本文以车企嵌入式软件开发为背景,系统介绍函数封装与定义的最佳实践。
一、函数设计的核心原则
1.1 单一职责原则 (Single Responsibility Principle)
原则:一个函数只做一件事,并把它做好。
cpp
// ❌ 错误示例:一个函数做太多事
int ProcessEngineData(TEngineData *pData)
{
// 1. 验证数据
if (NULL == pData) return ERR_NULL_PTR;
if (pData->rpm < 0) return ERR_INVALID_RPM;
// 2. 计算油耗
double fuelRate = pData->rpm * 0.001 + pData->throttle * 0.05;
// 3. 更新仪表盘
UpdateDashboard(pData->rpm, pData->speed);
// 4. 记录日志
LogEngineStatus(pData);
// 5. 发送CAN报文
SendCanFrame(CAN_ID_ENGINE_STATUS, pData, sizeof(TEngineData));
return SYS_RET_OK;
}
// ✅ 正确示例:拆分为多个单一职责函数
int ValidateEngineData(const TEngineData *pData)
{
if (NULL == pData)
{
return ERR_NULL_PTR;
}
if (pData->rpm < 0 || pData->rpm > MAX_RPM)
{
return ERR_INVALID_RPM;
}
return SYS_RET_OK;
}
double CalculateFuelConsumption(int rpm, int throttlePercent)
{
return rpm * FUEL_FACTOR_RPM + throttlePercent * FUEL_FACTOR_THROTTLE;
}
void NotifyDashboard(const TEngineData *pData)
{
UpdateDashboard(pData->rpm, pData->speed);
}
int BroadcastEngineStatus(const TEngineData *pData)
{
return SendCanFrame(CAN_ID_ENGINE_STATUS, pData, sizeof(TEngineData));
}1.2 抽象层次一致性
原则:函数内的所有操作应处于同一抽象层次。
cpp
// ❌ 错误示例:抽象层次混乱
int StartVehicle(TVehicleContext *pCtx)
{
// 高层操作
if (!AuthenticateKey(pCtx->keyId))
{
return ERR_AUTH_FAILED;
}
// 低层细节(不应在此出现)
unsigned char canData[8] = {0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
write(pCtx->canFd, canData, 8);
// 高层操作
InitializeEcu(pCtx);
return SYS_RET_OK;
}
// ✅ 正确示例:保持抽象层次一致
int StartVehicle(TVehicleContext *pCtx)
{
int ret = SYS_RET_OK;
ret = AuthenticateKey(pCtx->keyId);
if (ret != SYS_RET_OK)
{
return ret;
}
ret = WakeUpCanNetwork(pCtx);
if (ret != SYS_RET_OK)
{
return ret;
}
ret = InitializeAllEcus(pCtx);
return ret;
}
// 低层细节封装在独立函数中
int WakeUpCanNetwork(TVehicleContext *pCtx)
{
TCanFrame wakeupFrame;
wakeupFrame.canId = CAN_ID_WAKEUP;
wakeupFrame.dlc = 1;
wakeupFrame.data[0] = CMD_NETWORK_WAKEUP;
return SendCanFrame(pCtx->canFd, &wakeupFrame);
}1.3 最小知识原则 (Law of Demeter)
原则:函数只应与直接相关的对象交互,避免"链式调用"。
cpp
// ❌ 错误示例:过度了解内部结构
int GetCurrentSpeed(TVehicle *pVehicle)
{
return pVehicle->pChassis->pWheelSensor->pEncoder->currentSpeed;
}
// ✅ 正确示例:通过接口逐层获取
int GetCurrentSpeed(TVehicle *pVehicle)
{
if (NULL == pVehicle || NULL == pVehicle->pChassis)
{
return 0;
}
return Chassis_GetSpeed(pVehicle->pChassis);
}
// 底盘模块提供接口
int Chassis_GetSpeed(TChassis *pChassis)
{
if (NULL == pChassis || NULL == pChassis->pWheelSensor)
{
return 0;
}
return WheelSensor_GetSpeed(pChassis->pWheelSensor);
}二、函数签名设计
2.1 函数命名规范
规范:动词 + 宾语,帕斯卡命名法
| 操作类型 | 推荐前缀 | 示例 |
|---|---|---|
| 获取值 | Get |
GetEngineRpm(), GetBatteryVoltage() |
| 设置值 | Set |
SetThrottlePosition(), SetBrakeForce() |
| 检查状态 | Is/Has/Can |
IsEngineRunning(), HasDtcFault(), CanShiftGear() |
| 执行动作 | 动词 | StartEngine(), ApplyBrake(), ShiftToGear() |
| 计算值 | Calculate/Compute |
CalculateFuelConsumption(), ComputeSteeringAngle() |
| 初始化 | Init/Initialize |
InitCanController(), InitializeSensorArray() |
| 转换 | Convert/Parse |
ConvertRpmToSpeed(), ParseDtcCode() |
| 验证 | Validate/Check |
ValidateCanFrame(), CheckSensorRange() |
cpp
// ✅ 命名示例
int Engine_GetRpm(TEngineContext *pCtx);
int Engine_SetThrottlePercent(TEngineContext *pCtx, int percent);
bool Engine_IsRunning(TEngineContext *pCtx);
int Engine_Start(TEngineContext *pCtx);
double Engine_CalculateTorque(int rpm, int throttle);2.2 参数设计原则
原则一:参数数量控制在 3-4 个以内
cpp
// ❌ 错误示例:参数过多
int ConfigureEngine(int cylinders, int displacement, int maxRpm,
int idleRpm, double compressionRatio,
int fuelType, int ignitionTiming, int valveTiming)
{
// ...
}
// ✅ 正确示例:使用结构体封装
typedef struct
{
int cylinders;
int displacement;
int maxRpm;
int idleRpm;
double compressionRatio;
int fuelType;
int ignitionTiming;
int valveTiming;
} TEngineConfig;
int ConfigureEngine(TEngineContext *pCtx, const TEngineConfig *pConfig)
{
// ...
}原则二:输入参数在前,输出参数在后
cpp
// ✅ 正确示例
int CalculateGearRatio(int inputRpm, // 输入:输入转速
int outputRpm, // 输入:输出转速
double *pRatio); // 输出:齿轮比
int ReadSensorData(int sensorId, // 输入:传感器ID
TSensorData *pData); // 输出:传感器数据原则三:使用 const 修饰只读参数
cpp
// ✅ 正确示例:明确参数意图
int ProcessCanFrame(const TCanFrame *pFrame, // 只读输入
TProcessResult *pResult); // 可写输出
void LogDtcFault(const TDtcInfo *pInfo); // 只读输入原则四:指针参数需进行有效性检查
cpp
int Engine_SetConfig(TEngineContext *pCtx, const TEngineConfig *pConfig)
{
// 参数有效性检查
if (NULL == pCtx)
{
return ERR_NULL_CONTEXT;
}
if (NULL == pConfig)
{
return ERR_NULL_CONFIG;
}
// 业务逻辑
pCtx->config = *pConfig;
return SYS_RET_OK;
}2.3 返回值设计
模式一:返回错误码 + 输出参数
cpp
// 适用于需要返回复杂数据的场景
int Sensor_ReadTemperature(int sensorId, double *pTemperature)
{
if (NULL == pTemperature)
{
return ERR_NULL_PTR;
}
if (sensorId < 0 || sensorId >= MAX_SENSOR_COUNT)
{
return ERR_INVALID_SENSOR_ID;
}
*pTemperature = ReadAdcValue(sensorId) * TEMP_SCALE_FACTOR;
return SYS_RET_OK;
}
// 调用方式
double temperature;
int ret = Sensor_ReadTemperature(SENSOR_COOLANT, &temperature);
if (ret == SYS_RET_OK)
{
ProcessTemperature(temperature);
}模式二:直接返回结果值
cpp
// 适用于简单计算或获取操作
int Engine_GetRpm(TEngineContext *pCtx)
{
if (NULL == pCtx)
{
return 0; // 或定义特殊错误值
}
return pCtx->currentRpm;
}
bool Engine_IsOverheating(TEngineContext *pCtx)
{
if (NULL == pCtx)
{
return false;
}
return pCtx->coolantTemp > OVERHEAT_THRESHOLD;
}
// 调用方式
int rpm = Engine_GetRpm(pEngine);
if (Engine_IsOverheating(pEngine))
{
ActivateCoolingFan();
}模式三:统一错误码定义
cpp
// 错误码定义(头文件)
#define SYS_RET_OK 0 // 成功
#define ERR_NULL_PTR -1 // 空指针
#define ERR_INVALID_PARAM -2 // 无效参数
#define ERR_TIMEOUT -3 // 超时
#define ERR_BUSY -4 // 设备忙
#define ERR_NOT_READY -5 // 未就绪
#define ERR_CAN_TX_FAILED -100 // CAN发送失败
#define ERR_CAN_RX_TIMEOUT -101 // CAN接收超时
#define ERR_SENSOR_OFFLINE -200 // 传感器离线
#define ERR_SENSOR_FAULT -201 // 传感器故障
// 错误码判断宏
#define IS_SUCCESS(ret) ((ret) == SYS_RET_OK)
#define IS_FAILED(ret) ((ret) != SYS_RET_OK)三、函数封装模式
3.1 模块化封装(C语言风格)
模式:使用模块前缀 + 操作名,通过第一个参数传递上下文
cpp
// ========== Engine.h ==========
#ifndef ENGINE_H_
#define ENGINE_H_
// 前向声明
typedef struct TEngineContext TEngineContext;
// 生命周期管理
int Engine_Create(TEngineContext **ppCtx);
int Engine_Destroy(TEngineContext *pCtx);
int Engine_Initialize(TEngineContext *pCtx, const TEngineConfig *pConfig);
// 状态查询
int Engine_GetRpm(TEngineContext *pCtx);
int Engine_GetState(TEngineContext *pCtx);
bool Engine_IsRunning(TEngineContext *pCtx);
// 控制操作
int Engine_Start(TEngineContext *pCtx);
int Engine_Stop(TEngineContext *pCtx);
int Engine_SetThrottle(TEngineContext *pCtx, int percent);
#endif /* ENGINE_H_ */
// ========== Engine.cpp ==========
#include "Engine.h"
// 私有结构体定义
struct TEngineContext
{
EEngineState state;
int currentRpm;
int targetRpm;
int throttlePercent;
TEngineConfig config;
ICanBus *pCanBus;
};
int Engine_Create(TEngineContext **ppCtx)
{
if (NULL == ppCtx)
{
return ERR_NULL_PTR;
}
TEngineContext *pCtx = (TEngineContext *)malloc(sizeof(TEngineContext));
if (NULL == pCtx)
{
return ERR_NO_MEMORY;
}
memset(pCtx, 0, sizeof(TEngineContext));
pCtx->state = ENGINE_STATE_OFF;
*ppCtx = pCtx;
return SYS_RET_OK;
}
int Engine_Start(TEngineContext *pCtx)
{
if (NULL == pCtx)
{
return ERR_NULL_PTR;
}
if (pCtx->state != ENGINE_STATE_OFF)
{
return ERR_INVALID_STATE;
}
// 发送启动命令
TCanFrame startCmd;
startCmd.canId = CAN_ID_ENGINE_CMD;
startCmd.dlc = 2;
startCmd.data[0] = CMD_ENGINE_START;
startCmd.data[1] = 0x00;
int ret = pCtx->pCanBus->Send(&startCmd);
if (ret != SYS_RET_OK)
{
return ret;
}
pCtx->state = ENGINE_STATE_CRANKING;
return SYS_RET_OK;
}3.2 面向对象封装(C++风格)
cpp
// ========== IEngine.h ==========
class IEngine
{
public:
virtual ~IEngine() {}
virtual int Initialize(const TEngineConfig *pConfig) = 0;
virtual int Start() = 0;
virtual int Stop() = 0;
virtual int GetRpm() const = 0;
virtual bool IsRunning() const = 0;
};
// ========== Engine.h ==========
class Engine : public IEngine
{
public:
Engine(ICanBus *pCanBus);
virtual ~Engine();
// IEngine 接口实现
virtual int Initialize(const TEngineConfig *pConfig);
virtual int Start();
virtual int Stop();
virtual int GetRpm() const;
virtual bool IsRunning() const;
private:
// 禁止拷贝
Engine(const Engine &);
Engine &operator=(const Engine &);
// 私有辅助方法
int SendEngineCommand(unsigned char cmd);
int WaitForState(EEngineState targetState, int timeoutMs);
// 成员变量
ICanBus *m_pCanBus;
EEngineState m_State;
int m_CurrentRpm;
TEngineConfig m_Config;
};
// ========== Engine.cpp ==========
Engine::Engine(ICanBus *pCanBus)
: m_pCanBus(pCanBus)
, m_State(ENGINE_STATE_OFF)
, m_CurrentRpm(0)
{
memset(&m_Config, 0, sizeof(m_Config));
}
int Engine::Start()
{
if (m_State != ENGINE_STATE_OFF)
{
return ERR_INVALID_STATE;
}
int ret = SendEngineCommand(CMD_ENGINE_START);
if (ret != SYS_RET_OK)
{
return ret;
}
m_State = ENGINE_STATE_CRANKING;
// 等待启动完成
ret = WaitForState(ENGINE_STATE_RUNNING, START_TIMEOUT_MS);
return ret;
}
int Engine::SendEngineCommand(unsigned char cmd)
{
TCanFrame frame;
frame.canId = CAN_ID_ENGINE_CMD;
frame.dlc = 2;
frame.data[0] = cmd;
frame.data[1] = 0x00;
return m_pCanBus->Send(&frame);
}3.3 回调函数封装
cpp
// 回调函数类型定义
typedef void (*PFN_OnDtcFault)(int dtcCode, int severity, void *pUserData);
typedef void (*PFN_OnCanFrameReceived)(const TCanFrame *pFrame, void *pUserData);
// 注册回调
typedef struct
{
PFN_OnDtcFault pfnOnDtcFault;
void *pDtcUserData;
PFN_OnCanFrameReceived pfnOnCanReceived;
void *pCanUserData;
} TEngineCallbacks;
int Engine_RegisterCallbacks(TEngineContext *pCtx, const TEngineCallbacks *pCallbacks)
{
if (NULL == pCtx || NULL == pCallbacks)
{
return ERR_NULL_PTR;
}
pCtx->callbacks = *pCallbacks;
return SYS_RET_OK;
}
// 内部触发回调
static void Engine_NotifyDtcFault(TEngineContext *pCtx, int dtcCode, int severity)
{
if (NULL != pCtx->callbacks.pfnOnDtcFault)
{
pCtx->callbacks.pfnOnDtcFault(dtcCode, severity, pCtx->callbacks.pDtcUserData);
}
}
// 使用示例
void MyDtcHandler(int dtcCode, int severity, void *pUserData)
{
TMyApp *pApp = (TMyApp *)pUserData;
Log_Error("DTC detected: 0x%04X, severity: %d", dtcCode, severity);
Dashboard_ShowWarning(pApp->pDashboard, dtcCode);
}
int main()
{
TEngineContext *pEngine = NULL;
Engine_Create(&pEngine);
TEngineCallbacks callbacks;
memset(&callbacks, 0, sizeof(callbacks));
callbacks.pfnOnDtcFault = MyDtcHandler;
callbacks.pDtcUserData = &myApp;
Engine_RegisterCallbacks(pEngine, &callbacks);
// ...
}四、函数实现技巧
4.1 早期返回(Early Return)
原则:先处理异常情况,减少嵌套层次。
cpp
// ❌ 错误示例:嵌套过深
int ProcessBrakeInput(TBrakeContext *pCtx, int pressure)
{
if (NULL != pCtx)
{
if (pressure >= 0 && pressure <= MAX_BRAKE_PRESSURE)
{
if (pCtx->state == BRAKE_STATE_READY)
{
// 业务逻辑...
return SYS_RET_OK;
}
else
{
return ERR_NOT_READY;
}
}
else
{
return ERR_INVALID_PRESSURE;
}
}
else
{
return ERR_NULL_PTR;
}
}
// ✅ 正确示例:早期返回
int ProcessBrakeInput(TBrakeContext *pCtx, int pressure)
{
// 参数校验
if (NULL == pCtx)
{
return ERR_NULL_PTR;
}
if (pressure < 0 || pressure > MAX_BRAKE_PRESSURE)
{
return ERR_INVALID_PRESSURE;
}
// 状态校验
if (pCtx->state != BRAKE_STATE_READY)
{
return ERR_NOT_READY;
}
// 业务逻辑(无嵌套)
pCtx->currentPressure = pressure;
ApplyBrakeForce(pCtx, pressure);
return SYS_RET_OK;
}4.2 资源管理模式
模式一:创建-使用-销毁配对
cpp
int ProcessCanLog(const char *logPath)
{
FILE *pFile = NULL;
TCanFrame *pFrameBuffer = NULL;
int ret = SYS_RET_OK;
// 资源分配
pFile = fopen(logPath, "r");
if (NULL == pFile)
{
ret = ERR_FILE_OPEN;
goto cleanup;
}
pFrameBuffer = (TCanFrame *)malloc(FRAME_BUFFER_SIZE * sizeof(TCanFrame));
if (NULL == pFrameBuffer)
{
ret = ERR_NO_MEMORY;
goto cleanup;
}
// 业务逻辑
ret = ParseCanFrames(pFile, pFrameBuffer, FRAME_BUFFER_SIZE);
cleanup:
// 资源释放(逆序)
if (NULL != pFrameBuffer)
{
free(pFrameBuffer);
}
if (NULL != pFile)
{
fclose(pFile);
}
return ret;
}模式二:RAII (资源获取即初始化)(C++)
cpp
class CanBusLock
{
public:
explicit CanBusLock(ICanBus *pBus) : m_pBus(pBus), m_IsLocked(false)
{
if (NULL != m_pBus)
{
m_pBus->Lock();
m_IsLocked = true;
}
}
~CanBusLock()
{
if (m_IsLocked && NULL != m_pBus)
{
m_pBus->Unlock();
}
}
private:
ICanBus *m_pBus;
bool m_IsLocked;
};
// 使用示例
int SendPriorityFrame(ICanBus *pBus, const TCanFrame *pFrame)
{
CanBusLock lock(pBus); // 构造时加锁
// 业务逻辑
return pBus->SendImmediate(pFrame);
} // 析构时自动解锁,即使发生异常4.3 函数长度控制
原则:一个函数的长度应控制在 30-50 行以内(不含空行和注释)。
cpp
// ❌ 过长的函数应拆分
int ProcessVehicleState(TVehicleContext *pCtx)
{
// 200+ 行的复杂逻辑...
}
// ✅ 拆分为多个小函数
int ProcessVehicleState(TVehicleContext *pCtx)
{
int ret = SYS_RET_OK;
// Step 1: 处理引擎状态
ret = ProcessEngineState(pCtx);
if (ret != SYS_RET_OK)
{
return ret;
}
// Step 2: 处理底盘状态
ret = ProcessChassisState(pCtx);
if (ret != SYS_RET_OK)
{
return ret;
}
// Step 3: 处理电气状态
ret = ProcessElectricalState(pCtx);
if (ret != SYS_RET_OK)
{
return ret;
}
// Step 4: 更新整车状态
ret = UpdateOverallState(pCtx);
return ret;
}4.4 断言与防御性编程
cpp
#include <assert.h>
// 开发阶段使用断言捕获编程错误
int Chassis_SetWheelSpeed(TChassisContext *pCtx, int wheelIndex, int speed)
{
// 断言:捕获开发阶段的错误
assert(NULL != pCtx);
assert(wheelIndex >= 0 && wheelIndex < WHEEL_COUNT);
// 防御性检查:处理运行时的异常情况
if (speed < 0)
{
speed = 0;
}
if (speed > MAX_WHEEL_SPEED)
{
speed = MAX_WHEEL_SPEED;
}
pCtx->wheelSpeeds[wheelIndex] = speed;
return SYS_RET_OK;
}五、函数文档规范
5.1 函数注释模板
cpp
/**
* @brief 启动发动机
*
* @details 执行发动机启动序列,包括:
* 1. 检查启动条件(油压、电池电压等)
* 2. 激活启动电机
* 3. 等待发动机达到怠速转速
*
* @param[in] pCtx 发动机上下文指针,不可为 NULL
* @param[in] mode 启动模式:
* - ENGINE_START_NORMAL: 正常启动
* - ENGINE_START_COLD: 冷启动(延长预热)
*
* @return 执行结果
* @retval SYS_RET_OK 启动成功
* @retval ERR_NULL_PTR 参数为空
* @retval ERR_LOW_BATTERY 电池电压不足
* @retval ERR_START_TIMEOUT 启动超时
*
* @pre 发动机处于 ENGINE_STATE_OFF 状态
* @post 成功后发动机处于 ENGINE_STATE_RUNNING 状态
*
* @note 启动过程约需 2-5 秒,函数同步等待
* @warning 连续启动失败超过 3 次将触发保护锁定
*
* @see Engine_Stop()
* @see Engine_GetState()
*/
int Engine_Start(TEngineContext *pCtx, EEngineStartMode mode);5.2 简化注释(内部函数)
cpp
// 计算制动力分配比例
// 输入:前后轴载荷比 (0.0-1.0)
// 返回:前轴制动力百分比 (0-100)
static int CalculateBrakeDistribution(double frontLoadRatio)
{
// ...
}六、常见错误与最佳实践
6.1 避免的错误模式
| 错误模式 | 问题 | 正确做法 |
|---|---|---|
| 过长函数 | 难以理解和维护 | 拆分为多个小函数 |
| 过多参数 | 调用繁琐,易出错 | 使用结构体封装 |
| 隐藏副作用 | 行为不可预测 | 函数名明确表达副作用 |
| 返回值被忽略 | 错误未处理 | 检查所有返回值 |
| 全局变量依赖 | 难以测试和复用 | 通过参数传递依赖 |
| 魔法数字 | 含义不明 | 使用命名常量 |
6.2 最佳实践清单
- 函数名清晰表达其功能
- 参数数量 ≤ 4 个
- 所有指针参数进行 NULL 检查
- 返回值有明确的错误定义
- 函数长度 ≤ 50 行
- 单一抽象层次
- 无副作用或副作用在函数名中体现
- 资源申请与释放配对
- const 正确性
- 关键函数有文档注释
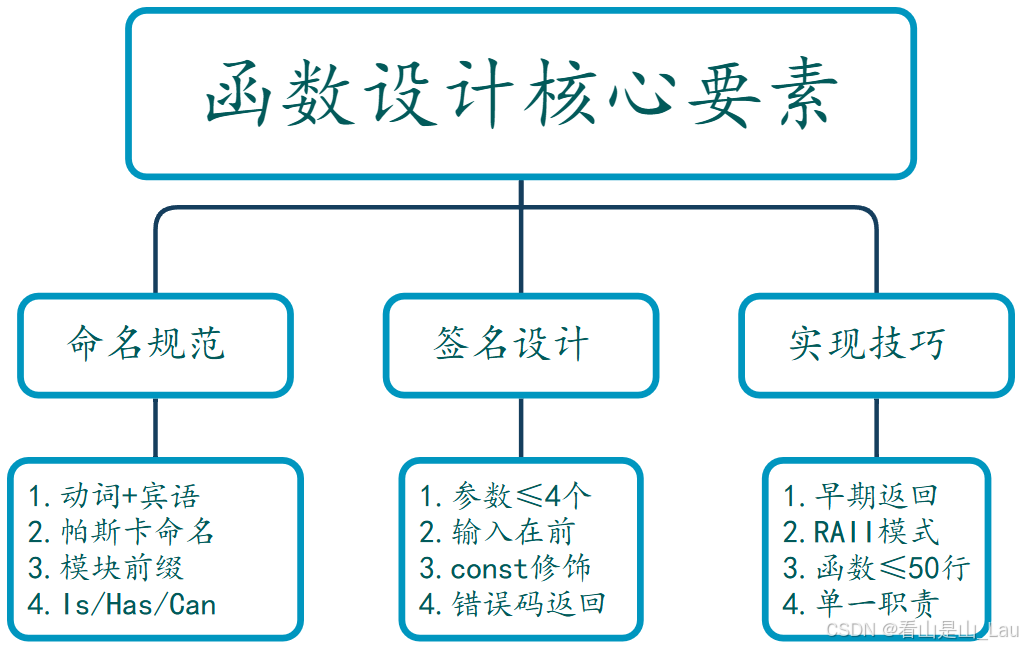
七、总结
函数设计速查表
设计检查流程
1. 这个函数只做一件事吗?
└── 否 → 拆分为多个函数
2. 函数名能准确描述其行为吗?
└── 否 → 重新命名
3. 参数数量是否过多?
└── 是 → 使用结构体封装
4. 是否所有错误情况都处理了?
└── 否 → 添加错误处理
5. 代码是否在同一抽象层次?
└── 否 → 提取或内联函数