引言
在电力电子开发中,将直流电(DC)转换为交流电(AC)的逆变电路设计门槛较高。初学者搭建第一台逆变器时,往往直接照搬开源原理图,却忽略了工作原理与参数裕量设计,最终频繁出现功率管烧毁、输出波形畸变等问题。
本系列课程基于一块桌面级单相逆变开发板(输入 40~50V,输出 24V@50Hz,最大电流 2A),带你告别"照抄原理图",以严谨的工程视角完成逆变系统的全流程开发。
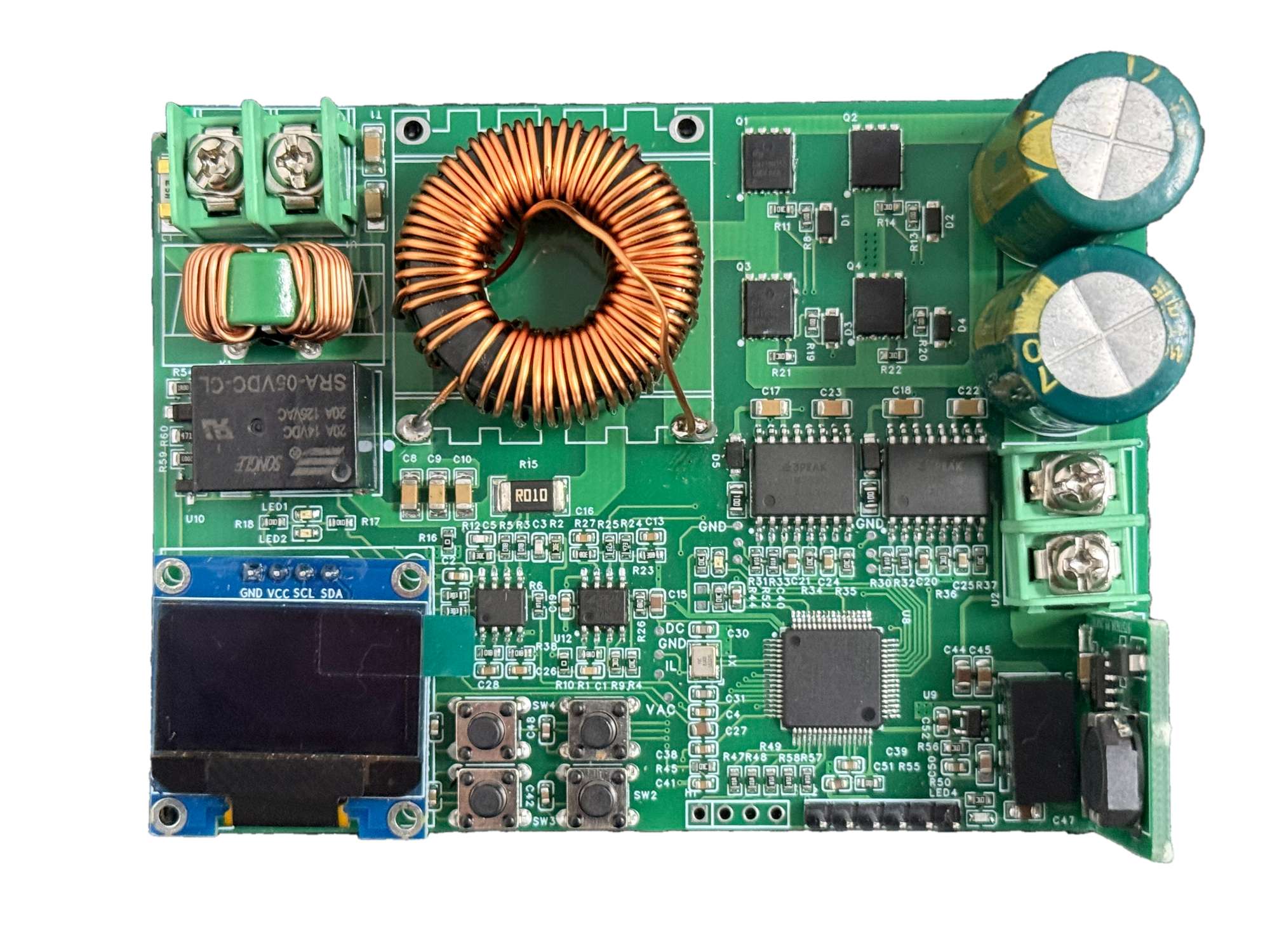
本讲聚焦硬件主电路,详细分析全桥拓扑的工作原理,以及各关键硬件参数的推导过程。
一、单相逆变器工作原理
逆变器的核心任务是将直流电转换为交流电。基本思路是:利用恒定的直流母线电压,通过高频开关动作与面积等效原理,合成出目标频率与幅值的交流正弦波。该过程由两个机制协同完成:
- 全桥拓扑:通过四个开关管的轮流导通,控制电流在负载上的正向与反向流动
- SPWM 调制:控制每个开关管的导通时长,使输出电压的平均值按正弦规律变化
1.1 全桥拓扑(H 桥):电流方向的切换
主功率回路由 4 个功率 MOSFET(Q1、Q2、Q3、Q4)组成全桥结构,后级接入由电感 L 和电容 C 构成的低通滤波器。
之所以称为 H 桥,是因为这四个开关管与负载的连接方式在电路图上形如字母"H"------负载悬挂在 H 的横梁位置,四个开关管分列两侧构成桥臂。
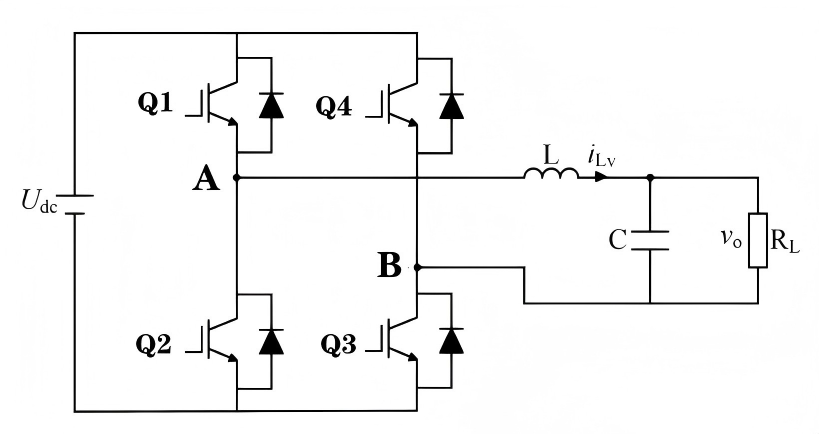
H 桥有两种工作状态,通过控制不同的对角开关管导通,改变电流流过负载的方向:
| 工作状态 | 导通管 | 电流路径 | 桥臂电压 |
|---|---|---|---|
| 正半周 | Q1、Q3 | 母线正极 → Q1 → A 点 → L → 负载 → B 点 → Q3 → 母线负极 | UAB=+UdcU_{AB} = +U_{dc}UAB=+Udc |
| 负半周 | Q2、Q4 | 母线正极 → Q4 → B 点 → 负载 → L → A 点 → Q2 → 母线负极 | UAB=−UdcU_{AB} = -U_{dc}UAB=−Udc |
单片机高频交替驱动这两组对角开关管,即可在桥臂中点 A、B 之间获得幅值为 ±Udc\pm U_{dc}±Udc 的高频方波序列。
1.2 面积等效原理与 LC 滤波:从方波到正弦波
桥臂直接输出的是高频方波,将其转化为平滑正弦波,依赖以下两个步骤。
① 面积等效原理
若一组窄脉冲序列与目标正弦波在相同时间段内的面积(电压对时间的积分)相等,且脉冲频率远高于正弦波频率,则该脉冲序列经低通滤波后可还原出对应的正弦波。
SPWM(正弦脉宽调制)正是基于此原理:通过连续调节每个脉冲的宽度,使每段脉冲的面积与对应时刻正弦波的面积相等,从而在滤波后还原出完整正弦波形。
② SPWM 调制逻辑
单片机内部,以 50Hz 正弦波作为调制波(uru_rur),以 50kHz 三角波作为载波(ucu_cuc),两者实时比较,产生驱动信号控制 H 桥开关管的通断:
- ur>ucu_r > u_cur>uc:输出高电平,驱动正半周对角管(Q1、Q3)导通,电流正向流过负载
- ur<ucu_r < u_cur<uc:输出低电平,驱动负半周对角管(Q2、Q4)导通,电流反向流过负载
由此输出的脉冲序列脉宽按正弦规律周期性变化,中间宽、两端窄。
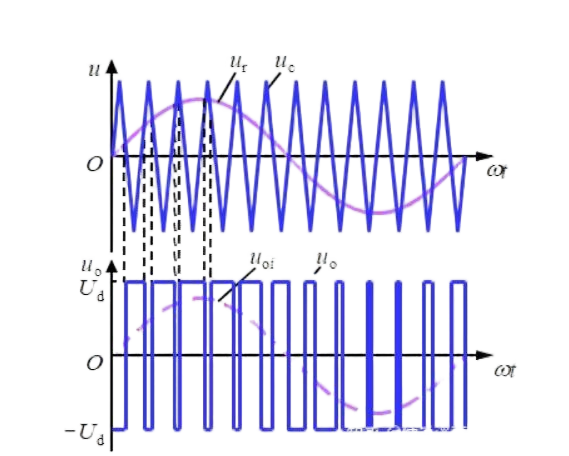
▲ 调制波形示意:uru_rur 正弦调制波;ucu_cuc 三角载波;uou_ouo 桥臂输出;uofu_{of}uof 滤波后输出
③ LC 低通滤波
桥臂输出的 uou_ouo 包含两类频率成分:
- 50Hz 基波:即目标正弦信号,需要保留
- 50kHz 及其谐波:开关动作引入的高频干扰,需要滤除
后级 LC 滤波器是一个二阶低通系统,截止频率以上以 −40 dB/dec 的速率衰减高频成分。电感 L 阻碍电流的快速变化,电容 C 将高频电压纹波旁路到地,两者配合将高次谐波大幅抑制,最终在负载端还原出平滑的 50Hz 正弦电压(即图中的 uofu_{of}uof)。
二、主电路硬件参数计算
基本参数确认:
- 输出电压有效值 Vo=24 VV_o = 24\text{ V}Vo=24 V,对应峰值 Vm=Vo×2=24×1.414≈34 VV_m = V_o \times \sqrt{2} = 24 \times 1.414 \approx 34\text{ V}Vm=Vo×2 =24×1.414≈34 V
- 单相 SPWM 的电压利用率最大为 1(即调制比 m≤1m \leq 1m≤1 时,输出峰值最大等于 UdcU_{dc}Udc),因此直流母线电压必须不低于输出峰值 34V
- 预留裕量后,额定母线电压选定为 Udc=45 VU_{dc} = 45\text{ V}Udc=45 V,上限 50V
2.1 功率管(MOSFET)选型
① 耐压要求
开关管承受的最大电压为母线电压上限 50V。考虑到开关瞬间因寄生电感产生的电压尖峰,耐压一般取 2 倍以上裕量,因此选择 100V 规格的 MOSFET。
② 开关速度要求
电路工作在 50kHz,每次上下管切换时,关断管的体二极管需要从导通状态恢复到截止状态,这个过程称为反向恢复 ,所需时间记为 TrrT_{rr}Trr。若 TrrT_{rr}Trr 过长,切换期间会出现短暂的上下管同时导通,引起额外损耗甚至烧管,因此需选用 TrrT_{rr}Trr 较短的快恢复型器件。
满足以上条件的常用器件:IRF640N(200V/18A)、IRF540N(100V/33A)。
2.2 LC 滤波器参数推导
前提说明: 以下公式适用于单极性 SPWM 调制方式。在单极性调制下,正弦波的正半周期间,桥臂输出仅在 +Udc+U_{dc}+Udc 与 000 之间切换(而非 ±Udc\pm U_{dc}±Udc),负半周则在 000 与 −Udc-U_{dc}−Udc 之间切换。相比双极性调制,单极性调制的电流纹波更小、谐波频率更高(等效开关频率翻倍),滤波器设计更为有利。
滤波电感 L 的计算
电感的取值需同时满足两个约束:上限由基波压降决定,下限由高频电流纹波决定。
约束一(上限):基波压降不能太大
电感在基波频率 50Hz 下具有感抗 XLX_LXL,会在自身两端产生压降,导致实际到达负载的电压低于设定值。工程上一般要求该压降不超过输出电压的 5%。
首先写出感抗表达式:
XL=2πf⋅LX_L = 2\pi f \cdot LXL=2πf⋅L
其中 f=50 Hzf = 50\text{ Hz}f=50 Hz 为基波频率。电感上的压降为额定电流乘以感抗:
ΔVL=Io⋅XL=Io⋅2πf⋅L\Delta V_L = I_o \cdot X_L = I_o \cdot 2\pi f \cdot LΔVL=Io⋅XL=Io⋅2πf⋅L
令其不超过输出电压的 5%:
Io⋅2πf⋅L≤5%×VoI_o \cdot 2\pi f \cdot L \leq 5\% \times V_oIo⋅2πf⋅L≤5%×Vo
解出 LLL 的上限:
L≤0.05×Vo2πf⋅IoL \leq \frac{0.05 \times V_o}{2\pi f \cdot I_o}L≤2πf⋅Io0.05×Vo
代入具体数值 Io=2 AI_o = 2\text{ A}Io=2 A,f=50 Hzf = 50\text{ Hz}f=50 Hz,Vo=24 VV_o = 24\text{ V}Vo=24 V:
Lmax=0.05×242π×50×2=1.2628.3≈1.91 mHL_{\max} = \frac{0.05 \times 24}{2\pi \times 50 \times 2} = \frac{1.2}{628.3} \approx 1.91\text{ mH}Lmax=2π×50×20.05×24=628.31.2≈1.91 mH
约束二(下限):高频电流纹波不能太大
开关动作会在电感上产生高频锯齿状电流纹波。纹波过大会增加器件损耗和输出噪声,工程上一般限制最大纹波不超过额定电流的 20%:
ΔImax=20%×Io=0.2×2=0.4 A\Delta I_{\max} = 20\% \times I_o = 0.2 \times 2 = 0.4\text{ A}ΔImax=20%×Io=0.2×2=0.4 A
下面推导电流纹波的表达式。
在单极性 SPWM 模式下,以正半周某一时刻为例,设此时输出正弦波的瞬时值为 VoV_oVo(注意这里 VoV_oVo 代表瞬时值,而非有效值)。桥臂输出在 +Udc+U_{dc}+Udc 和 000 之间切换。在一个开关周期 Ts=1/FsT_s = 1/F_sTs=1/Fs 中:
导通阶段 (Q1、Q3 导通,持续时间 tont_{on}ton):桥臂输出 +Udc+U_{dc}+Udc,电感左端电位高于右端,电感两端电压为:
UL=Udc−Vo>0U_L = U_{dc} - V_o > 0UL=Udc−Vo>0
该正电压使电感电流线性上升,上升量为:
ΔIrise=ULL⋅ton=(Udc−Vo)⋅tonL\Delta I_{rise} = \frac{U_L}{L} \cdot t_{on} = \frac{(U_{dc} - V_o) \cdot t_{on}}{L}ΔIrise=LUL⋅ton=L(Udc−Vo)⋅ton
续流阶段 (Q1 关断,电流经体二极管续流,持续时间 tofft_{off}toff):桥臂输出为 000,电感两端电压为:
UL=0−Vo=−Vo<0U_L = 0 - V_o = -V_o < 0UL=0−Vo=−Vo<0
该负电压使电感电流线性下降。
在稳态下,一个开关周期内电感电流的上升量等于下降量(伏秒平衡),由此可以推导占空比与输出电压的关系:
(Udc−Vo)⋅ton=Vo⋅toff(U_{dc} - V_o) \cdot t_{on} = V_o \cdot t_{off}(Udc−Vo)⋅ton=Vo⋅toff
其中 ton+toff=Tst_{on} + t_{off} = T_ston+toff=Ts,定义占空比 D=ton/TsD = t_{on} / T_sD=ton/Ts,则 toff=(1−D)⋅Tst_{off} = (1 - D) \cdot T_stoff=(1−D)⋅Ts。代入上式:
(Udc−Vo)⋅D⋅Ts=Vo⋅(1−D)⋅Ts(U_{dc} - V_o) \cdot D \cdot T_s = V_o \cdot (1 - D) \cdot T_s(Udc−Vo)⋅D⋅Ts=Vo⋅(1−D)⋅Ts
两边消去 TsT_sTs,展开:
Udc⋅D−Vo⋅D=Vo−Vo⋅DU_{dc} \cdot D - V_o \cdot D = V_o - V_o \cdot DUdc⋅D−Vo⋅D=Vo−Vo⋅D
两边的 −Vo⋅D-V_o \cdot D−Vo⋅D 消去:
Udc⋅D=VoU_{dc} \cdot D = V_oUdc⋅D=Vo
解得:
D=VoUdc\boxed{D = \frac{V_o}{U_{dc}}}D=UdcVo
这就是单极性 SPWM 的占空比公式,形式非常简洁。当 Vo=0V_o = 0Vo=0 时 D=0D = 0D=0,当 Vo=UdcV_o = U_{dc}Vo=Udc 时 D=1D = 1D=1,符合物理直觉。
将 ton=D⋅Ts=D/Fst_{on} = D \cdot T_s = D / F_ston=D⋅Ts=D/Fs 代入电流上升量的表达式,得到每个开关周期的电流纹波峰峰值:
ΔI=(Udc−Vo)⋅tonL=(Udc−Vo)⋅DL⋅Fs\Delta I = \frac{(U_{dc} - V_o) \cdot t_{on}}{L} = \frac{(U_{dc} - V_o) \cdot D}{L \cdot F_s}ΔI=L(Udc−Vo)⋅ton=L⋅Fs(Udc−Vo)⋅D
再将 D=Vo/UdcD = V_o / U_{dc}D=Vo/Udc 代入:
ΔI=(Udc−Vo)⋅VoL⋅Fs⋅Udc\boxed{\Delta I = \frac{(U_{dc} - V_o) \cdot V_o}{L \cdot F_s \cdot U_{dc}}}ΔI=L⋅Fs⋅Udc(Udc−Vo)⋅Vo
可以看到,ΔI\Delta IΔI 是关于 VoV_oVo 的二次函数(开口朝下的抛物线),在 Vo=0V_o = 0Vo=0 和 Vo=UdcV_o = U_{dc}Vo=Udc 时均为零,在中间某处取得最大值。
为求最大纹波点,对 VoV_oVo 求导并令其为零。设 x=Vox = V_ox=Vo,则 ΔI(x)=(Udc⋅x−x2)/(L⋅Fs⋅Udc)\Delta I(x) = (U_{dc} \cdot x - x^2) / (L \cdot F_s \cdot U_{dc})ΔI(x)=(Udc⋅x−x2)/(L⋅Fs⋅Udc):
d(ΔI)dx=Udc−2xL⋅Fs⋅Udc=0\frac{d(\Delta I)}{dx} = \frac{U_{dc} - 2x}{L \cdot F_s \cdot U_{dc}} = 0dxd(ΔI)=L⋅Fs⋅UdcUdc−2x=0
解得:
x=Udc2,即Vo=Udc2x = \frac{U_{dc}}{2},即 \quad V_o = \frac{U_{dc}}{2}x=2Udc,即Vo=2Udc
即当瞬时输出电压等于母线电压的一半时(占空比 D=0.5D = 0.5D=0.5),电流纹波取最大值。
将 Vo=Udc/2V_o = U_{dc}/2Vo=Udc/2 代入纹波公式:
ΔImax=(Udc−Udc/2)⋅Udc/2L⋅Fs⋅Udc=Udc/2⋅Udc/2L⋅Fs⋅Udc=Udc4L⋅Fs\Delta I_{\max} = \frac{(U_{dc} - U_{dc}/2) \cdot U_{dc}/2}{L \cdot F_s \cdot U_{dc}} = \frac{U_{dc}/2 \cdot U_{dc}/2}{L \cdot F_s \cdot U_{dc}} = \frac{U_{dc}}{4 L \cdot F_s}ΔImax=L⋅Fs⋅Udc(Udc−Udc/2)⋅Udc/2=L⋅Fs⋅UdcUdc/2⋅Udc/2=4L⋅FsUdc
令 ΔImax=0.4 A\Delta I_{\max} = 0.4\text{ A}ΔImax=0.4 A,解出 LLL 的下限:
Lmin=Udc4⋅ΔImax⋅FsL_{\min} = \frac{U_{dc}}{4 \cdot \Delta I_{\max} \cdot F_s}Lmin=4⋅ΔImax⋅FsUdc
代入 Udc=45 VU_{dc} = 45\text{ V}Udc=45 V,Fs=50 kHzF_s = 50\text{ kHz}Fs=50 kHz:
Lmin=454×0.4×50000=4580000=562.5 μHL_{\min} = \frac{45}{4 \times 0.4 \times 50000} = \frac{45}{80000} = 562.5\text{ μH}Lmin=4×0.4×5000045=8000045=562.5 μH
✅ 最终选型:600 μH 高频功率电感(562.5 μH ~ 1910 μH,靠近下限取整留裕量)
滤波电容 C 的计算
电容的取值同样受上限和下限两个约束。
约束一(上限):无功电流不能太大
电容接在交流输出侧,会在 50Hz 基波频率下产生无功电流(即容性无功电流,只在电容中流动,不传递有效功率)。这部分电流占用了逆变器的电流输出能力,必须加以限制。工程上要求无功电流不超过额定电流的 3%。
电容产生的无功电流等于输出电压除以容抗:
IC=VoXC=Vo⋅2πf⋅CI_C = \frac{V_o}{X_C} = V_o \cdot 2\pi f \cdot CIC=XCVo=Vo⋅2πf⋅C
令其不超过额定电流的 3%:
Vo⋅2πf⋅C≤3%×IoV_o \cdot 2\pi f \cdot C \leq 3\% \times I_oVo⋅2πf⋅C≤3%×Io
解出 CCC:
C≤0.03×Io2πf⋅VoC \leq \frac{0.03 \times I_o}{2\pi f \cdot V_o}C≤2πf⋅Vo0.03×Io
代入 Io=2 AI_o = 2\text{ A}Io=2 A,f=50 Hzf = 50\text{ Hz}f=50 Hz,Vo=24 VV_o = 24\text{ V}Vo=24 V:
Cmax=0.03×22π×50×24=0.067539.8≈7.96 μFC_{\max} = \frac{0.03 \times 2}{2\pi \times 50 \times 24} = \frac{0.06}{7539.8} \approx 7.96\text{ μF}Cmax=2π×50×240.03×2=7539.80.06≈7.96 μF
约束二(下限):截止频率要足够低
LC 滤波器的作用是保留 50Hz 基波、滤除 50kHz 开关谐波。要让滤波器有效工作,其谐振频率(即截止频率 fcf_cfc)必须远低于开关频率 FsF_sFs。工程上通常取:
fc≤Fs10f_c \leq \frac{F_s}{10}fc≤10Fs
即 fc≤50000/10=5000 Hzf_c \leq 50000 / 10 = 5000\text{ Hz}fc≤50000/10=5000 Hz。
LC 谐振频率公式为:
fc=12πLCf_c = \frac{1}{2\pi \sqrt{LC}}fc=2πLC 1
将该式两边平方,解出 CCC:
C=1(2πfc)2⋅LC = \frac{1}{(2\pi f_c)^2 \cdot L}C=(2πfc)2⋅L1
代入 fc=5000 Hzf_c = 5000\text{ Hz}fc=5000 Hz,L=600 μH=6×10−4 HL = 600\text{ μH} = 6 \times 10^{-4}\text{ H}L=600 μH=6×10−4 H:
(2π×5000)2=(31416)2≈9.87×108(2\pi \times 5000)^2 = (31416)^2 \approx 9.87 \times 10^{8}(2π×5000)2=(31416)2≈9.87×108
Cmin=19.87×108×6×10−4=15.92×105≈1.69 μFC_{\min} = \frac{1}{9.87 \times 10^{8} \times 6 \times 10^{-4}} = \frac{1}{5.92 \times 10^{5}} \approx 1.69\text{ μF}Cmin=9.87×108×6×10−41=5.92×1051≈1.69 μF
验证:fc=1/(2π6×10−4×1.69×10−6)=1/(2π×3.18×10−5)≈5005 Hzf_c = 1 / (2\pi\sqrt{6 \times 10^{-4} \times 1.69 \times 10^{-6}}) = 1 / (2\pi \times 3.18 \times 10^{-5}) \approx 5005\text{ Hz}fc=1/(2π6×10−4×1.69×10−6 )=1/(2π×3.18×10−5)≈5005 Hz,符合要求。
✅ 最终选型:3 μF CBB 薄膜电容(1.69 μF ~ 7.96 μF,居中取值)
为何选薄膜电容而非电解电容?
CBB 薄膜电容在高频下等效串联电阻(ESR)极低,损耗小;且无极性限制,可直接用于交流侧。电解电容 ESR 大、高频特性差,不适合此处。
2.3 直流母线电容
为什么需要母线电容?
单相逆变器的输出电压和电流都是 50Hz 正弦波。将两者相乘,可以得到输出瞬时功率:
p(t)=v(t)⋅i(t)=Vmsin(ωt)⋅Imsin(ωt)p(t) = v(t) \cdot i(t) = V_m \sin(\omega t) \cdot I_m \sin(\omega t)p(t)=v(t)⋅i(t)=Vmsin(ωt)⋅Imsin(ωt)
利用三角恒等式 sin2θ=12(1−cos2θ)\sin^2\theta = \frac{1}{2}(1 - \cos 2\theta)sin2θ=21(1−cos2θ),展开得:
p(t)=VmIm⋅sin2(ωt)=VmIm21−cos(2ωt)p(t) = V_m I_m \cdot \sin^2(\omega t) = \frac{V_m I_m}{2}\big1 - \\cos(2\\omega t)\\bigp(t)=VmIm⋅sin2(ωt)=2VmIm1−cos(2ωt)
可以将其拆分为两项:
p(t)=VmIm2⏟恒定平均功率 Po−VmIm2cos(2ωt)⏟100Hz 脉动分量p(t) = \underbrace{\frac{V_m I_m}{2}}{\text{恒定平均功率 } P_o} - \underbrace{\frac{V_m I_m}{2}\cos(2\omega t)}{\text{100Hz 脉动分量}}p(t)=恒定平均功率 Po 2VmIm−100Hz 脉动分量 2VmImcos(2ωt)
第二项是一个以 2ω2\omega2ω(即 2×2π×50=100 Hz2 \times 2\pi \times 50 = 100\text{ Hz}2×2π×50=100 Hz)频率波动的交变功率------这是正弦波相乘后频率翻倍的数学结果,与电路结构无关,是单相逆变器的固有特性。
而输入直流侧只能提供恒定功率,无法跟随这个 100Hz 的波动。两者之间的差值必须由母线电容来"填平":功率过剩时电容充电储能,功率不足时放电补充,从而稳定母线电压。若电容不足,母线电压会出现明显的 100Hz 纹波,进而影响输出波形质量。
容值推导:
设输出有功功率为 PoP_oPo,母线电压为 VdcV_{dc}Vdc,允许的母线电压纹波峰峰值为 ΔVdc\Delta V_{dc}ΔVdc。
第一步:计算每个脉动周期需要缓冲的能量。
100Hz 脉动功率的振幅为 PoP_oPo,角频率为 2ω2\omega2ω(ω=2π×50=314 rad/s\omega = 2\pi \times 50 = 314\text{ rad/s}ω=2π×50=314 rad/s)。在每半个脉动周期内(即 T/2=1/(2×100)=5 msT/2 = 1/(2 \times 100) = 5\text{ ms}T/2=1/(2×100)=5 ms),电容需要吸收或释放的能量为脉动功率对时间的积分:
ΔW=∫0T/2Po⋅∣cos(2ωt)∣ dt\Delta W = \int_0^{T/2} P_o \cdot |\cos(2\omega t)| \, dtΔW=∫0T/2Po⋅∣cos(2ωt)∣dt
由于 ∫0π/(2ω)cos(2ωt) dt=12ωsin(2ωt)∣0π/(2ω)=12ω\int_0^{\pi/(2\omega)} \cos(2\omega t) \, dt = \frac{1}{2\omega}\sin(2\omega t)\Big|_0^{\pi/(2\omega)} = \frac{1}{2\omega}∫0π/(2ω)cos(2ωt)dt=2ω1sin(2ωt) 0π/(2ω)=2ω1,因此:
ΔW=Po2ω\Delta W = \frac{P_o}{2\omega}ΔW=2ωPo
第二步:将缓冲能量等于电容的充放电能量。
电容在电压变化 ΔVdc\Delta V_{dc}ΔVdc 时释放(或吸收)的能量为:
ΔW=Cdc⋅Vdc⋅ΔVdc\Delta W = C_{dc} \cdot V_{dc} \cdot \Delta V_{dc}ΔW=Cdc⋅Vdc⋅ΔVdc
这里使用了近似:12C(V12−V22)=12C(V1+V2)(V1−V2)≈C⋅Vdc⋅ΔVdc\frac{1}{2}C(V_1^2 - V_2^2) = \frac{1}{2}C(V_1+V_2)(V_1-V_2) \approx C \cdot V_{dc} \cdot \Delta V_{dc}21C(V12−V22)=21C(V1+V2)(V1−V2)≈C⋅Vdc⋅ΔVdc,其中 VdcV_{dc}Vdc 为平均电压,ΔVdc\Delta V_{dc}ΔVdc 为纹波峰峰值。该近似在 ΔVdc≪Vdc\Delta V_{dc} \ll V_{dc}ΔVdc≪Vdc 时成立。
第三步:联立求解。
令两个表达式相等:
Cdc⋅Vdc⋅ΔVdc=Po2ωC_{dc} \cdot V_{dc} \cdot \Delta V_{dc} = \frac{P_o}{2\omega}Cdc⋅Vdc⋅ΔVdc=2ωPo
解出:
Cdc=Po2ω⋅Vdc⋅ΔVdcC_{dc} = \frac{P_o}{2\omega \cdot V_{dc} \cdot \Delta V_{dc}}Cdc=2ω⋅Vdc⋅ΔVdcPo
代入具体数值。输出有功功率 Po=Vo×Io=24×2=48 WP_o = V_o \times I_o = 24 \times 2 = 48\text{ W}Po=Vo×Io=24×2=48 W,母线电压 Vdc=45 VV_{dc} = 45\text{ V}Vdc=45 V,允许纹波 ΔVdc=2 V\Delta V_{dc} = 2\text{ V}ΔVdc=2 V,ω=314 rad/s\omega = 314\text{ rad/s}ω=314 rad/s:
Cdc=482×314×45×2=4856520≈849 μFC_{dc} = \frac{48}{2 \times 314 \times 45 \times 2} = \frac{48}{56520} \approx 849\text{ μF}Cdc=2×314×45×248=5652048≈849 μF
✅ 最终选型:两颗 470 μF / 100V 电解电容并联,总容量 940 μF
电容耐压选 100V,约为母线电压 45V 的 2.2 倍,可覆盖上电浪涌与输入波动。
2.4 隔离驱动电路
单片机 I/O 口电压通常为 3.3V 或 5V,而功率桥臂工作在 45V 母线电压下。若不做隔离,功率侧一旦发生异常,高压会直接损坏单片机。因此必须在单片机与功率管之间加入隔离驱动器,将强弱电路在电气上完全分开。驱动器同时还需提供足够的栅极驱动电流,保证 MOSFET 快速开通与关断。
常用隔离驱动芯片:
| 芯片型号 | 隔离方式 | 通道 | 峰值驱动电流 | 备注 |
|---|---|---|---|---|
| UCC21520 | 电容隔离 | 2(半桥) | ±4A | 通用性强,性价比高 |
| Si8271 | 电容隔离 | 1 | ±2.5A | 单管驱动,布局灵活 |
| HCPL-314J | 光耦隔离 | 2(半桥) | ±2.5A | 抗干扰强,适合工业场合 |
| ISO5452 | 电容隔离 | 2(半桥) | ±4A | TI 高可靠性方案 |
⚠️ 死区时间(Dead Time)
同一桥臂的上下两个开关管绝对不能同时导通,否则直流母线被直接短路(称为"直通"),功率管会在极短时间内因过流烧毁。
死区时间是指上管关断到下管导通之间强制插入的空白延迟,留出足够时间让已关断的管子彻底截止。死区时间有两种设置方式:
- 硬件方式:通过驱动芯片的专用引脚外接电阻设定,简单可靠
- 软件方式:在单片机 PWM 模块的死区寄存器中配置,调试灵活
调试初期建议优先采用硬件方式,避免因软件配置失误导致直通炸机。
小结
本讲以 24V 单相逆变开发板为例,系统梳理了硬件主电路的核心知识点:
- H 桥工作原理:两组对角开关管交替导通,驱动电流在负载上正反向交替流动
- SPWM 调制原理:面积等效将脉冲序列逼近正弦波,LC 滤波器滤除高频谐波还原正弦输出
- LC 滤波器参数:电感由基波压降(上限)与电流纹波(下限)约束确定范围;电容由无功电流(上限)与截止频率(下限)约束确定范围
- 母线电容:单相逆变固有的 100Hz 脉动功率由母线电容吸收,基于能量守恒定量计算容值
- 驱动电路:隔离驱动器隔离强弱电,死区时间防止桥臂直通
下一讲预告: 聚焦软件控制,对比单极性与双极性 SPWM 调制策略的优劣,并结合 STM32 讲解高精度 PWM 发波的实现方法,敬请期待!