****论文题目:****A DAE-BiLSTM-Based Fault Diagnosis Method for Principal Drive Shaft Bearings: A Case Study Using Case Western Reserve University Bearing Data(基于DAE-BiLSTM的主传动轴轴承故障诊断方法------以CWRU轴承数据为例)
期刊:processes
****摘要:****自动扶梯的广泛部署大大提高了人们出行的便利性;然而,由于近年来安全事故的日益频繁,引起了人们的极大关注。确保自动扶梯的安全运行,及时发现故障,已成为制造商和维护人员关注的焦点。传统的定期检查是资源密集型的,而且由于自动扶梯的多样性和数量的增加,越来越被认为是不够的。本文以自动扶梯主传动轴轴承为例,设计了一种基于物联网的自动扶梯主传动轴轴承数据采集与传输系统。此外,提出了一种深度自编码器(DAE)和双向长短期记忆网络(BiLSTM)相结合的故障分类模型。本研究的实验结果表明,基于DAE-BiLSTM的故障诊断模型提供了准确的故障检测和预警,准确率超过99%,同时显著降低了计算成本和训练时间。
用深度自编码器+双向LSTM诊断扶梯轴承故障:DAE-BiLSTM方法详解
一、背景:扶梯安全不容忽视
随着城市化进程加快与人口老龄化,自动扶梯已成为地铁站、机场、商场等公共场所不可或缺的基础设施。然而,安全事故的频发让人们开始重新审视扶梯的日常维护方式。以上海地铁为例,约 4000 台扶梯每日运送超过 3000 万人次 ,而其中 60% 的乘客受伤事故发生在扶梯上,且这一比例还在持续上升。
扶梯的主驱动轴承担着传递动力、承受巨大扭矩与扭转力的关键角色。位于驱动轴两端的轴承在长期高负荷运转下极易损坏,一旦失效可能引发严重事故。
传统定期人工检测存在三大痛点:
- 资源消耗大:随着扶梯数量和种类的增加,人工巡检的成本越来越难以为继;
- 难以捕捉早期微弱故障:早期故障症状细微,仅凭肉眼或简单信号分析极难发现;
- 经验依赖强:传统方法高度依赖技术人员的个人经验,缺乏客观标准化流程。
正是在这一背景下,本文提出了一种基于物联网(IoT)的智能故障诊断系统,结合深度自编码器(DAE)与双向长短期记忆网络(BiLSTM),实现扶梯主驱动轴轴承的精准故障诊断与早期预警。
二、整体框架:IoT + 深度学习的闭环系统
本文的系统架构分为两部分:硬件数据采集传输系统 和软件故障诊断模型。
2.1 数据采集与传输系统
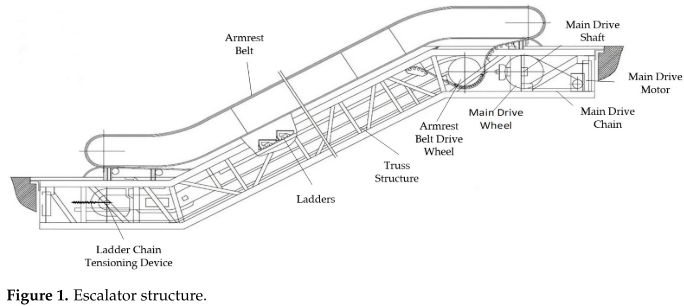

📌 配图:论文 Figure 1(扶梯结构图)+ Figure 2(主驱动轴实物图)
系统采用压电式振动加速度传感器 SE830 安装在主驱动轴的轴承座上,通过磁铁吸附方式固定,采集轴承运行状态的高频振动信号。传感器的关键参数包括:
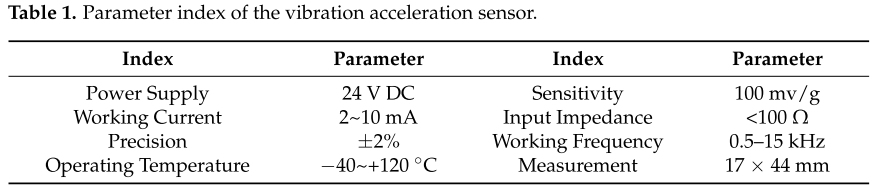
📌 配表:论文 Table 1(传感器参数表)
- 工作频率范围:0.5 Hz ~ 15 kHz(覆盖轴承损伤引起的高频振动)
- 灵敏度:100 mV/g
- 工作温度:-40 ~ +120 °C
采集到的原始振动信号经过两步预处理:
- 趋势项去除:采用最小二乘法消除信号随时间漂移的基线偏差;
- 数字滤波:选用 Butterworth 滤波器,兼顾幅频和相频特性。
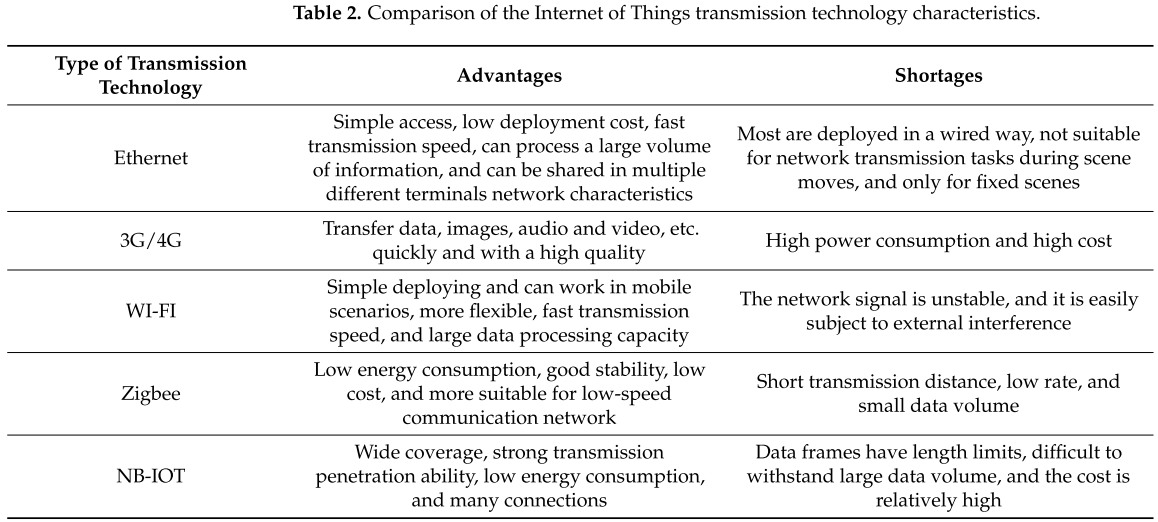
在传输方案上,论文对比了以太网、3G/4G、Wi-Fi、Zigbee、NB-IoT 五种通信技术:
📌 配表:论文 Table 2(IoT 传输技术对比表)
综合扶梯数据量大、环境干扰强(乘客手机等无线信号)的特点,最终选择以太网作为传输方案,数据帧格式由起始码、设备码、数据域、校验码、结束码五部分组成,并采用块校验字符(BCC)确保数据完整性。

📌 配表:论文 Table 3(数据帧格式表)
三、核心算法:DAE-BiLSTM 模型
本文的算法创新集中在两个模块的串联设计:先由 DAE 完成特征提取与降维,再由 BiLSTM 完成时序分类。
3.1 深度自编码器(DAE):降维与降噪
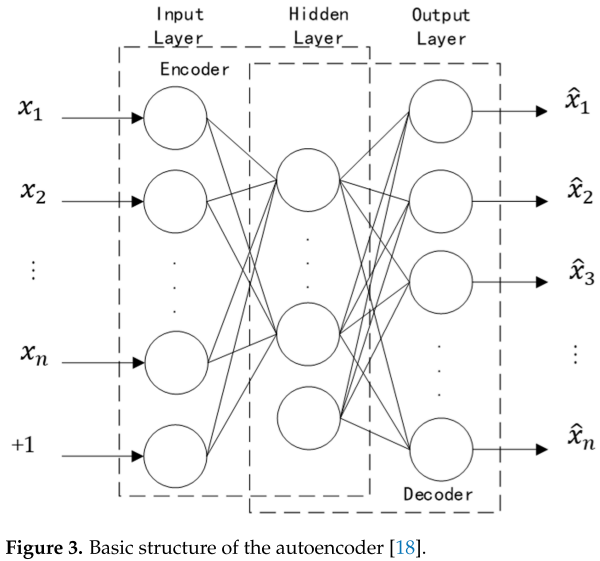
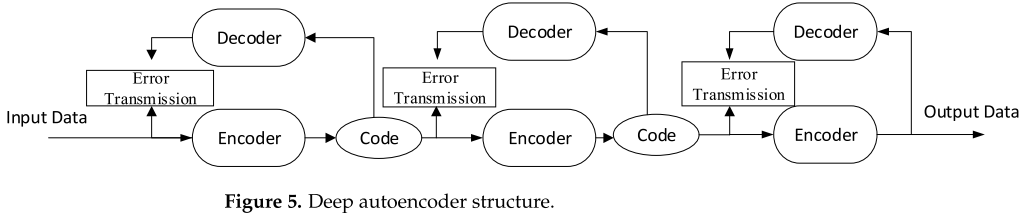
📌 配图:论文 Figure 3(基础自编码器结构图)+ Figure 5(深度自编码器结构图)+ Figure 6(深度自编码器模型图)
自编码器是一种无监督学习模型,通过编码(Encoder)和解码(Decoder)两个过程,学习输入数据的低维潜在表示。
编码过程(论文公式 1):
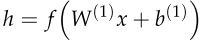
其中 f 为激活函数,W^(1)为编码器权重矩阵,b^(1) 为偏置项。
解码过程(论文公式 2):

激活函数采用 Sigmoid(公式 3),将输出值域限制在 0,1,与归一化后的输入数据域一致。
训练目标是最小化重建误差(论文公式 4):

式中第一项为重建误差,第二项为防止过拟合的正则化项。参数更新遵循梯度下降规则(公式 5、6)。
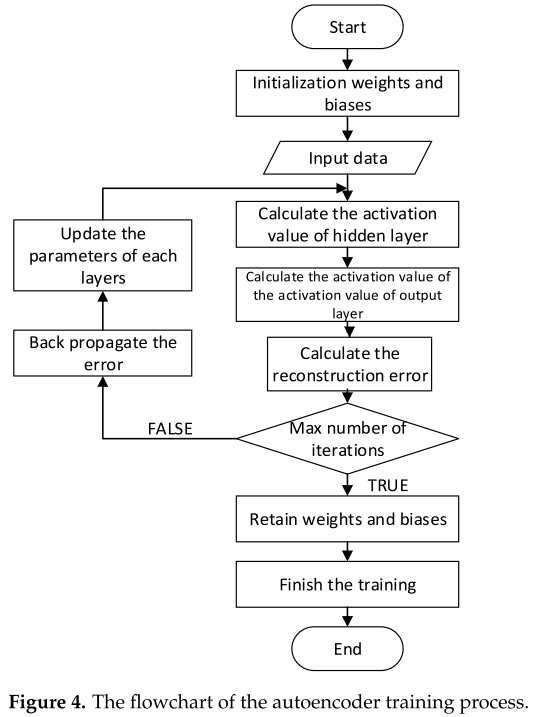
📌 配图:论文 Figure 4(自编码器训练流程图)
为什么用"深度"自编码器(DAE)?
普通单层自编码器的特征提取能力有限。深度自编码器通过堆叠多个编码器-解码器对,利用逐层贪心训练策略,使每一层专注于学习一个层次的表示,有效避免梯度消失问题。本文采用的 DAE 结构为:{1024 - 800 - 400 - 800 - 1024}
即将 1024 维的振动信号压缩至 400 维 的紧凑特征表示,维度压缩率达到 60.9%。
DAE 模型关键参数如下:
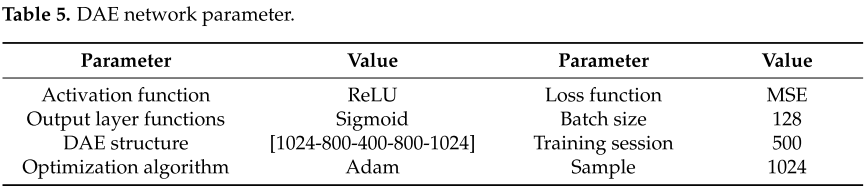
📌 配表:论文 Table 5(DAE 网络参数表)
- 激活函数:编码器层 ReLU (减少反向传播计算量、降低过拟合风险),解码器输出层 Sigmoid
- 损失函数:MSE(均方误差,适合评估输入与重建输出之间的偏差)
- 优化器:Adam(相比 SGD,训练更稳定,能自适应调整学习率)
- Batch 大小:128 ;训练轮数:500 ;样本长度:1024
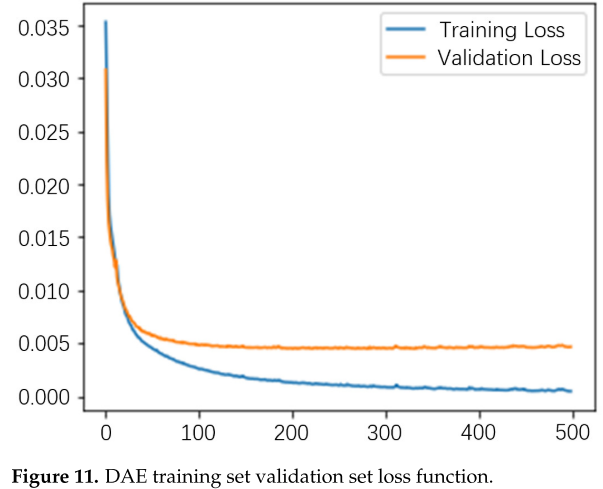
📌 配图:论文 Figure 11(DAE 训练集与验证集损失曲线)
如图所示,经过约 300 轮训练后,损失函数趋于稳定,说明模型已收敛。
3.2 双向长短期记忆网络(BiLSTM):时序特征分类
LSTM:解决 RNN 的梯度问题
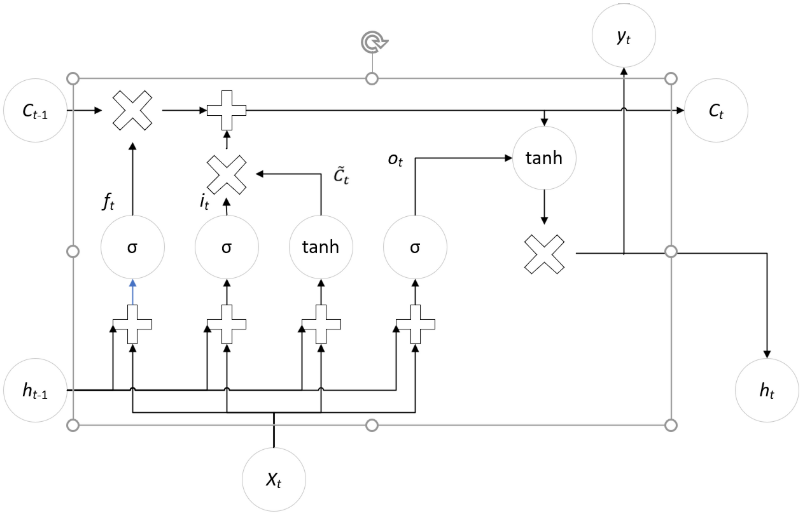
📌 配图:论文 Figure 7(LSTM 网络结构图)
传统 RNN 在处理长时间序列时,面临梯度消失 (无法更新早期层)和梯度爆炸 (训练数值不稳定)的双重困境。LSTM 通过引入遗忘门 、输入门 、输出门三个门控机制解决了这一问题。每个门的输出限制在 0,1,充当"开关":值接近 1 则信息通过,接近 0 则信息被屏蔽。
为什么要"双向"
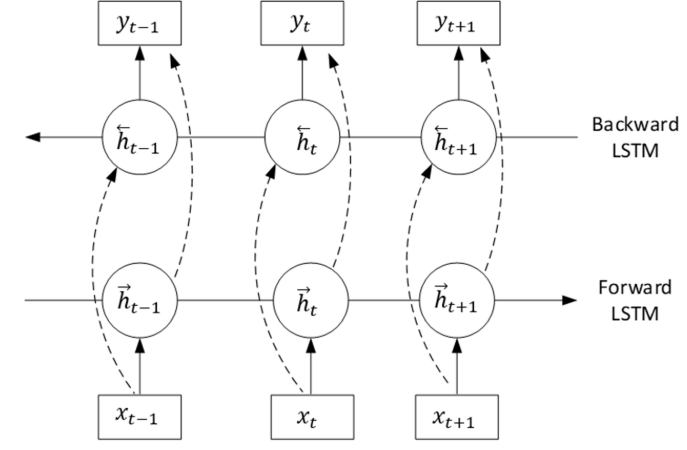
📌 配图:论文 Figure 8(BiLSTM 网络结构图)
单向 LSTM 只能利用当前时刻之前的历史信息,而对于轴承故障诊断,故障发生前后的振动数据都包含有价值的特征信息。BiLSTM 在正向 LSTM 的基础上增加了反向 LSTM,同时捕获序列的过去状态 和**未来状态。**最终输出由前向和后向隐层的输出拼接而成,使模型对时序特征的利用更加充分。
BiLSTM 模型关键参数:
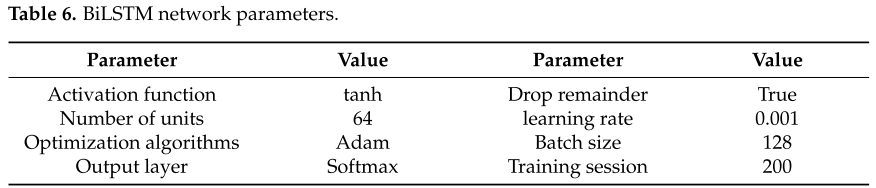
📌 配表:论文 Table 6(BiLSTM 网络参数表)
- 激活函数:tanh ;单元数:64(双向后输出维度为 128)
- 输出层:Softmax(获取各类别的预测概率)
- Dropout 概率:0.2(防止过拟合)
- 优化器:Adam ;学习率:0.001
- Batch 大小:128 ;训练轮数:200
3.3 完整诊断流程
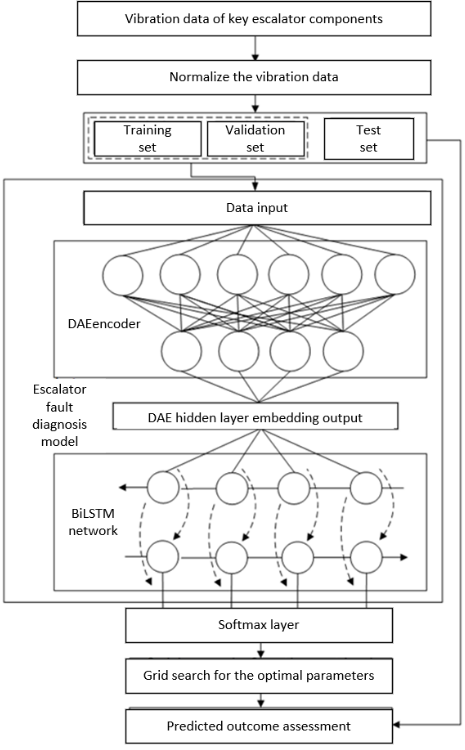
📌 配图:论文 Figure 9(主驱动轴故障诊断框架图)
完整的 DAE-BiLSTM 诊断流程分为两个阶段:
阶段一:DAE 特征提取
- 采集振动信号 → 滑动窗口分割(窗口大小 1024,步长 28)→ Min-Max 归一化至 \[0,1\]
- 按 7:2:1 划分训练集/验证集/测试集
- 训练 DAE(500 轮),保留编码器,将原始 1024 维信号重构为 400 维特征向量
阶段二:BiLSTM 分类
- 将 400 维 DAE 编码特征输入 BiLSTM 网络
- 前向与后向 LSTM 分别提取时序特征,合并后输出
- 经 Softmax 层输出各类别概率
- 以交叉熵损失为优化目标,网格搜索最优超参数
- 在测试集上评估诊断效果
四、实验设置与数据集
4.1 CWRU 轴承数据集
论文采用凯斯西储大学(CWRU)轴承数据中心提供的加速度数据作为训练集。该数据集包含 4 种故障类别:
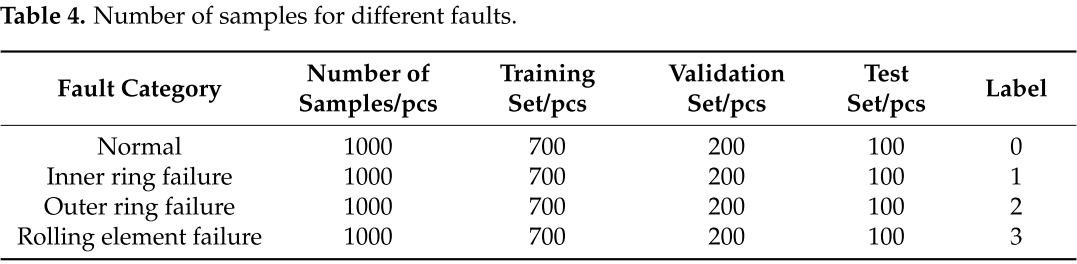
📌 配表:论文 Table 4(各故障类型样本数量表)
| 故障类别 | 样本数 | 训练集 | 验证集 | 测试集 | 标签 |
|---|---|---|---|---|---|
| 正常 (Normal) | 1000 | 700 | 200 | 100 | 0 |
| 内圈故障 (Inner ring) | 1000 | 700 | 200 | 100 | 1 |
| 外圈故障 (Outer ring) | 1000 | 700 | 200 | 100 | 2 |
| 滚动体故障 (Ball) | 1000 | 700 | 200 | 100 | 3 |
每类 1000 个样本,共 4000 个样本,总体按 70% / 20% / 10% 划分。
4.2 数据增强:滑动窗口

📌 配图:论文 Figure 10(滑动窗口数据增强示意图)
为增强模型泛化能力,采用重叠滑动窗口对原始振动信号进行数据增强:
- 窗口大小:1024(与 DAE 输入维度一致)
- 移动步长:28(步长小于窗口长度,形成样本间的重叠)
实验环境:Python 3.8 + PyCharm + TensorFlow + Keras
五、实验结果与分析
5.1 DAE 训练效果
DAE 训练集与验证集的损失曲线均在约 300 轮后收敛并趋于稳定,说明 DAE 能够有效学习振动信号的低维潜在特征,且未出现明显过拟合。
5.2 BiLSTM 故障诊断效果
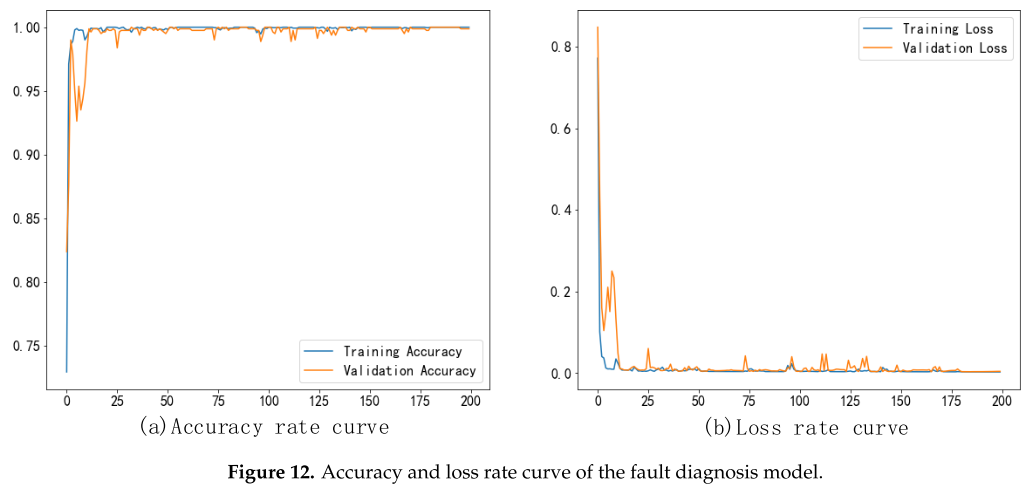
📌 配图:论文 Figure 12(准确率与损失率曲线,含(a)准确率曲线和(b)损失率曲线)
BiLSTM 的训练过程呈现出清晰的收敛规律:
- 前 25 轮:损失率波动剧烈,模型快速学习;
- 约 150 轮 后:准确率趋近 100% ,损失率趋近 0,模型达到稳定状态;
- 最终测试集准确率超过 99%。
5.3 混淆矩阵分析
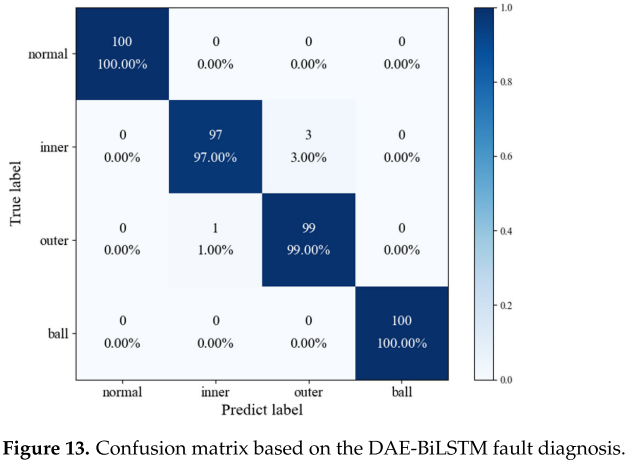
📌 配图:论文 Figure 13(混淆矩阵)
在 400 个测试样本(每类 100 个)上的详细分类结果:
| 真实类别 | 预测正确数 | 准确率 |
|---|---|---|
| Normal(正常) | 100/100 | 100.0% |
| Inner ring(内圈) | 97/100 | 97.0%(3 个误判为 Outer ring) |
| Outer ring(外圈) | 99/100 | 99.0%(1 个误判为 Inner ring) |
| Ball(滚动体) | 100/100 | 100.0% |
混淆矩阵表明模型对正常状态和滚动体故障的识别最为准确,内圈和外圈故障之间存在极少量的相互误判,这与两者振动信号特征相近有关,属于合理范围内的误差。
5.4 与纯 BiLSTM 的对比
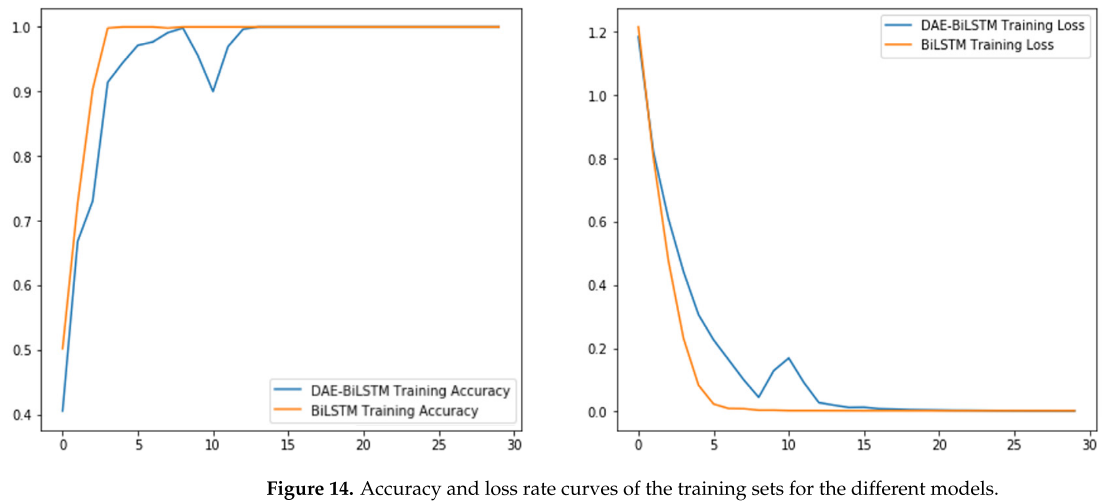

📌 配图:论文 Figure 14(DAE-BiLSTM 与 BiLSTM 准确率和损失率对比曲线)
📌 配表:论文 Table 7(两模型对比表)
两个模型的最终准确率相同,均为 99.5%。然而,DAE-BiLSTM 展现出显著优势:
- 收敛速度更快:在前 12 轮即完成主要收敛,而纯 BiLSTM 收敛则较慢;
- 训练时间大幅缩短:仅需 5 分钟 ,比纯 BiLSTM 的 23 分钟节省了约 78% 的时间;
- 原因在于 DAE 将输入从 1024 维压缩至 400 维,显著降低了 BiLSTM 的计算负担,同时 DAE 的去噪特性使 BiLSTM 能够处理更干净、更聚焦于故障特征的输入。
5.5 与其他方法的横向对比
| 方法 | 准确率 | 主要局限 |
|---|---|---|
| CNN(多传感器融合,Xia 2018) | 99.41%(双传感器)/ 98.35%(单传感器) | 未显式解决降维与训练效率问题 |
| 自适应 DBN + DTCWPT(Shao 2017) | 94.37% | 预处理复杂,计算代价高 |
| 全局优化 GAN(Zhou 2020) | 94.58% / 96.85% / 93.28%(不同故障位置) | 依赖对抗训练和样本生成,训练不稳定 |
| DAE-BiLSTM(本文) | 99.5% | --- |
本文方法在准确率方面处于领先水平,同时兼顾了训练效率,综合性能最优。
六、创新点总结
6.1 系统层面
提出了一套完整的IoT 扶梯主驱动轴轴承状态监测系统,涵盖从传感器数据采集、以太网传输到云端数据库存储的全链路,填补了扶梯在线监测领域的工程空白。
6.2 算法层面
DAE-BiLSTM 联合架构的核心创新在于分工明确的两级设计:
- DAE 负责"压缩与去噪":无监督地从高维振动信号中提取低维故障特征,同时过滤噪声干扰;
- BiLSTM 负责"时序分类":双向结构同时利用故障发生前后的时序信息,提升分类精度。
两者的结合实现了在保持高准确率(99.5%)的前提下,将训练时间压缩至原来的 1/4.6,为实时工业部署提供了可行性。
七、局限性与未来方向
论文的作者也坦诚地指出了当前研究的局限:
- 数据来源单一:模型主要基于轴承故障数据进行验证,对其他类型故障(如链条断裂、梯级系统故障)的泛化能力有待评估;
- 传感器数据质量依赖:实际部署中传感器的安装位置和数据质量会影响模型精度;
- 覆盖范围有限:未来需要扩展至张紧轴、主驱动链条等其他传动部件,实现扶梯系统级的全面健康监测。
八、结语
本文展示了一条清晰的"IoT + 深度学习"轴承故障诊断路径:用 DAE 解决特征维度爆炸和噪声问题,用 BiLSTM 挖掘时序前后依赖,最终以99.5% 的准确率和 5 分钟的训练时间,在 CWRU 基准数据集上验证了方法的有效性。
对于希望在工业设备健康监测领域落地深度学习技术的研究者和工程师而言,DAE-BiLSTM 框架提供了一个兼顾精度 与效率的可复用范式,值得在更广泛的旋转机械故障诊断场景中进一步探索。