1.硬件软件要求
正点原子i.MX6ULL开发板+800*480显示屏,OV5640摄像头,内核版本(NXP:linux-imx-rel_imx_4.1.15_2.1.0_ga),qt版本(qt5.12.9)
2.驱动层
2.1获取OV5640驱动
推荐使用正点原子官方内核中的OV5640驱动文件,因为NXP内核中的OV5640驱动文件缺少部分适配i.MX6ULL开发板的格式配置,需要进行一些修改。在官方资料中找到正点原子Linux出厂源码,将内核文件进行下载解压,在路径drivers/media/platform/mxc/subdev找到mx6s_capture.c,ov5640.c和ov5640af.h,新建new_ov5640目录将三个文件拷贝到该目录下并新建ov5640.h和Makefile
Makefile
bash
ARCH = arm
CROSS_COMPILE = arm-linux-gnueabihf-
//自己内核路径
KERNELDIR := /home/linux/imx6ull_dev/linux_kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga
CURRENT_PATH := $(shell pwd)
obj-m := ov5640.o mx6s_capture.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) \
ARCH=$(ARCH) \
CROSS_COMPILE=$(CROSS_COMPILE) \
M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) \
ARCH=$(ARCH) \
CROSS_COMPILE=$(CROSS_COMPILE) \
M=$(CURRENT_PATH) clean在当前目录下进行make
bash
linux@linux-virtual-machine:~/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo$ make
make -C /home/linux/imxcull_dev/linux_kernel_bak/linux-imx-rel_imx_4.1.15_2.1.0_ga \
ARCH=arm \
CROSS_COMPILE=arm-linux-gnueabihf- \
M=/home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo modules
make[1]: 进入目录"/home/linux/imxcull_dev/linux_kernel_bak/linux-imx-rel_imx_4.1.15_2.1.0_ga"
CC [M] /home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo/ov5640.o
CC [M] /home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo/mx6s_capture.o
Building modules, stage 2.
MODPOST 2 modules
CC /home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo/mx6s_capture.mod.o
LD [M] /home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo/mx6s_capture.ko
CC /home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo/ov5640.mod.o
LD [M] /home/linux/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo/ov5640.ko
make[1]: 离开目录"/home/linux/imxcull_dev/linux_kernel_bak/linux-imx-rel_imx_4.1.15_2.1.0_ga"
linux@linux-virtual-machine:~/imxcull_dev/nfs/ubuntu_sys/ubuntu_rootfs/camera_demo$ ls
Makefile Module.symvers mx6s_capture.ko mx6s_capture.mod.o ov5640af.h ov5640.h ov5640.mod.c ov5640.o
modules.order mx6s_capture.c mx6s_capture.mod.c mx6s_capture.o ov5640.c ov5640.ko ov5640.mod.o其中mx6s_capture.ko和ov5640.ko就是可加载的驱动
2.2设备树修改
在内核目录arch/arm/boot/dts路径下找到imx6ull-14x14-evk.dts设备树文件,在i2c和CSI节点下添加ov5640摄像头描述信息
bash
ov5640: ov5640@3c {
compatible = "ovti,ov5640";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_csi1
&csi_pwn_rst>;
clocks = <&clks IMX6UL_CLK_CSI>;
clock-names = "csi_mclk";
pwn-gpios = <&gpio1 4 1>;
rst-gpios = <&gpio1 2 0>;
// pwn-gpios = <&gpio_spi 6 1>;
// rst-gpios = <&gpio_spi 5 0>;
csi_id = <0>;
mclk = <24000000>;
mclk_source = <0>;
status = "okay";
port {
ov5640_ep: endpoint {
remote-endpoint = <&csi1_ep>;
};
};
};在csi节点下添加描述信息
bash
&csi {
status = "okay";
port {
csi1_ep: endpoint {
remote-endpoint = <&ov5640_ep>;
};
};
};并配置ov5640的电源和复位管脚
bash
csi_pwn_rst: csi_pwn_rstgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x10b0
MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0x10b0
>;
};然后找找看有没有和ov5640管脚冲突的管脚,比如我的设备树中的电阻屏设备
bash
//与ov5640管脚冲突
pinctrl_tsc: tscgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO01__GPIO1_IO01 0xb0
MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0xb0
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0xb0
MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0xb0
>;
};直接找到tsc节点将okay改为disabled(因为我们使用的是电容屏,所以不影响)
bash
&tsc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_tsc>;
xnur-gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;
measure-delay-time = <0xffff>;
pre-charge-time = <0xfff>;
//设置"disabled"
status = "disabled";
};修改完后进行保存
2.3内核配置
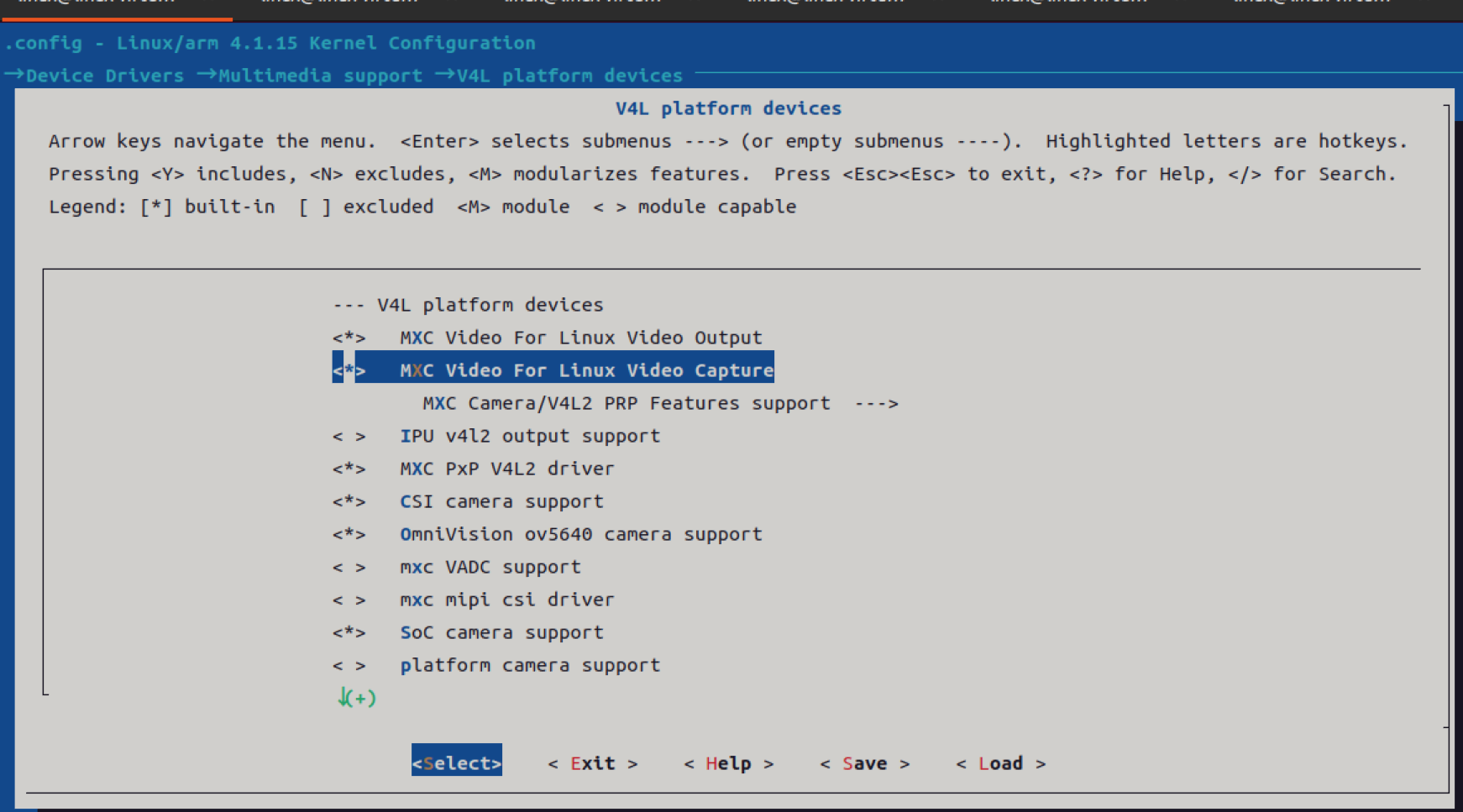
在内核目录下输入命令make ARCH=arm menuconfig进入图形配置界面,找到Device Drivers --->Multimedia support --->V4L platform devices --->MXC Video For Linux Video Capture勾选
再进入MXC Camera/V4L2 PRP Features support --->OmniVision ov5640 camera support勾选
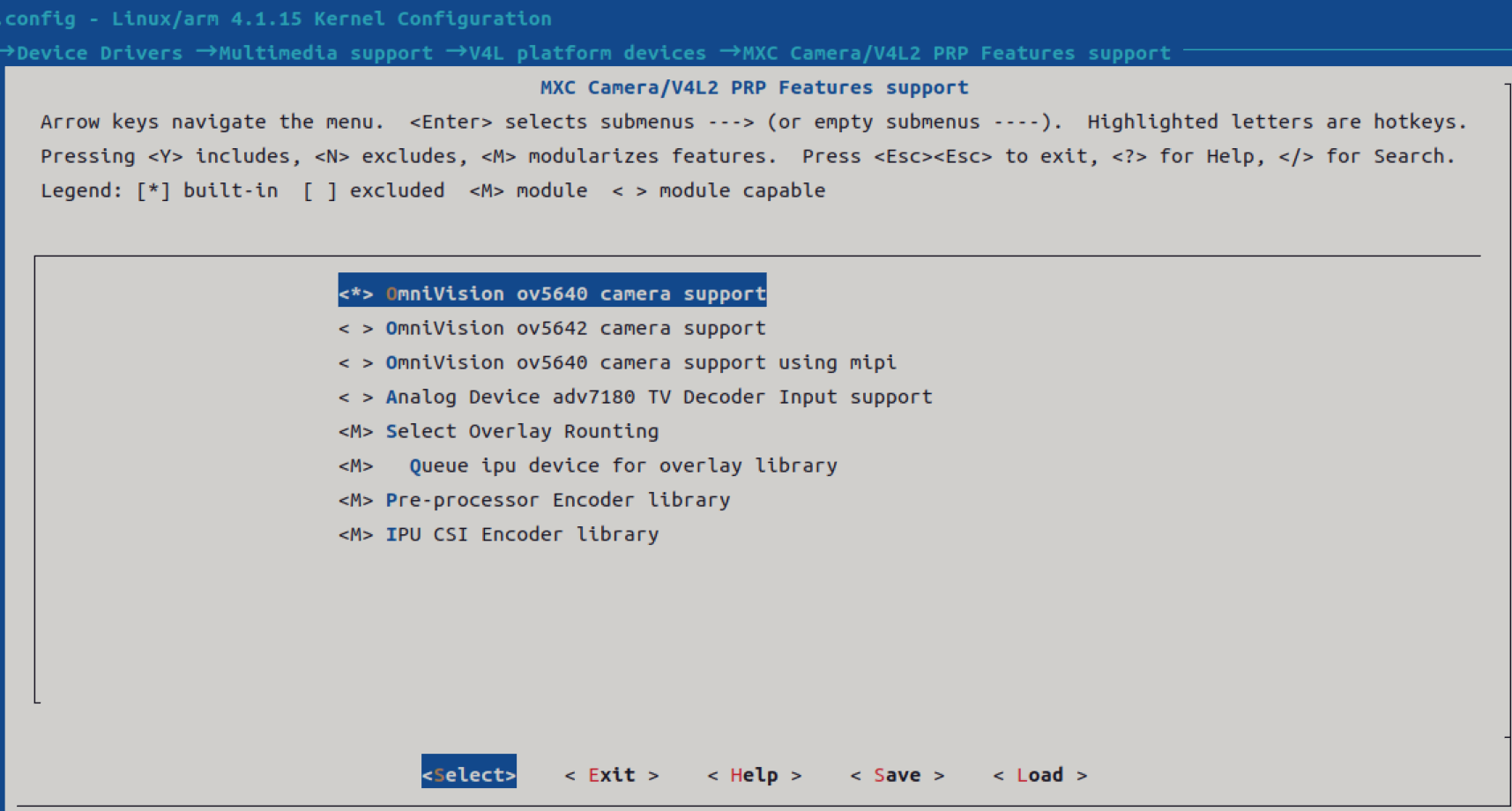
然后进行save保存
2.4编译
编译内核:make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j10 > /dev/null (-j10 > /dev/null:10核编译且仅输出错误信息)
编译设备树:make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- dtbs
2.5测试
获取正点原子官方提供的ov5640应用层的测试代码,用来检测设备树,内核和驱动是否正常。
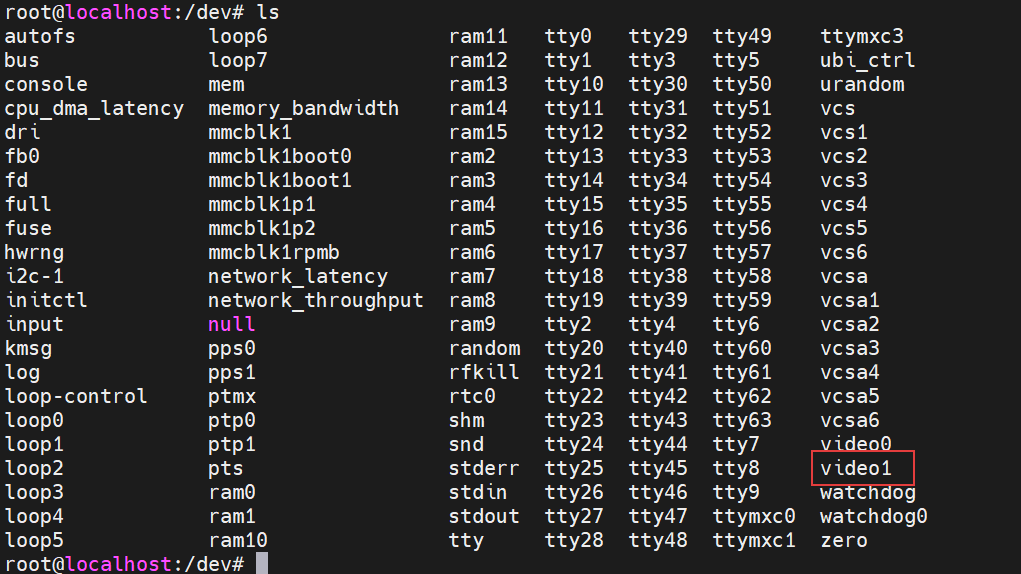
先将上面编译好的mx6s_capture.ko和ov5640.ko拷贝到开发板的根目录下,通过insmod命令进行加载驱动
bash
insmod mx6s_capture.ko
insmod ov5640.ko然后检查dev目录下是否有video1设备文件(USB摄像头是video0)
编译测试代码
bash
/***************************************************************
Copyright ? ALIENTEK Co., Ltd. 1998-2021. All rights reserved.
文件名 : v4l2_camera.c
作者 : 邓涛
版本 : V1.0
描述 : V4L2摄像头应用编程实战
其他 : 无
论坛 : www.openedv.com
日志 : 初版 V1.0 2021/7/09 邓涛创建
***************************************************************/
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <string.h>
#include <errno.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#include <linux/fb.h>
#include <time.h>
#include <linux/rtc.h>
#include <sys/time.h>
#define FB_DEV "/dev/fb0" // LCD设备节点
#define FRAMEBUFFER_COUNT 3 // 帧缓冲数量
#define RTC_DEV "/dev/rtc0" // RTC设备节点,fd名称
/*** 摄像头像素格式及其描述信息 ***/
typedef struct camera_format
{
unsigned char description[32]; // 字符串描述信息
unsigned int pixelformat; // 像素格式
} cam_fmt;
/*** 描述一个帧缓冲的信息 ***/
typedef struct cam_buf_info
{
unsigned short *start; // 帧缓冲起始地址
unsigned long length; // 帧缓冲长度
} cam_buf_info;
unsigned short timeBUuffer[1024 * 64 * 2]; // 存放时间的像素点信息
static int width; // LCD宽度
static int height; // LCD高度
static unsigned short *screen_base = NULL; // LCD显存基地址
static int fb_fd = -1; // LCD设备文件描述符
static int v4l2_fd = -1; // 摄像头设备文件描述符
static cam_buf_info buf_infos[FRAMEBUFFER_COUNT];
static cam_fmt cam_fmts[10];
static int frm_width, frm_height; // 视频帧宽度和高度
static int fb_dev_init(void)
{
struct fb_var_screeninfo fb_var = {0};
struct fb_fix_screeninfo fb_fix = {0};
unsigned long screen_size;
/* 打开framebuffer设备 */
fb_fd = open(FB_DEV, O_RDWR);
if (0 > fb_fd)
{
fprintf(stderr, "open error: %s: %s\n", FB_DEV, strerror(errno));
return -1;
}
/* 获取framebuffer设备信息 */
ioctl(fb_fd, FBIOGET_VSCREENINFO, &fb_var);
ioctl(fb_fd, FBIOGET_FSCREENINFO, &fb_fix);
screen_size = fb_fix.line_length * fb_var.yres;
width = fb_var.xres;
height = fb_var.yres;
/* 内存映射 */
screen_base = mmap(NULL, screen_size, PROT_READ | PROT_WRITE, MAP_SHARED, fb_fd, 0);
if (MAP_FAILED == (void *)screen_base)
{
perror("mmap error");
close(fb_fd);
return -1;
}
/* LCD背景刷白 */
memset(screen_base, 0xF800, screen_size);
return 0;
}
static int v4l2_dev_init(const char *device)
{
struct v4l2_capability cap = {0};
/* 打开摄像头 */
v4l2_fd = open(device, O_RDWR);
if (0 > v4l2_fd)
{
fprintf(stderr, "open error: %s: %s\n", device, strerror(errno));
return -1;
}
/* 查询设备功能 */
ioctl(v4l2_fd, VIDIOC_QUERYCAP, &cap);
/* 判断是否是视频采集设备 */
if (!(V4L2_CAP_VIDEO_CAPTURE & cap.capabilities))
{
fprintf(stderr, "Error: %s: No capture video device!\n", device);
close(v4l2_fd);
return -1;
}
return 0;
}
static void v4l2_enum_formats(void)
{
struct v4l2_fmtdesc fmtdesc = {0};
/* 枚举摄像头所支持的所有像素格式以及描述信息 */
fmtdesc.index = 0;
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FMT, &fmtdesc))
{
// 将枚举出来的格式以及描述信息存放在数组中
cam_fmts[fmtdesc.index].pixelformat = fmtdesc.pixelformat;
strcpy(cam_fmts[fmtdesc.index].description, fmtdesc.description);
fmtdesc.index++;
}
}
static void v4l2_print_formats(void)
{
struct v4l2_frmsizeenum frmsize = {0};
struct v4l2_frmivalenum frmival = {0};
int i;
frmsize.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
frmival.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
for (i = 0; cam_fmts[i].pixelformat; i++)
{
printf("format<0x%x>, description<%s>\n", cam_fmts[i].pixelformat,
cam_fmts[i].description);
/* 枚举出摄像头所支持的所有视频采集分辨率 */
frmsize.index = 0;
frmsize.pixel_format = cam_fmts[i].pixelformat;
frmival.pixel_format = cam_fmts[i].pixelformat;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMESIZES, &frmsize))
{
printf("size<%d*%d> ",
frmsize.discrete.width,
frmsize.discrete.height);
frmsize.index++;
/* 获取摄像头视频采集帧率 */
frmival.index = 0;
frmival.width = frmsize.discrete.width;
frmival.height = frmsize.discrete.height;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMEINTERVALS, &frmival))
{
printf("<%dfps>", frmival.discrete.denominator /
frmival.discrete.numerator);
frmival.index++;
}
printf("\n");
}
printf("\n");
}
}
static int v4l2_set_format(void)
{
struct v4l2_format fmt = {0};
struct v4l2_streamparm streamparm = {0};
/* 设置帧格式 */
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; // type类型
fmt.fmt.pix.width = width; // 视频帧宽度
fmt.fmt.pix.height = height; // 视频帧高度
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RGB565;
// V4L2_PIX_FMT_RGB565; // 像素格式
// fmt.fmt.pix.field = V4L2_FIELD_ANY;
if (0 > ioctl(v4l2_fd, VIDIOC_S_FMT, &fmt))
{
fprintf(stderr, "ioctl error: VIDIOC_S_FMT: %s\n", strerror(errno));
return -1;
}
/*** 判断是否已经设置为我们要求的RGB565像素格式
如果没有设置成功表示该设备不支持RGB565像素格式 */
if (V4L2_PIX_FMT_RGB565 != fmt.fmt.pix.pixelformat)
{
fprintf(stderr, "Error: the device does not support RGB565 format!\n");
return -1;
}
frm_width = fmt.fmt.pix.width; // 获取实际的帧宽度
frm_height = fmt.fmt.pix.height; // 获取实际的帧高度
printf("视频帧大小<%d * %d>\n", frm_width, frm_height);
/* 获取streamparm */
streamparm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(v4l2_fd, VIDIOC_G_PARM, &streamparm);
/** 判断是否支持帧率设置 **/
if (V4L2_CAP_TIMEPERFRAME & streamparm.parm.capture.capability)
{
streamparm.parm.capture.timeperframe.numerator = 1;
streamparm.parm.capture.timeperframe.denominator = 30; // 30fps
if (0 > ioctl(v4l2_fd, VIDIOC_S_PARM, &streamparm))
{
fprintf(stderr, "ioctl error: VIDIOC_S_PARM: %s\n", strerror(errno));
return -1;
}
}
return 0;
}
static int v4l2_init_buffer(void)
{
struct v4l2_requestbuffers reqbuf = {0};
struct v4l2_buffer buf = {0};
/* 申请帧缓冲 */
reqbuf.count = FRAMEBUFFER_COUNT; // 帧缓冲的数量
reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuf.memory = V4L2_MEMORY_MMAP;
if (0 > ioctl(v4l2_fd, VIDIOC_REQBUFS, &reqbuf))
{
fprintf(stderr, "ioctl error: VIDIOC_REQBUFS: %s\n", strerror(errno));
return -1;
}
/* 建立内存映射 */
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++)
{
ioctl(v4l2_fd, VIDIOC_QUERYBUF, &buf);
buf_infos[buf.index].length = buf.length;
buf_infos[buf.index].start = mmap(NULL, buf.length,
PROT_READ | PROT_WRITE, MAP_SHARED,
v4l2_fd, buf.m.offset);
if (MAP_FAILED == buf_infos[buf.index].start)
{
perror("mmap error");
return -1;
}
}
/* 入队 */
for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++)
{
if (0 > ioctl(v4l2_fd, VIDIOC_QBUF, &buf))
{
fprintf(stderr, "ioctl error: VIDIOC_QBUF: %s\n", strerror(errno));
return -1;
}
}
return 0;
}
static int v4l2_stream_on(void)
{
/* 打开摄像头、摄像头开始采集数据 */
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (0 > ioctl(v4l2_fd, VIDIOC_STREAMON, &type))
{
fprintf(stderr, "ioctl error: VIDIOC_STREAMON: %s\n", strerror(errno));
return -1;
}
return 0;
}
static void v4l2_read_data(void)
{
struct v4l2_buffer buf = {0};
unsigned short *base;
unsigned short *start;
int min_w, min_h;
int j,i;
if (width > frm_width)
min_w = frm_width;
else
min_w = width;
if (height > frm_height)
min_h = frm_height;
else
min_h = height;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
for ( ; ; ) {
for(buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {
ioctl(v4l2_fd, VIDIOC_DQBUF, &buf); //出队
for (j = 0, base=screen_base, start=buf_infos[buf.index].start;
j < min_h; j++) {
memcpy(base, start, min_w * 2); //RGB565 一个像素占2个字节
#if 0
for (i = 0; i < 1024;i++)
{
printf("%d\r\n", base[i]);
}
#endif
base += width; // LCD显示指向下一行
start += frm_width;//指向下一行数据
}
// 数据处理完之后、再入队、往复
ioctl(v4l2_fd, VIDIOC_QBUF, &buf);
}
}
}
int main(int argc, char *argv[])
{
if (2 != argc)
{
fprintf(stderr, "Usage: %s <video_dev>\n", argv[0]);
exit(EXIT_FAILURE);
}
/* 初始化LCD */
if (fb_dev_init())
exit(EXIT_FAILURE);
/* 初始化摄像头 */
if (v4l2_dev_init(argv[1]))
exit(EXIT_FAILURE);
/* 枚举所有格式并打印摄像头支持的分辨率及帧率 */
v4l2_enum_formats();
v4l2_print_formats();
/* 设置格式 */
if (v4l2_set_format())
exit(EXIT_FAILURE);
/* 初始化帧缓冲:申请、内存映射、入队 */
if (v4l2_init_buffer())
exit(EXIT_FAILURE);
/* 开启视频采集 */
if (v4l2_stream_on())
exit(EXIT_FAILURE);
/* 读取数据:出队 */
v4l2_read_data(); // 在函数内循环采集数据、将其显示到LCD屏
exit(EXIT_SUCCESS);
}编译运行画面如下
3.应用层
3.1概述
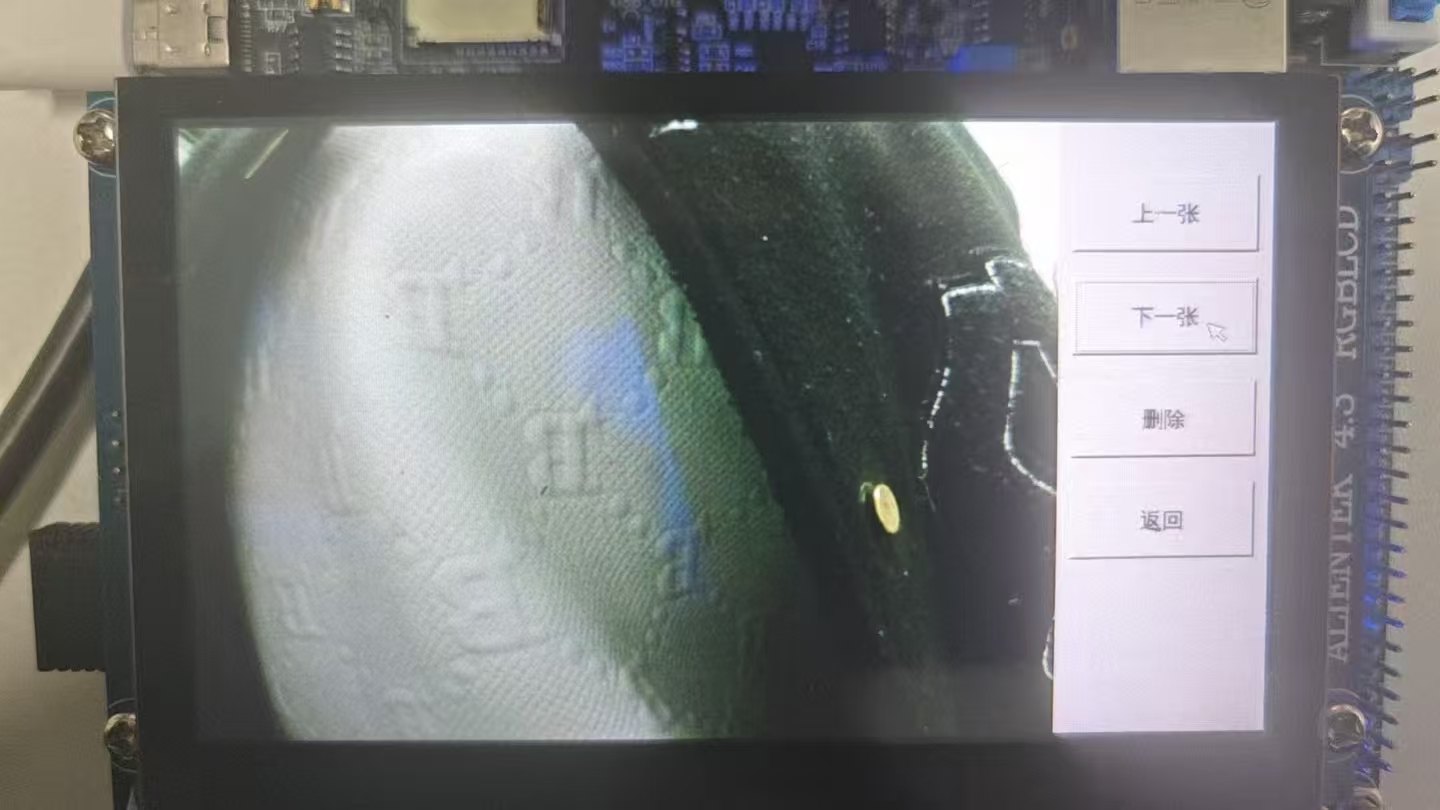
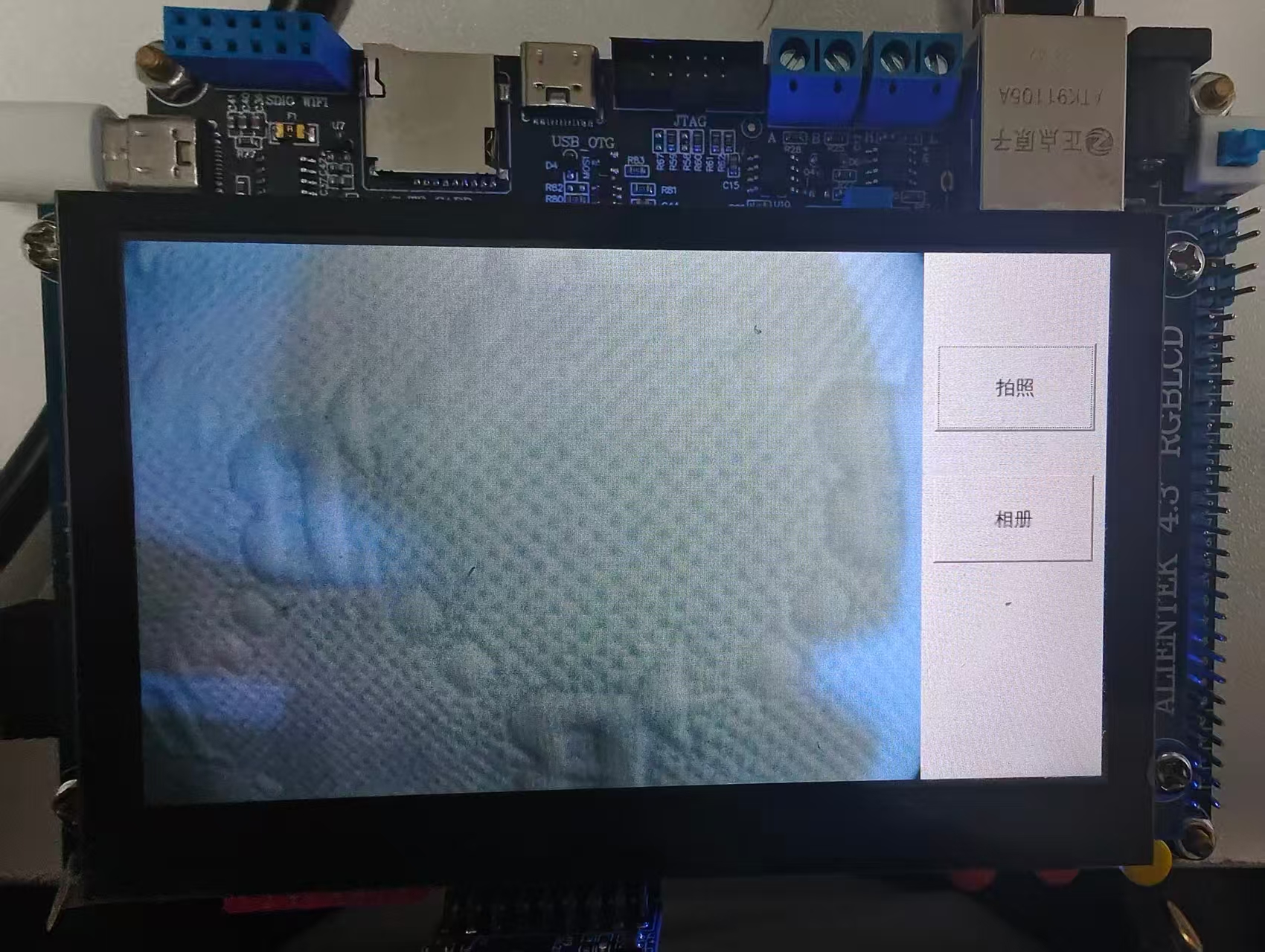
基于v4l2应用编程结合正点原子官方的代码在qt中创建一个单独的线程去获取摄像头图像数据,图像数据格式为RGB565,尺寸640x480,以帧格式在队列中缓存,留出160x480的显示屏做qt的ui按键交互界面,主界面为相机界面,接收摄像头数据并显示在界面左侧640x480,右侧为拍照和相册俩个按键,拍的照片存储在当前目录下的opt/photos目录,副界面为相册界面,负责显示存储在opt/photos目录下的照片,并配有切换照片、删除照片和返回相机按键,具体项目代码如下:
3.2代码实现
qt_camera.pro
bash
QT += core gui
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
CONFIG += c++11
# You can make your code fail to compile if it uses deprecated APIs.
# In order to do so, uncomment the following line.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
albumwindow.cpp \
camerathread.cpp \
main.cpp \
mainwindow.cpp \
v4l2_camera.cpp
HEADERS += \
albumwindow.h \
camerathread.h \
mainwindow.h \
v4l2_camera.h
FORMS += \
mainwindow.ui
# 启用JPG/PNG图片支持
DEFINES += QT_NO_WARNING_OUTPUT
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += targetalbumwindow.h (相册)
cpp
#ifndef ALBUMWINDOW_H
#define ALBUMWINDOW_H
#include <QWidget>
#include <QPushButton>
#include <QLabel>
#include <QFileInfoList>
class AlbumWindow : public QWidget
{
Q_OBJECT
public:
explicit AlbumWindow(QWidget *parent = nullptr);
protected:
void showEvent(QShowEvent *event) override;
void hideEvent(QHideEvent *event) override;
private slots:
void prevPhoto();
void nextPhoto();
void deletePhoto();
void backToCamera();
private:
void loadPhotoList();
void showCurrentPhoto();
void updateButtonState();
QLabel *m_showLab;
QPushButton *m_prevBtn;
QPushButton *m_nextBtn;
QPushButton *m_delBtn;
QPushButton *m_backBtn;
QFileInfoList m_photoList;
int m_currentIndex;
};
#endifalbumwindow.c
cpp
#include "albumwindow.h"
#include <QDir>
#include <QFile>
#include <QDebug>
#include <QPixmap>
#include <QHBoxLayout>
#include <QVBoxLayout>
#include "v4l2_camera.h"
AlbumWindow::AlbumWindow(QWidget *parent) : QWidget(parent)
{
// 窗口大小800*480
this->setFixedSize(800, 480);
this->setWindowTitle("Album");
this->setAutoFillBackground(true);
this->setStyleSheet("background-color: black;");
// ===================== 照片显示区(640*480)=====================
m_showLab = new QLabel(this);
m_showLab->setFixedSize(640, 480);
m_showLab->setStyleSheet(
"background-color: black;"
"color: white;"
"font-size: 24px;"
"border: none;"
);
m_showLab->setAlignment(Qt::AlignCenter);
m_showLab->setScaledContents(false);
// ===================== 右侧按键区(160*480)=====================
QWidget *btnWidget = new QWidget(this);
btnWidget->setFixedSize(160, 480);
btnWidget->setStyleSheet("background-color: #f0f0f0;");
QVBoxLayout *btnLayout = new QVBoxLayout(btnWidget);
btnLayout->setSpacing(20);
btnLayout->setContentsMargins(10, 40, 10, 40);
m_prevBtn = new QPushButton("上一张");
m_nextBtn = new QPushButton("下一张");
m_delBtn = new QPushButton("删除");
m_backBtn = new QPushButton("返回");
// 按键ui
m_prevBtn->setFixedHeight(60);
m_nextBtn->setFixedHeight(60);
m_delBtn->setFixedHeight(60);
m_backBtn->setFixedHeight(60);
btnLayout->addWidget(m_prevBtn);
btnLayout->addWidget(m_nextBtn);
btnLayout->addWidget(m_delBtn);
btnLayout->addWidget(m_backBtn);
btnLayout->addStretch();
// ===================== 水平布局=====================
QHBoxLayout *mainLayout = new QHBoxLayout(this);
mainLayout->addWidget(m_showLab);
mainLayout->addWidget(btnWidget);
mainLayout->setContentsMargins(0, 0, 0, 0);
mainLayout->setSpacing(0);
this->setLayout(mainLayout);
// 信号绑定
connect(m_prevBtn, &QPushButton::clicked, this, &AlbumWindow::prevPhoto);
connect(m_nextBtn, &QPushButton::clicked, this, &AlbumWindow::nextPhoto);
connect(m_delBtn, &QPushButton::clicked, this, &AlbumWindow::deletePhoto);
connect(m_backBtn, &QPushButton::clicked, this, &AlbumWindow::backToCamera);
// 初始化
m_currentIndex = 0;
loadPhotoList();
showCurrentPhoto();
updateButtonState();
qDebug() << "Album interface initialized (layout fixed)";
}
// 打开相册
void AlbumWindow::showEvent(QShowEvent *event)
{
QWidget::showEvent(event);
g_enable_render = false;
loadPhotoList();
showCurrentPhoto();
updateButtonState();
qDebug() << "Album: Stop camera render + refresh photos";
}
void AlbumWindow::hideEvent(QHideEvent *event)
{
QWidget::hideEvent(event);
g_enable_render = true;
qDebug() << "Camera: Resume camera render";
}
// 加载相册照片列表
void AlbumWindow::loadPhotoList()
{
QDir dir("/opt/photos/");
QStringList filters = {"*.jpg", "*.png", "*.bmp"};
m_photoList = dir.entryInfoList(filters, QDir::Files, QDir::Time);
}
// 显示照片
void AlbumWindow::showCurrentPhoto()
{
if (m_photoList.isEmpty()) {
m_showLab->setText("暂无照片");
return;
}
// 索引保护
if (m_currentIndex < 0) m_currentIndex = 0;
if (m_currentIndex >= m_photoList.size()) m_currentIndex = m_photoList.size() - 1;
QString path = m_photoList[m_currentIndex].filePath();
QPixmap pix(path);
if (!pix.isNull()) {
pix = pix.scaled(640, 480, Qt::KeepAspectRatio, Qt::SmoothTransformation);
m_showLab->setPixmap(pix);
qDebug() << "Display photo (640*480):" << path;
} else {
m_showLab->setText("Image Error");
}
}
// 更新按钮状态
void AlbumWindow::updateButtonState()
{
bool enable = !m_photoList.isEmpty();
m_prevBtn->setEnabled(enable);
m_nextBtn->setEnabled(enable);
m_delBtn->setEnabled(enable);
}
// 上一张照片
void AlbumWindow::prevPhoto()
{
if (m_photoList.isEmpty()) return;
m_currentIndex = (m_currentIndex - 1 + m_photoList.size()) % m_photoList.size();
showCurrentPhoto();
qDebug() << "Switch to previous photo";
}
// 下一张照片
void AlbumWindow::nextPhoto()
{
if (m_photoList.isEmpty()) return;
m_currentIndex = (m_currentIndex + 1) % m_photoList.size();
showCurrentPhoto();
qDebug() << "Switch to next photo";
}
// 删除当前照片并显示下一张
void AlbumWindow::deletePhoto()
{
if (m_photoList.isEmpty()) return;
QString path = m_photoList[m_currentIndex].filePath();
QFile::remove(path);
qDebug() << "Delete photo:" << path;
loadPhotoList();
showCurrentPhoto();
updateButtonState();
}
// 返回相机界面
void AlbumWindow::backToCamera()
{
this->hide();
qDebug() << "Back to camera interface";
}camerathread.h (摄像头采集线程)
cpp
#ifndef CAMERATHREAD_H
#define CAMERATHREAD_H
#include <QThread>
// 摄像头采集线程
class CameraThread : public QThread
{
Q_OBJECT
public:
explicit CameraThread(QObject *parent = nullptr);
protected:
void run() override; // 线程入口函数
};
#endif // CAMERATHREAD_Hcamerathread.c
cpp
#include "camerathread.h"
#include "v4l2_camera.h"
#include <QDebug>
CameraThread::CameraThread(QObject *parent) : QThread(parent)
{
}
void CameraThread::run()
{
qDebug() << "Camera thread started, device:/dev/video1";
// 初始化OV5640摄像头
int ret = camera_init("/dev/video1");
if (ret < 0) {
qDebug() << "Camera init failed!";
return;
}
qDebug() << "Camera init success, start capturing...";
// 启动采集
camera_start_capture();
}mainwindow.h (相机主界面)
cpp
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QMainWindow>
#include <QPushButton>
#include <QWidget>
#include <QVBoxLayout>
#include <QHBoxLayout>
#include "camerathread.h"
#include "albumwindow.h"
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
~MainWindow();
private slots:
void capturePhoto(); // 拍照
void openAlbum(); // 打开相册
private:
QWidget *m_centralWidget;
QLabel *m_previewLab; // 预览占位区
QPushButton *m_captureBtn;
QPushButton *m_albumBtn;
CameraThread *m_camThread; // 摄像头采集线程
AlbumWindow *m_albumWin; // 相册窗口
};
#endif // MAINWINDOW_Hmainwindow.c
cpp
#include "mainwindow.h"
#include <QLabel>
#include <QDateTime>
#include <QFile>
#include <QDebug>
#include "v4l2_camera.h"
#include <QDir>
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
{
// 固定窗口大小
this->setFixedSize(800, 480);
this->setWindowTitle("OV5640 Camera");
// 中心部件
m_centralWidget = new QWidget(this);
this->setCentralWidget(m_centralWidget);
// 1. 左侧预览区
m_previewLab = new QLabel(m_centralWidget);
m_previewLab->setFixedSize(640, 480);
m_previewLab->setStyleSheet("background-color:black;");
m_previewLab->setText("Camera Preview");
m_previewLab->setAlignment(Qt::AlignCenter);
// 2. 右侧按键区
QWidget *btnWidget = new QWidget(m_centralWidget);
btnWidget->setFixedSize(160, 480);
QVBoxLayout *btnLayout = new QVBoxLayout(btnWidget);
btnLayout->setSpacing(40);
btnLayout->setContentsMargins(10, 80, 10, 80);
m_captureBtn = new QPushButton("拍照");
m_albumBtn = new QPushButton("相册");
m_captureBtn->setFixedHeight(80);
m_albumBtn->setFixedHeight(80);
btnLayout->addWidget(m_captureBtn);
btnLayout->addWidget(m_albumBtn);
btnLayout->addStretch();
// 主布局
QHBoxLayout *mainLayout = new QHBoxLayout(m_centralWidget);
mainLayout->addWidget(m_previewLab);
mainLayout->addWidget(btnWidget);
mainLayout->setContentsMargins(0,0,0,0);
mainLayout->setSpacing(0);
m_centralWidget->setLayout(mainLayout);
// 绑定信号槽
connect(m_captureBtn, &QPushButton::clicked, this, &MainWindow::capturePhoto);
connect(m_albumBtn, &QPushButton::clicked, this, &MainWindow::openAlbum);
// 初始化摄像头线程
m_camThread = new CameraThread(this);
m_camThread->start(); // 启动采集线程
// 初始化相册窗口
m_albumWin = new AlbumWindow();
qDebug() << "Main window created, camera thread started";
}
MainWindow::~MainWindow()
{
m_camThread->quit();
m_camThread->wait();
delete m_albumWin;
}
//拍照
void MainWindow::capturePhoto()
{
if (!screen_base) {
qDebug() << "Capture failed: camera not initialized";
return;
}
QDir dir;
if (!dir.exists("/opt/photos")) {
dir.mkpath("/opt/photos");
qDebug() << "Create photo directory: /opt/photos";
}
QString fileName = QDateTime::currentDateTime().toString("yyyyMMdd_hhmmss") + ".jpg";
QString filePath = "/opt/photos/" + fileName;
QImage image((uchar *)screen_base, 640, 480, 800*2, QImage::Format_RGB16);
bool save_ret = image.save(filePath, "JPG", 100);
if (save_ret) {
qDebug() << "Capture success! Save to:" << filePath;
} else {
qDebug() << "Capture failed! Cannot save image";
}
}
// 打开相册
void MainWindow::openAlbum()
{
m_albumWin->show();
qDebug() << "Open album window";
}v4l2_camera.h (v4l2解析摄像头数据)
cpp
#ifndef V4L2_CAMERA_H
#define V4L2_CAMERA_H
#include <stdint.h>
extern unsigned short *screen_base;
// 是否允许渲染画面到LCD(true=允许,false=禁止)
extern bool g_enable_render;
#ifdef __cplusplus
extern "C" {
#endif
int camera_init(const char *device);
void camera_start_capture(void);
#ifdef __cplusplus
}
#endif
#endifv4l2_camera.c
cpp
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <string.h>
#include <errno.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#include <linux/fb.h>
#include <time.h>
#include <linux/rtc.h>
#include <sys/time.h>
#include "v4l2_camera.h"
#define FB_DEV "/dev/fb0" // LCD设备节点
#define FRAMEBUFFER_COUNT 3 // 帧缓冲数量
#define RTC_DEV "/dev/rtc0" // RTC设备节点
bool g_enable_render = true; // 默认允许渲染
/*** 摄像头像素格式及其描述信息 ***/
typedef struct camera_format
{
unsigned char description[32];
unsigned int pixelformat;
} cam_fmt;
/*** 帧缓冲信息 ***/
typedef struct cam_buf_info
{
unsigned short *start;
unsigned long length;
} cam_buf_info;
unsigned short timeBUuffer[1024 * 64 * 2];
static int width = 640; // 固定:左预览区宽度640
static int height = 480; // 固定:预览区高度480
unsigned short *screen_base = NULL; // LCD显存基地址(删除static,对外暴露)
static int fb_fd = -1;
static int v4l2_fd = -1;
static cam_buf_info buf_infos[FRAMEBUFFER_COUNT];
static cam_fmt cam_fmts[10];
static int frm_width, frm_height;
// LCD初始化
static int fb_dev_init(void)
{
struct fb_var_screeninfo fb_var = {0};
struct fb_fix_screeninfo fb_fix = {0};
unsigned long screen_size;
fb_fd = open(FB_DEV, O_RDWR);
if (0 > fb_fd)
{
fprintf(stderr, "open error: %s: %s\n", FB_DEV, strerror(errno));
return -1;
}
ioctl(fb_fd, FBIOGET_VSCREENINFO, &fb_var);
ioctl(fb_fd, FBIOGET_FSCREENINFO, &fb_fix);
screen_size = fb_fix.line_length * fb_var.yres;
// 保留原LCD分辨率,仅渲染640*480区域
width = 640;
height = 480;
screen_base = (unsigned short *)mmap(NULL, screen_size, PROT_READ | PROT_WRITE, MAP_SHARED, fb_fd, 0);
if (MAP_FAILED == (void *)screen_base)
{
perror("mmap error");
close(fb_fd);
return -1;
}
memset(screen_base, 0xF800, screen_size);
return 0;
}
// 摄像头设备初始化
static int v4l2_dev_init(const char *device)
{
struct v4l2_capability cap = {0};
v4l2_fd = open(device, O_RDWR);
if (0 > v4l2_fd)
{
fprintf(stderr, "open error: %s: %s\n", device, strerror(errno));
return -1;
}
ioctl(v4l2_fd, VIDIOC_QUERYCAP, &cap);
if (!(V4L2_CAP_VIDEO_CAPTURE & cap.capabilities))
{
fprintf(stderr, "Error: %s: No capture video device!\n", device);
close(v4l2_fd);
return -1;
}
return 0;
}
// 枚举摄像头格式
static void v4l2_enum_formats(void)
{
struct v4l2_fmtdesc fmtdesc = {0};
fmtdesc.index = 0;
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FMT, &fmtdesc))
{
cam_fmts[fmtdesc.index].pixelformat = fmtdesc.pixelformat;
strcpy((char *)cam_fmts[fmtdesc.index].description, (char *)fmtdesc.description);
fmtdesc.index++;
}
}
// 打印摄像头格式
static void v4l2_print_formats(void)
{
struct v4l2_frmsizeenum frmsize = {0};
struct v4l2_frmivalenum frmival = {0};
int i;
frmsize.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
frmival.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
for (i = 0; cam_fmts[i].pixelformat; i++)
{
printf("format<0x%x>, description<%s>\n", cam_fmts[i].pixelformat,
cam_fmts[i].description);
frmsize.index = 0;
frmsize.pixel_format = cam_fmts[i].pixelformat;
frmival.pixel_format = cam_fmts[i].pixelformat;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMESIZES, &frmsize))
{
printf("size<%d*%d> ",
frmsize.discrete.width,
frmsize.discrete.height);
frmsize.index++;
frmival.index = 0;
frmival.width = frmsize.discrete.width;
frmival.height = frmsize.discrete.height;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMEINTERVALS, &frmival))
{
printf("<%dfps>", frmival.discrete.denominator /
frmival.discrete.numerator);
frmival.index++;
}
printf("\n");
}
printf("\n");
}
}
// 设置摄像头格式(640*480 RGB565)
static int v4l2_set_format(void)
{
struct v4l2_format fmt = {0};
struct v4l2_streamparm streamparm = {0};
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = 640; // 固定宽度
fmt.fmt.pix.height = 480; // 固定高度
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RGB565;
if (0 > ioctl(v4l2_fd, VIDIOC_S_FMT, &fmt))
{
fprintf(stderr, "ioctl error: VIDIOC_S_FMT: %s\n", strerror(errno));
return -1;
}
if (V4L2_PIX_FMT_RGB565 != fmt.fmt.pix.pixelformat)
{
fprintf(stderr, "Error: the device does not support RGB565 format!\n");
return -1;
}
frm_width = fmt.fmt.pix.width;
frm_height = fmt.fmt.pix.height;
printf("Video size<%d * %d>\n", frm_width, frm_height);
streamparm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(v4l2_fd, VIDIOC_G_PARM, &streamparm);
if (V4L2_CAP_TIMEPERFRAME & streamparm.parm.capture.capability)
{
streamparm.parm.capture.timeperframe.numerator = 1;
streamparm.parm.capture.timeperframe.denominator = 30;
if (0 > ioctl(v4l2_fd, VIDIOC_S_PARM, &streamparm))
{
fprintf(stderr, "ioctl error: VIDIOC_S_PARM: %s\n", strerror(errno));
return -1;
}
}
return 0;
}
// 初始化帧缓冲
static int v4l2_init_buffer(void)
{
struct v4l2_requestbuffers reqbuf = {0};
struct v4l2_buffer buf = {0};
reqbuf.count = FRAMEBUFFER_COUNT;
reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuf.memory = V4L2_MEMORY_MMAP;
if (0 > ioctl(v4l2_fd, VIDIOC_REQBUFS, &reqbuf))
{
fprintf(stderr, "ioctl error: VIDIOC_REQBUFS: %s\n", strerror(errno));
return -1;
}
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++)
{
ioctl(v4l2_fd, VIDIOC_QUERYBUF, &buf);
buf_infos[buf.index].length = buf.length;
buf_infos[buf.index].start = (unsigned short *)mmap(NULL, buf.length,
PROT_READ | PROT_WRITE, MAP_SHARED,
v4l2_fd, buf.m.offset);
if (MAP_FAILED == buf_infos[buf.index].start)
{
perror("mmap error");
return -1;
}
}
for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++)
{
if (0 > ioctl(v4l2_fd, VIDIOC_QBUF, &buf))
{
fprintf(stderr, "ioctl error: VIDIOC_QBUF: %s\n", strerror(errno));
return -1;
}
}
return 0;
}
// 开启视频流
static int v4l2_stream_on(void)
{
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (0 > ioctl(v4l2_fd, VIDIOC_STREAMON, &type))
{
fprintf(stderr, "ioctl error: VIDIOC_STREAMON: %s\n", strerror(errno));
return -1;
}
return 0;
}
static void v4l2_read_data(void)
{
struct v4l2_buffer buf = {0};
unsigned short *base;
unsigned short *start;
int min_w, min_h;
int j,i;
if (width > frm_width)
min_w = frm_width;
else
min_w = width;
if (height > frm_height)
min_h = frm_height;
else
min_h = height;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
for ( ; ; )
{
for(buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++)
{
ioctl(v4l2_fd, VIDIOC_DQBUF, &buf); // 出队(必须一直执行)
if(g_enable_render)
{
for (j = 0, base=screen_base, start=buf_infos[buf.index].start; j < min_h; j++) {
memcpy(base, start, min_w * 2);
base += 800;
start += frm_width;
}
}
ioctl(v4l2_fd, VIDIOC_QBUF, &buf); // 入队(必须一直执行)
}
}
}
// 对外接口:摄像头初始化
int camera_init(const char *device)
{
// 初始化LCD
if (fb_dev_init())
return -1;
// 初始化摄像头
if (v4l2_dev_init(device))
return -1;
// 枚举格式
v4l2_enum_formats();
v4l2_print_formats();
// 设置格式
if (v4l2_set_format())
return -1;
// 初始化缓冲
if (v4l2_init_buffer())
return -1;
// 开启流
if (v4l2_stream_on())
return -1;
return 0;
}
// 对外接口:开始采集
void camera_start_capture(void)
{
v4l2_read_data();
}main.cpp
cpp
#include "mainwindow.h"
#include <QApplication>
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
}编译运行之后显示画面如下:
相机主界面
相册界面