一、引言
MPU6050 集成三轴加速度计 + 三轴陀螺仪,广泛用于可穿戴设备、人体状态监测、跌倒报警等场景。博主大学也是经常使用这个模块,属于是能比较便宜的了,几块钱,不过也有一些国产芯片冒充就是了。最近买了几个十轴姿态传感器,等有空我们来整一下十轴的。
写这篇博文也主要是做一个记录吧,把手头已有的模块都驱动一下,也算给后面项目的合成提前做好准备,这个模块可以做一些大学常见的课题,比如老人健康检测系统、宠物检测系统等。
如果有开发需求的可以找我哈。
本文基于 STM32 HAL 库 实现 MPU6050 原始数据读取、姿态角解算,并从零实现运动状态识别(静止 / 行走 / 跑步)与四阶段摔倒检测算法。同时结合实际调试日志,复盘「检测不到摔倒、失重失效、状态机卡死」等问题的定位与解决过程,代码只保留核心片段,方便直接移植到项目中。
工程的基本框架包括DMP的移植借鉴了部分原子哥的代码,主打一个能用就行。
二、硬件与软件环境
2.1 硬件平台
- 主控:STM32F103/F407(HAL 库通用)
- 传感器:MPU6050 六轴传感器
- 通信方式:I2C
- 功能:姿态解算、运动状态识别、摔倒检测
2.2 软件环境
- 开发工具:STM32CubeMX + Keil MDK
- 库版本:STM32 HAL 库
- 算法:加速度计姿态解算、合加速度计算、有限状态机(FSM)摔倒判定
三、MPU6050 核心驱动(STM32 HAL 版)
3.1 I2C 底层驱动(核心适配)
MPU6050 依赖 I2C 进行寄存器读写,以下是适配 HAL 库的核心读写函数,无冗余代码,可直接
// MPU6050 I2C 地址
#define MPU6050_ADDR 0x68
// 写寄存器
int MPU6050_WriteReg(uint8_t reg, uint8_t data)
{
return HAL_I2C_Mem_Write(&hi2c1, MPU6050_ADDR<<1, reg,
I2C_MEMADD_SIZE_8BIT, &data, 1, 100);
}
// 读寄存器
int MPU6050_ReadReg(uint8_t reg, uint8_t *data)
{
return HAL_I2C_Mem_Read(&hi2c1, MPU6050_ADDR<<1, reg,
I2C_MEMADD_SIZE_8BIT, data, 1, 100);
}
// 连续读数据
int MPU6050_ReadData(uint8_t reg, uint8_t len, uint8_t *buf)
{
return HAL_I2C_Mem_Read(&hi2c1, MPU6050_ADDR<<1, reg,
I2C_MEMADD_SIZE_8BIT, buf, len, 100);
}3.2 MPU6050 初始化
MPU6050 上电默认休眠,必须唤醒并配置量程:
uint8_t MPU6050_Init(void)
{
uint8_t id = 0;
MPU6050_ReadReg(0x75, &id); // 读ID寄存器
if(id != 0x68) return 1; // ID校验失败
MPU6050_WriteReg(0x6B, 0x00); // 唤醒传感器
MPU6050_WriteReg(0x1C, 0x00); // 加速度量程±2g
MPU6050_WriteReg(0x1B, 0x00); // 陀螺仪量程±250°/s
return 0;
}3.3 原始数据读取与合加速度计算
人体状态检测核心是合加速度(三轴加速度矢量模值),静止时约等于 1g,失重时<1g,撞击时>2g:
// 读取三轴加速度原始数据
void MPU6050_ReadAccel(int16_t *ax, int16_t *ay, int16_t *az)
{
uint8_t buf[6];
MPU6050_ReadData(0x3B, 6, buf);
*ax = (int16_t)(buf[0]<<8 | buf[1]);
*ay = (int16_t)(buf[2]<<8 | buf[3]);
*az = (int16_t)(buf[4]<<8 | buf[5]);
}
// 计算合加速度(单位:g)
float MPU6050_GetAccelNorm(void)
{
int16_t ax, ay, az;
MPU6050_ReadAccel(&ax, &ay, &az);
float fx = ax / 16384.0f; // ±2g 量程换算
float fy = ay / 16384.0f;
float fz = az / 16384.0f;
return sqrt(fx*fx + fy*fy + fz*fz);
}3.4 姿态角解算(Pitch/Roll)
摔倒判定依赖姿态角,使用加速度计计算俯仰角 / 横滚角:
void MPU6050_GetPitchRoll(float *pitch, float *roll)
{
int16_t ax, ay, az;
MPU6050_ReadAccel(&ax, &ay, &az);
*roll = atan2(ay, az) * 180.0f / PI;
*pitch = atan2(-ax, sqrt(ay*ay + az*az)) * 180.0f / PI;
}四、应用层核心算法
4.1 数据结构定义
统一管理人体状态信息:
// 运动状态枚举
typedef enum
{
BODY_STATIC = 0, // 静止
BODY_WALK = 1, // 行走
BODY_RUN = 2, // 跑步
BODY_FALL = 3 // 摔倒
}BodyStatus_TypeDef;
// 摔倒状态机阶段
typedef enum
{
FALL_STAGE_NORMAL = 0, // 正常状态
FALL_STAGE_WEIGHTLESS = 1, // 失重状态
FALL_STAGE_IMPACT = 2, // 撞击状态
FALL_STAGE_STATIC_CHECK = 3 // 静止确认
}FallStage_TypeDef;
// 人体信息结构体
typedef struct
{
float pitch; // 俯仰角
float roll; // 横滚角
float accel_norm; // 合加速度
BodyStatus_TypeDef status; // 当前状态
}BodyInfo_TypeDef;
BodyInfo_TypeDef body_info;4.2 运动状态识别(静止 / 行走 / 跑步)
通过合加速度区间直接划分,简单高效:
// 阈值定义
#define ACCEL_STATIC_MAX 1.1f // 静止上限
#define ACCEL_WALK_MAX 1.8f // 行走上限
void BodyStatus_Detect(void)
{
float accel = body_info.accel_norm;
if(accel < ACCEL_STATIC_MAX)
body_info.status = BODY_STATIC;
else if(accel < ACCEL_WALK_MAX)
body_info.status = BODY_WALK;
else
body_info.status = BODY_RUN;
}4.3 四阶段摔倒检测(核心算法)
采用工业级四阶段状态机 ,避免误触发,逻辑:正常 → 失重 → 撞击 → 姿态异常静止确认 → 摔倒
// 摔倒判定阈值
#define GRAVITY_MIN 0.7f // 失重阈值
#define GRAVITY_IMPACT 2.0f // 撞击阈值
#define FALL_ANGLE_THRESH 45.0f // 姿态异常角度
#define FALL_FILTER_FRAME 3 // 滤波帧数
#define STATIC_CHECK_MS 1000 // 静止确认时间
// 全局状态变量
FallStage_TypeDef fall_stage = FALL_STAGE_NORMAL;
uint16_t weightless_cnt = 0;
uint16_t impact_cnt = 0;
uint32_t static_start_time = 0;
float last_accel_norm = 0;
void BodyStatus_Judge(void)
{
uint32_t now = HAL_GetTick();
float accel = body_info.accel_norm;
uint8_t is_angle_bad = (fabs(body_info.pitch) > FALL_ANGLE_THRESH) ||
(fabs(body_info.roll) > FALL_ANGLE_THRESH);
switch(fall_stage)
{
case FALL_STAGE_NORMAL:
BodyStatus_Detect(); // 识别静/走/跑
// 失重检测
if(accel < GRAVITY_MIN)
{
weightless_cnt++;
if(weightless_cnt >= FALL_FILTER_FRAME)
{
fall_stage = FALL_STAGE_WEIGHTLESS;
weightless_cnt = 0;
}
}
else weightless_cnt = 0;
break;
case FALL_STAGE_WEIGHTLESS:
// 撞击检测
if(accel > GRAVITY_IMPACT)
{
impact_cnt++;
if(impact_cnt >= FALL_FILTER_FRAME)
{
fall_stage = FALL_STAGE_IMPACT;
impact_cnt = 0;
}
}
break;
case FALL_STAGE_IMPACT:
// 姿态异常检查
if(is_angle_bad)
{
static_start_time = now;
fall_stage = FALL_STAGE_STATIC_CHECK;
}
else fall_stage = FALL_STAGE_NORMAL;
break;
case FALL_STAGE_STATIC_CHECK:
// 静止确认:姿态异常+加速度稳定1g
if(is_angle_bad && (accel >= 0.9f && accel <= 1.1f))
{
if(now - static_start_time >= STATIC_CHECK_MS)
{
body_info.status = BODY_FALL;
}
}
else
{
fall_stage = FALL_STAGE_NORMAL;
body_info.status = BODY_STATIC;
}
break;
}
// 起身恢复:角度正常则退出摔倒
if(body_info.status == BODY_FALL && !is_angle_bad)
{
body_info.status = BODY_STATIC;
fall_stage = FALL_STAGE_NORMAL;
}
}五、调试问题定位与解决(实战踩坑)
结合实际调试日志,复盘最容易踩的 3 个坑:
5.1 问题一:完全检测不到摔倒,状态机卡死
现象 :模拟摔倒时,状态始终停留在 NORMAL,无法进入失重阶段。原因:
GRAVITY_MIN阈值设置过小(如 0.2g),实际摔倒失重达不到;- 全局变量未初始化,状态机乱跳;
- 加速度未正确换算,数值异常。
解决:
- 阈值调整为
0.7f,适配人体摔倒真实失重幅度; - 开机强制初始化全局状态变量;
- 确认加速度量程换算正确(±2g 用 16384)。
5.2 问题二:能进入失重 / 撞击,但不判定摔倒
现象 :状态走到 STATIC_CHECK,但始终不输出 FALL。原因:
- 姿态角阈值过大,倒地后不触发
is_angle_bad; - 静止确认时间过长,调试时未等待足够时长;
- 加速度抖动,不在 0.9~1.1g 区间。
解决:
- 角度阈值设为 45°,人体倒地必然触发;
- 调试时保持姿态异常静止 1 秒以上;
- 对合加速度做简单滑动滤波。
5.3 问题三:摔倒后无法自动恢复
现象 :判定摔倒后,起身姿态正常,仍锁定摔倒状态。原因:起身恢复逻辑位置错误,未在主循环生效。
解决:将起身恢复逻辑放在状态机外部,每次调用都执行判断。
六、主循环调用逻辑
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_I2C1_Init();
MX_USART1_UART_Init();
MPU6050_Init(); // 传感器初始化
body_info.status = BODY_STATIC;
while(1)
{
// 更新姿态与加速度
MPU6050_GetPitchRoll(&body_info.pitch, &body_info.roll);
body_info.accel_norm = MPU6050_GetAccelNorm();
// 状态与摔倒判定
BodyStatus_Judge();
// 串口打印调试
printf("状态:%d | accel:%.2f | 姿态异常:%d\r\n",
fall_stage, body_info.accel_norm,
(fabs(body_info.pitch)>45||fabs(body_info.roll)>45));
HAL_Delay(50);
}
}七、测试效果
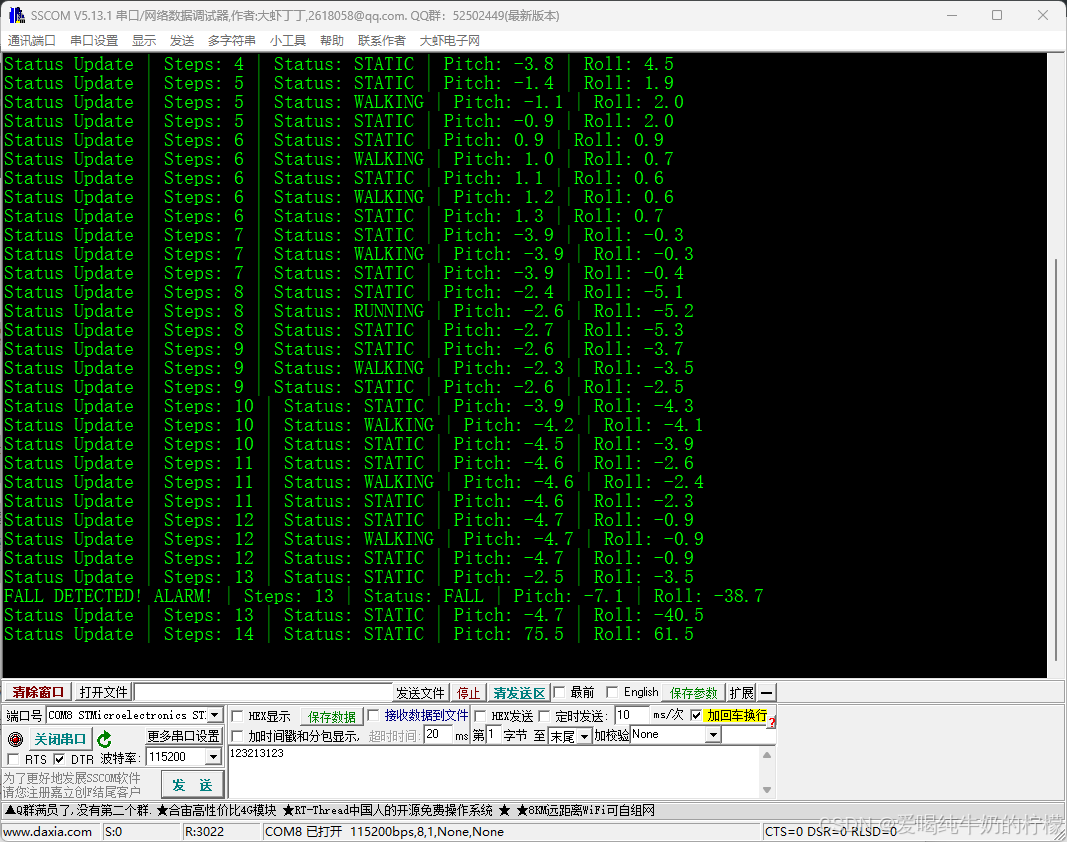
姿态恢复后可自动退出摔倒状态,无卡死、无误判。
其实结果还算是准确吧,毕竟6轴,作为课设毕设使用完全足够,能说名问题。
有测试代码需要的朋友可以后台联系博主哈。