技术栈
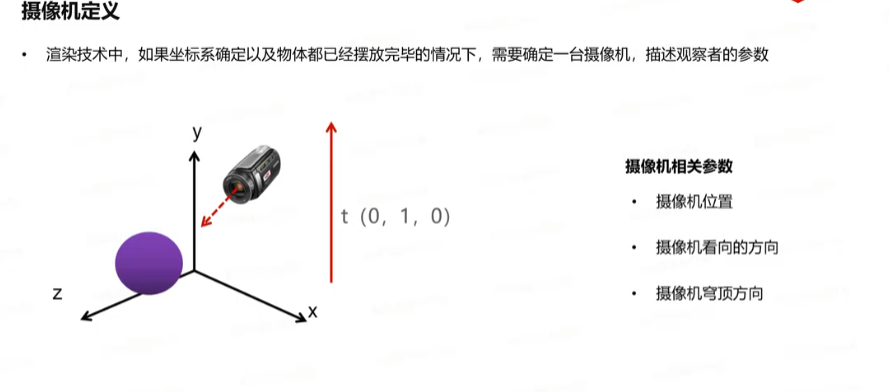
OPENGL之摄像机与视图变换矩阵
泡泡茶壶Wending
2026-03-28 8:20
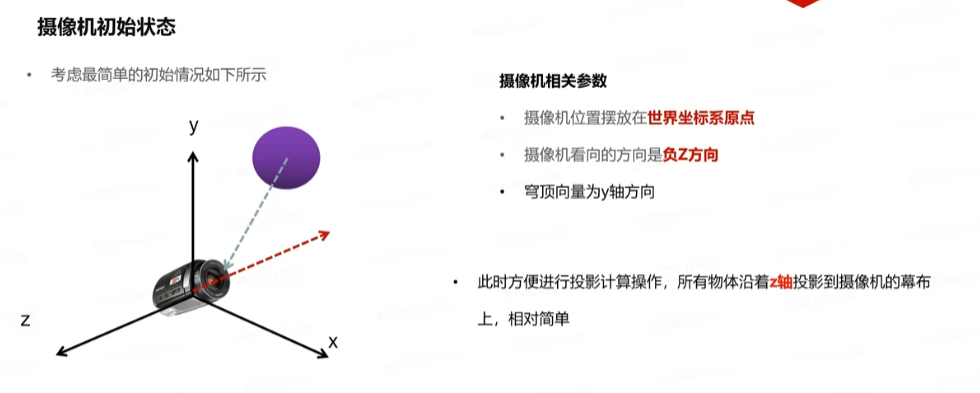
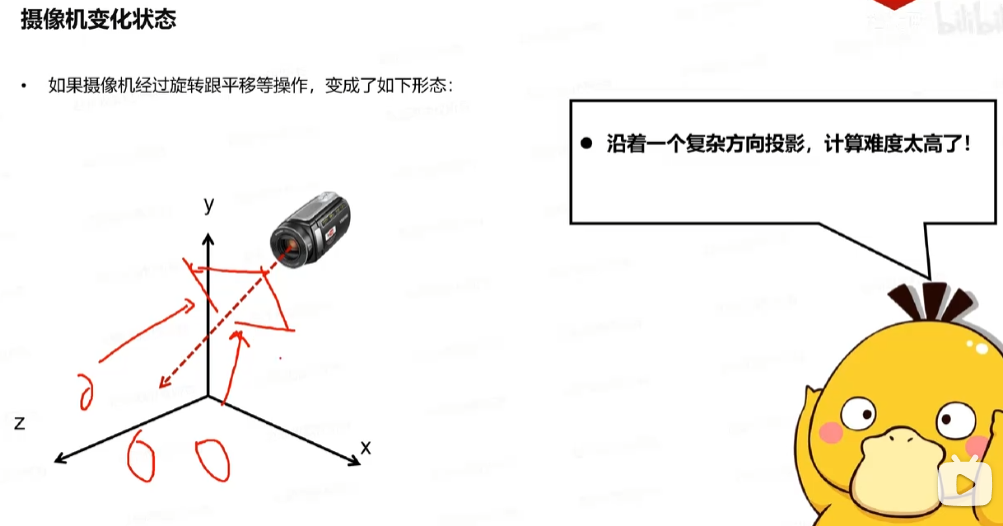
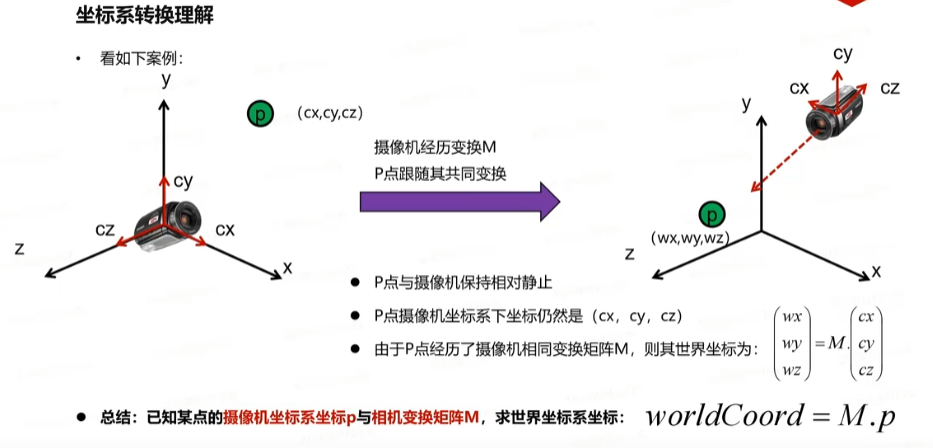
摄像原点和方向不和世界原点重合的情况下,计算物体的投影很困难 ,要怎么解决呢?
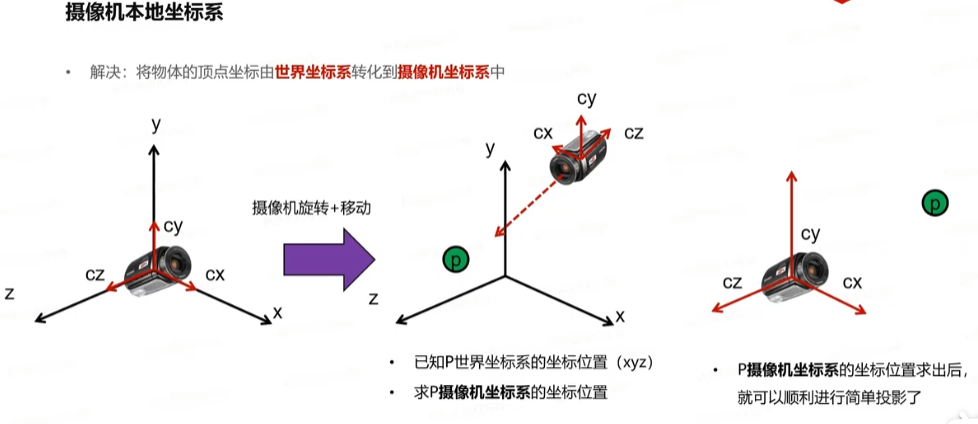
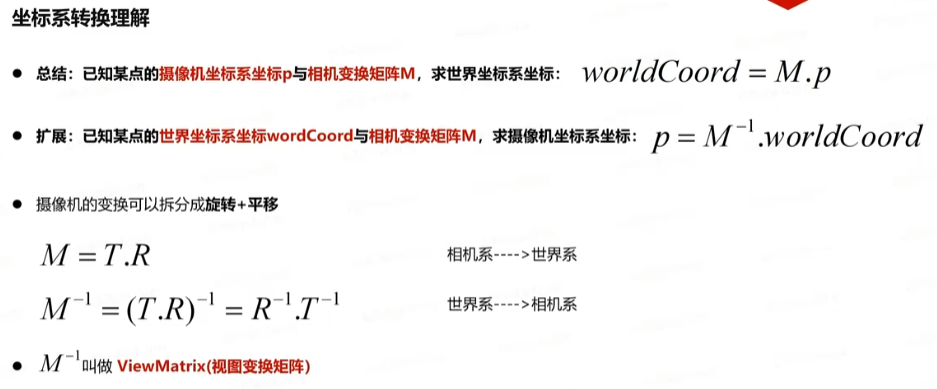
就是需要把所有物体的所有顶点的世界坐标变换到摄像机坐标系中,然后计算投影,这个变换矩阵也叫视图变换矩阵。
线性代数
矩阵
上一篇:
Axure 9.0 原生组件:让柱图实现动态交互(文本标签)
下一篇:
Docker 部署 3 节点 Consul 集群
相关推荐
luoganttcc
9 小时前
指数分布的完整推导
线性代数
·
机器学习
·
概率论
爱刷碗的苏泓舒
15 小时前
平方根信息滤波:矩阵推导及 GNSS 参数估计应用
线性代数
·
算法
·
矩阵
·
gnss
·
参数估计
·
测量平差
·
平方根信息滤波
智灵鸟科技
19 小时前
封闭网络怎么安全地接外部能力:三条通道穷举、威胁封堵矩阵与残余风险
网络
·
安全
·
矩阵
zandy1011
20 小时前
企业级BI平台选型指南:评估框架与核心能力矩阵
大数据
·
人工智能
·
矩阵
AI科技星
1 天前
光速螺旋时空曲率挠率拓扑统一场论——四大力全域闭环求导、精算验证与第一性原理完备证明
线性代数
·
算法
·
决策树
·
机器学习
·
常温超导
·
ai科技星
棒球1号位
1 天前
中国棒球联盟矩阵建设白皮书:解码本土化创新与国际接轨路径·棒球1号位
大数据
·
人工智能
·
矩阵
一个小猴子`
2 天前
Triton实现矩阵乘法
矩阵
·
cuda
·
triton
noipp
2 天前
推荐题目:洛谷 B2099 矩阵交换行
线性代数
·
算法
·
矩阵
ssl_xxy
2 天前
行列式杂题第二弹
线性代数
·
矩阵
中微极客
2 天前
2026年4月LLM排名矩阵:从SWE-Bench到终端性能的实战选型指南
矩阵
热门推荐
01
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
02
GitHub 镜像站点
03
AI科技热点日报 | 2026年07月01日
04
如何新建文件夹? 电脑新建文件夹的4种方法
05
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
06
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
07
2026年AI技术突破与产业落地全景:从GPT-5到多模态智能体的新纪元
08
【AI前线观察】2026年国产开源大模型全面横评:从 DeepSeek V4 到 Kimi K3,谁才是开发者的最优选择?
09
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
10
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?