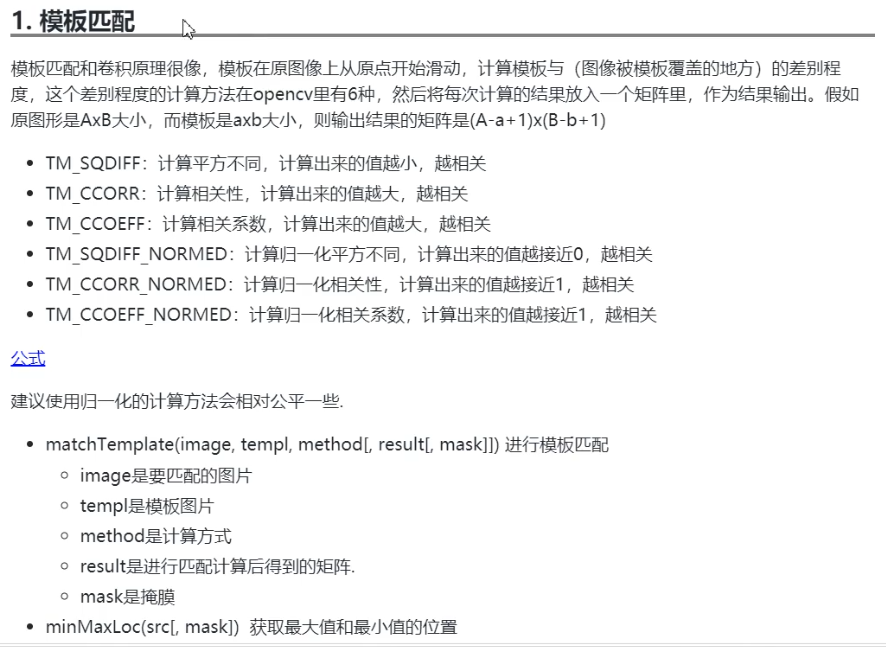
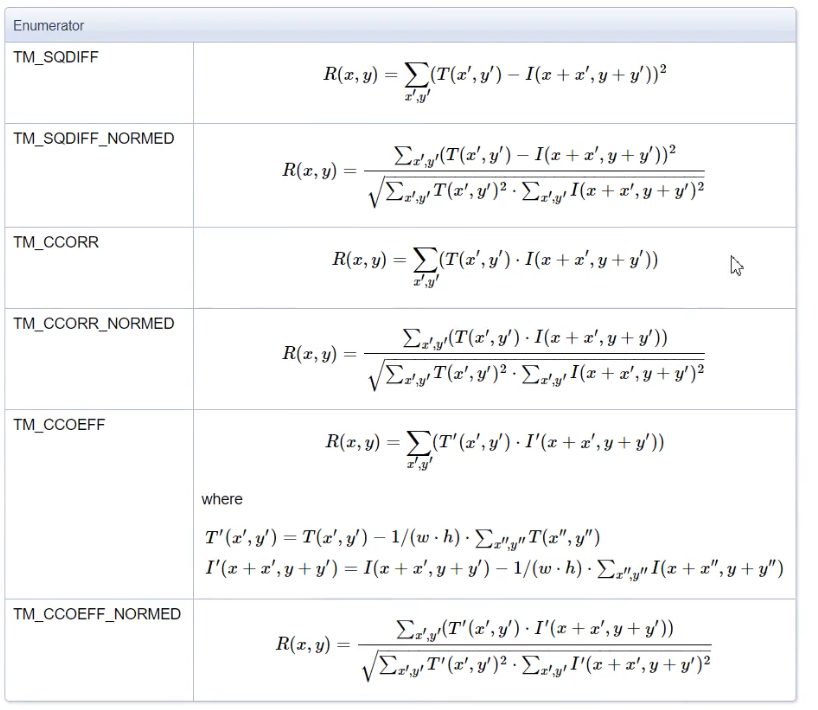
6种算法公式
二、模板创建
模板创建有多种方式,可手动截图、按坐标截图等,为使用方便,本文介绍拖拽ROI方式。ROI为自定义控件,需要较强的C#基础知识,为减少篇幅,不进行展开描述。
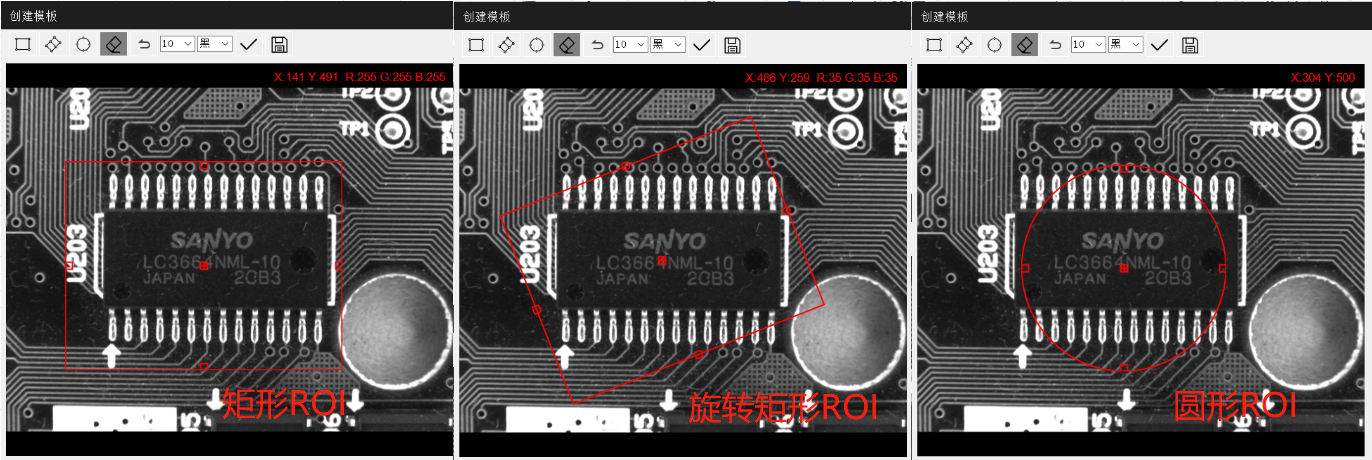
1、生成ROI
根据需要选相应的ROI,ROI框住的范围即为截取的图像区域,即模板。
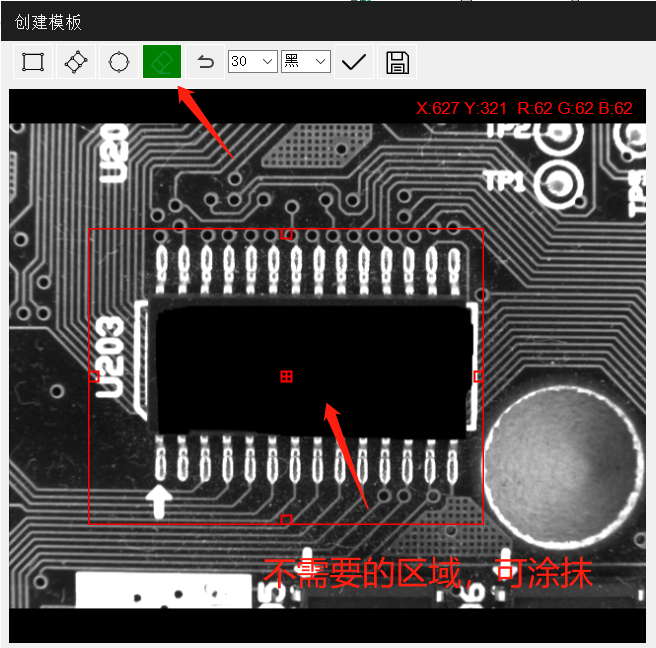
2、ROI涂抹
一般情况下,上一步截得的模板基本满足大部分匹配需求,但如果想让模板内部某部分不进行匹配,提升效率,则可涂抹掉不需要的区域,再保存为模板。
三、模板匹配
模板取得后,普通应用就可以直接进行匹配操作了,但考虑到模板截取时的缩放(尺度)、被匹配对象存在旋转角度以及匹配效率,需要进行相应的处理。
1、尺度处理
用Resize算子(前文已有介绍,不再详述),将模板图按设置尺度值,进行相应尺度缩放;
2、角度处理
用仿射变换(前文已有介绍,不再详述),将模板图按设置角度值,进行相应旋转;
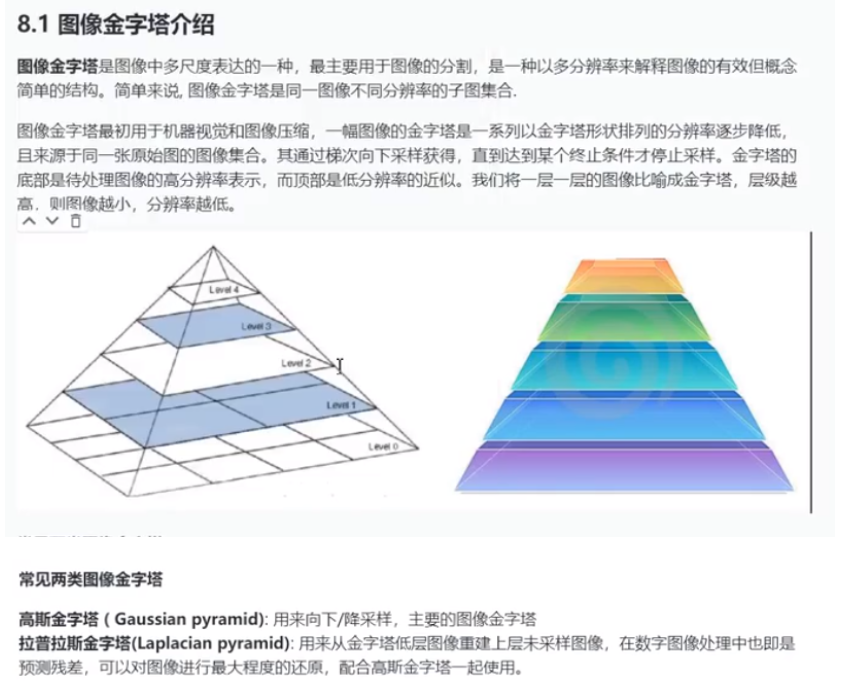
3、金字塔采样
图像金字塔有上采样和下采样,本文采用下采样方式。对模板图像、被搜图像进行下采样,得到多张不同分辨率的图像。分辨率越低,匹配效率越高。
OpenCv 图像下采样可如下使用
Cv2.PyrDown(image, outImage, new OpenCvSharp.Size(width, height));
其中:参数1,为输入图像;
参数2,为输出图像;
参数3,为输出图像尺寸;
4、模板匹配
模板图及被搜图全部准备好后,即可以进行匹配检测
OpenCv 模板匹配可如下使用
Mat resMat = new Mat();
Cv2.MatchTemplate(srcFinalImage, modelFinalImage, resMat, matchMode);
其中:参数1,为被搜图;
参数2,为模板图;
参数3,为输出匹配结果;
参数4,为匹配方法;
5、获取最佳匹配
匹配后,得到的匹配结果resMat中,有各种信息,可对其进行筛选,选取最好的匹配结果
OpenCv 取最大最小值可如下使用
Cv2.MinMaxLoc(resMat, out double min, out double max, out OpenCvSharp.Point minLoc, out OpenCvSharp.Point maxLoc);
其中:参数1,为匹配结果;
参数2,为最小值;
参数3,为最大值;
参数4,为最小值坐标;
参数5,为最大值坐标;
说明:6种匹配算法中,是最大值最接近模板图,还是最小值最接近模板图?不是固定的规则。
SqDiff算法:值越小,越相似;
SqDiffNormed算法:值越大,越相似;
CCorr算法:值越大,越相似;
CCorrNormed算法:值越小,越相似;
CCoeff算法:值越大,越相似;
CCoeffNormed算法:值越大,越相似;
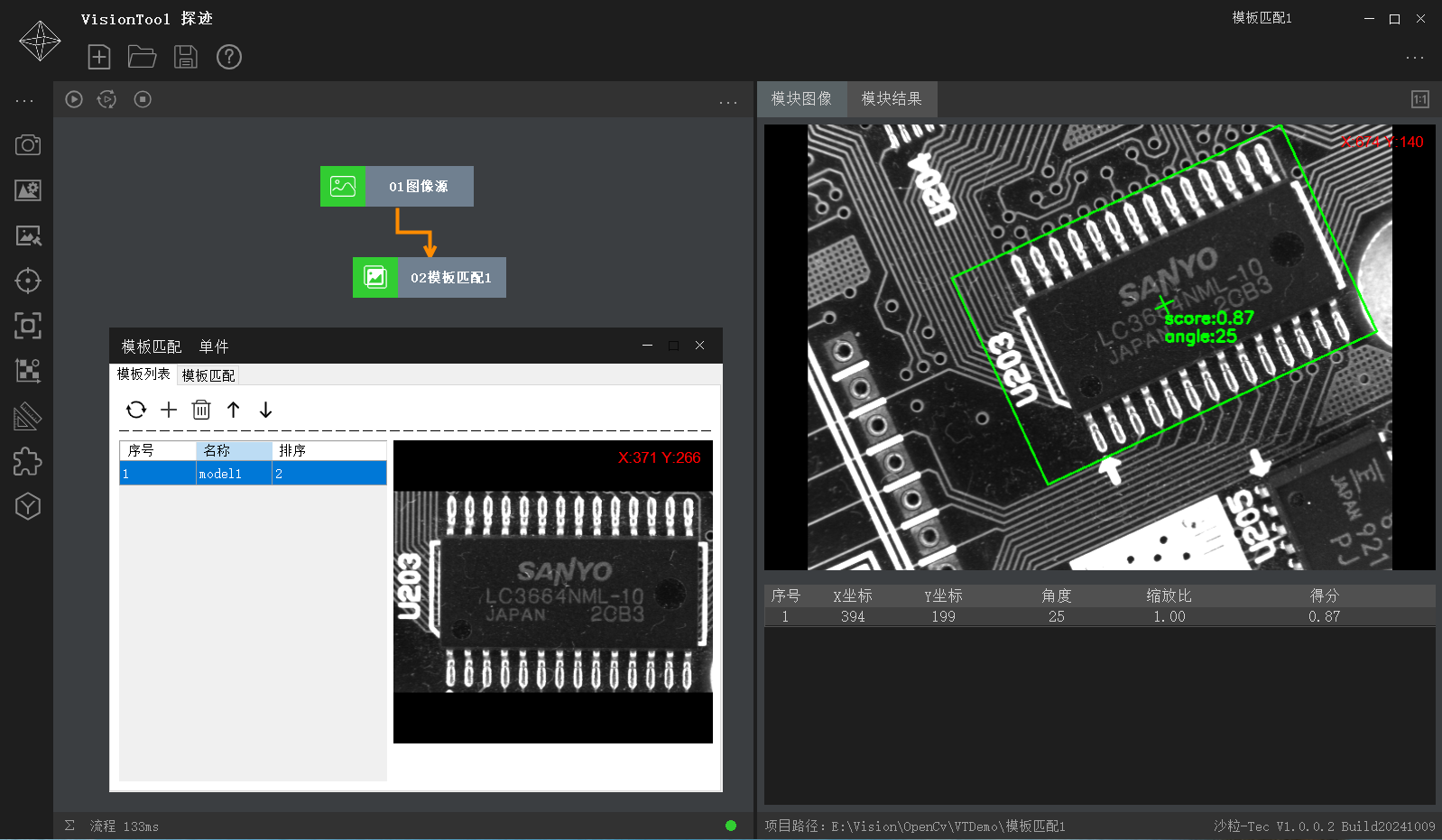
匹配效果,如下图
参考链接
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
版本已更新为V1.0.0.2,更新内容如下:
1.增加点查找;
2.增加交点查找;
3.增加轮廓点距,实现两轮廓各点间距测量;
4.增加点-点间距,实现独立点与独立点的距离测量;
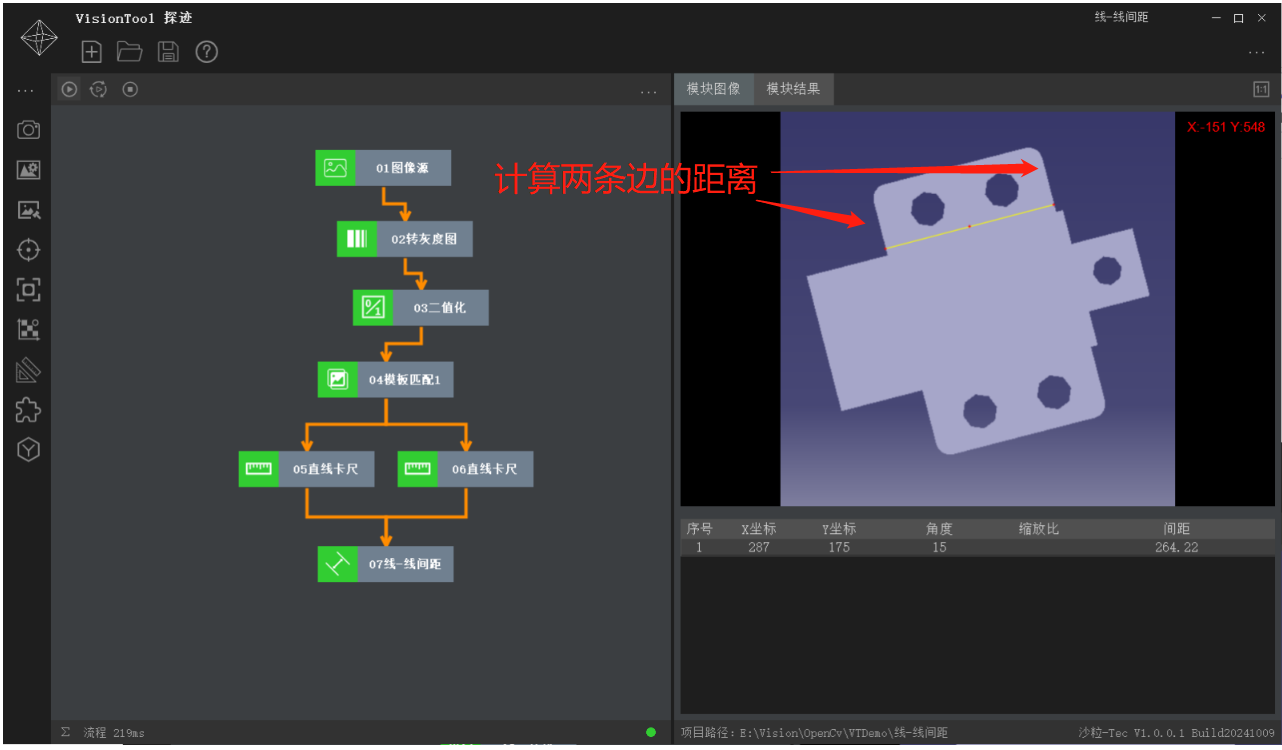
5.增加点-线间距,实现独立点与独立线的距离测量;
6.增加线-线间距,实现独立线与独立线的距离测量;
7.增加线-线角度,实现独立线与独立线的角度测量;
8.增加轮廓段距,实现两轮廓的分段间距测量;
9.缺陷检测模块中,修复ROI显示功能;
"VisionTool Halcon"付费视觉工具
下载地址:https://pan.baidu.com/s/1v832KTonDYS6oNnWG2iZtQ?
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!