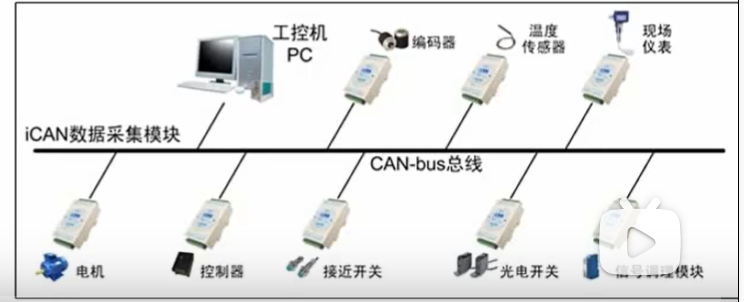
1.CAN通讯介绍
CAN(Controller Area Network控制器局域网,简称CAN或CAN bus)是一种丰富的车用总线 标准。
设计用于不需要主机的情况下,允许网络上的单片机和仪器相互通信。
它基于消息传递协议 ,设计之初在车辆上复用通用线缆,以降低铜线使用量,后来也被其他行业所使用。
CAN拥有良好的弹性调整能力,可以在现有网络中增加节点而不用在软硬件中做出调整。
2.物理层
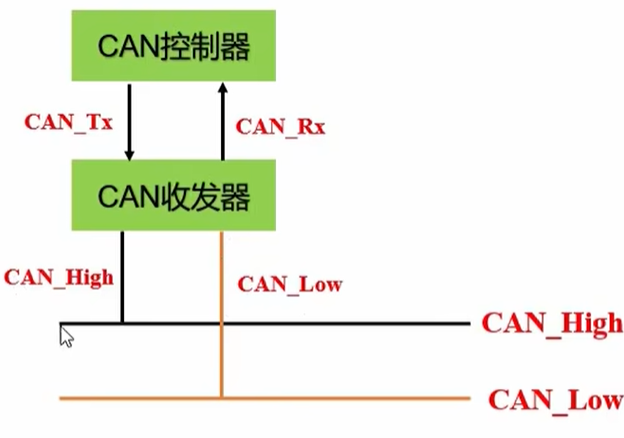
2.1.CAN网络节点
-
一个CAN控制器
- 核心功能 :它负责 CAN 报文的发送与接收控制,完成总线显性 / 隐性电平解析、帧结构处理、数据校验、位时序控制及总线仲裁等功能,并通过 CAN_Tx/CAN_Rx 引脚与外部收发器交互,将逻辑电平信号转换为总线差分信号。
- 隐性电平:总线无驱动,差分电压接近 0,对应逻辑 1
- 显性电平:总线被主动驱动,存在明显差分电压,对应逻辑 0
- 位置:通常集成在 MCU 内部,是 CAN 通信的协议处理核心。
- 核心功能 :它负责 CAN 报文的发送与接收控制,完成总线显性 / 隐性电平解析、帧结构处理、数据校验、位时序控制及总线仲裁等功能,并通过 CAN_Tx/CAN_Rx 引脚与外部收发器交互,将逻辑电平信号转换为总线差分信号。
-
一个CAN收发器
- 核心功能:实现逻辑电平 ↔ 总线差分电平转换,将 CAN 控制器的 TTL 逻辑信号转为 CAN_H/CAN_L 差分信号,同时提供总线驱动、抗干扰与隔离保护。
- 位置:位于控制器与物理总线之间,属于外部接口芯片。我开发用的是PD1050收发器芯片。
-
STM32 特性:片内集成 CAN 控制器,无需外接协议芯片,仅需外接 CAN 收发器。
-
CAN控制器和CAN收发器之间通过CAN_Tx和CAN_Rx信号线相连接。
-
CAN收发器和CAN总线之间使用CAN_High、CAN_Low信号线相连
2.2.CAN网络节点发数据流程
- MCU 内部的 CAN 控制器准备好二进制数据。
- 控制器通过 CAN_Tx 线,把逻辑电平信号发给收发器。
- 收发器将逻辑电平转换为差分电平 :
- 逻辑 0 → 显性电平(CAN_H 拉高、CAN_L 拉低,差分电压大)
- 逻辑 1 → 隐性电平(CAN_H 和 CAN_L 电压接近,差分电压≈0)
- 差分信号通过 CAN_H/CAN_L 输出到 CAN 总线上,被其他节点接收。
2.3.CAN网络节点接收数据流程
通过收发器接收总线上的数据到控制器上时,则是与发送数据流程相反。
- 收发器把总线上收到的CAN_High和CAN_Low信号转换成普通的逻辑电平信号。
- 通过CAN_RX输出到控制器中。
2.4.CAN总线网络
2.4.1.CAN总线网络介绍
当CAN线上接入多个设备时,就构成了CAN总线网络。
根据接法不同,总线网络分闭环总线网络 、开环总线网络 2种。
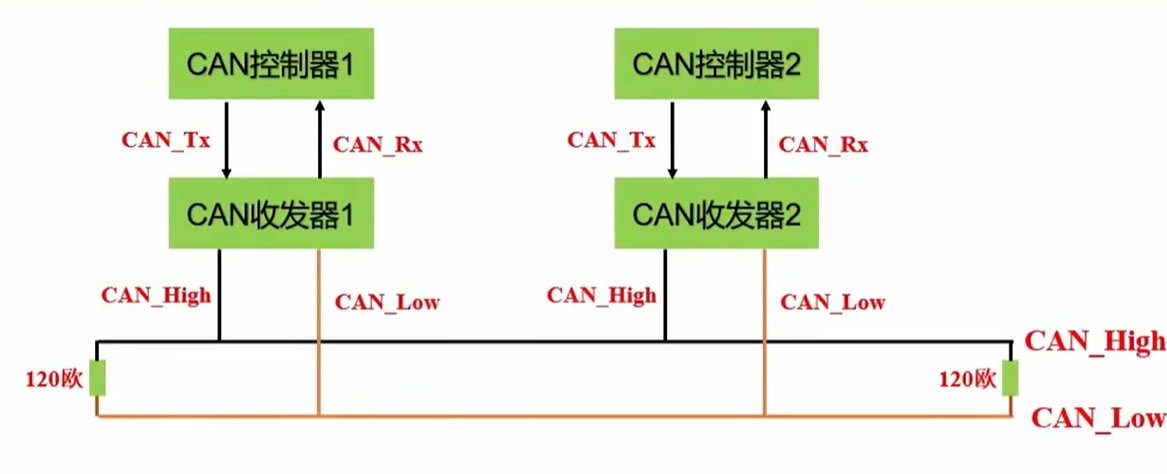
2.4.2.闭环总线网络
闭环总线网络: CAN总线上CAN_High和CAN_Low两端通过120欧电阻连接形成闭合回路,这样的CAN总线网络就称闭环总线网络。
协议标准:遵循 ISO11898 高速 CAN 标准,最高通信速率 1 Mbps,对应最大传输距离约 40 m。
不同CAN协议标准对比如下表。
| 协议类型 | 最高速率 | 典型传输距离 | 说明 |
|---|---|---|---|
| ISO 11898-2(高速 CAN) | 1 Mbps | 约 40 m | 传统车载、工业主流,应用最广泛 |
| CAN FD | 5~10 Mbps | 数米 | 数据段提速,短距离高速场景使用 |
| CAN XL | 20~50 Mbps | 更短距离 | 新一代超高带宽、大数据负载总线 |
闭环总线网络连接如下图所示。
扩展:
CAN FD(ISO 11898-1 扩展):CAN FD 协议在数据段可支持 5 Mbps 高速率(最高甚至 10 Mbps),适合短距离板间或设备间通信,传输距离随速率提升而显著缩短(5 Mbps 时通常仅数米)。CAN XL:CAN FD 协议在数据段可支持 20Mbps 高速率(最高甚至 50 Mbps)
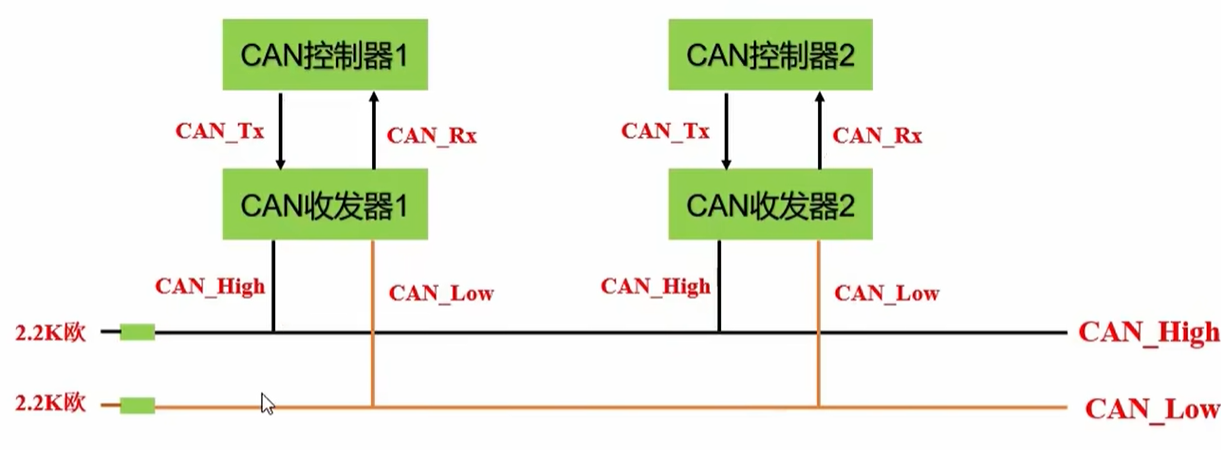
2.4.3.开环总线网络
开环总线网络: CAN总线上CAN_High和CAN_Low左端分别串联一个2.2K欧的电阻,两根总线独立不形成闭环,这样的CAN总线网络就称开环总线网络。
协议标准:遵循 ISO11519-2 标准低速,远距离的"开环网络"。最大传输距离1Km,通信速率最高125Kbps。
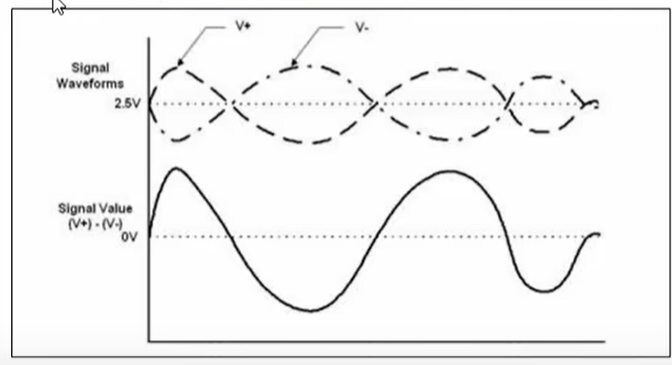
2.5.差分信号
2.5.1.差分信号介绍
CAN_High和CAN_Low走一对差分信号。
传统的单端信号传输:一根信号线一根地线。
差分传输是一种信号传输技术,差分传输在这两个根线上都传输信号,这两个信号的振幅相同,相位相反。
信号接收端比较这两个电压的差值来判断发送端发送的逻辑状态。
在电路板上,差分走线必须是等长、等宽、紧密靠近,且在同一层面的两根线。
2.5.2.差分信号优缺点
- 优点
- 抗干扰能力强:干扰噪声一般会等值、同时的被加载到两根信号线上。而其差值为0,即噪声对信号的逻辑意义不产生影响。
- 能有效抑制电磁干扰(EMI):由于两根信号线靠得很近且信号幅值相等,这两根线与地线之间的耦合电磁场也相等,同时他们的信号极性相反,其电磁将相互抵消。因此对外界和受外界的电磁干扰也小。
- 缺点
- 差分信号一定要走
两根等长、等宽、紧密靠近,且在同一层面的线。对电路板比较小、走线比较紧张的情况下,给布线带来挑战。
- 差分信号一定要走
串口通信协议的演进,也体现出差分传输的优势:
RS232(非差分,两根线)→ RS485(半双工差分,两根线分时收发)→ RS422(全双工差分,收发各一组差分线,共四根)。
差分信号线具有这些优点,在USB协议、485协议、以太网协议及CAN 协议的物理层中,都使用了差分信号传输。
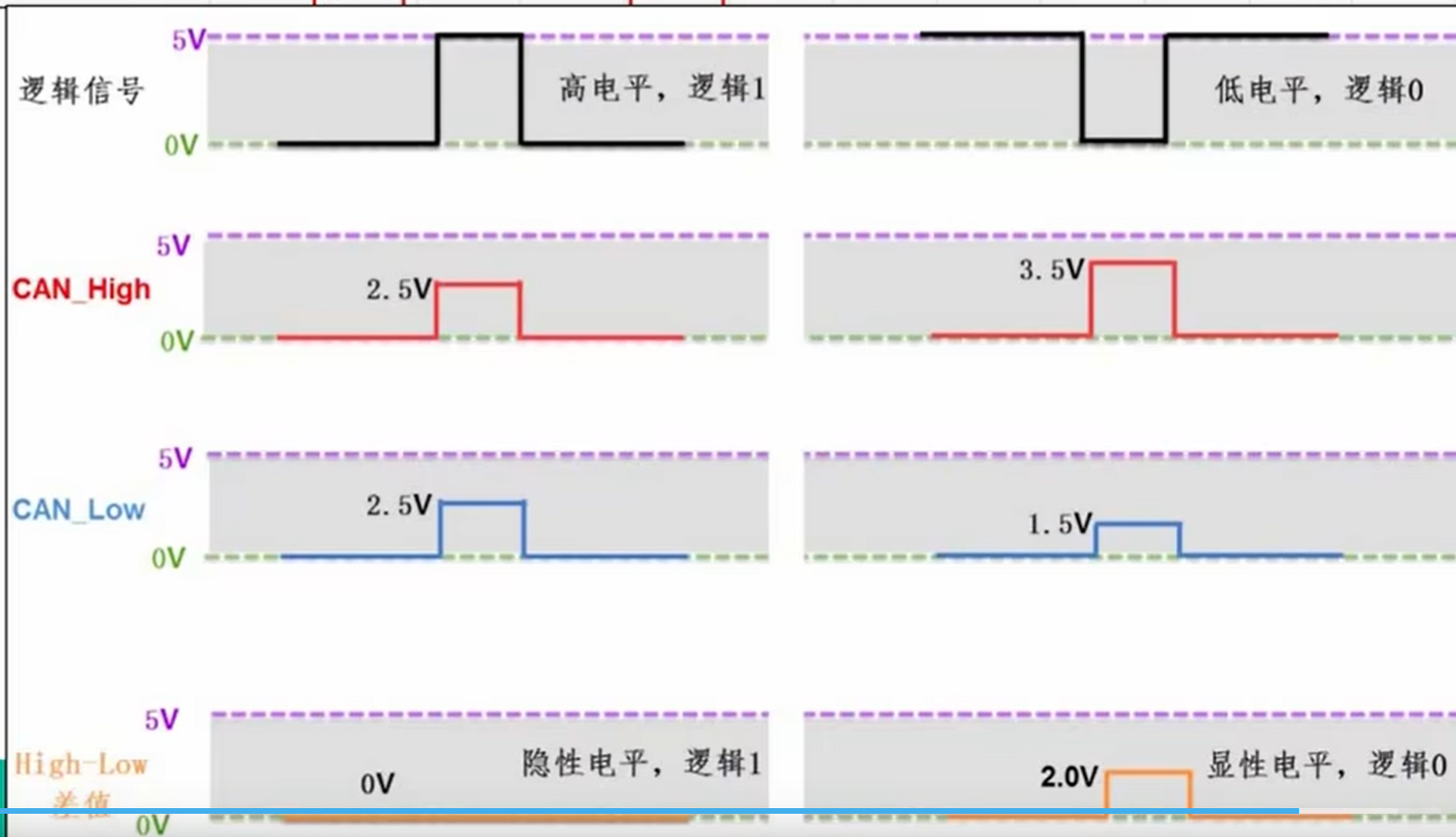
2.5.3.差分信号原理
以 ISO 11898-2 高速 CAN 为例,CAN 总线通过 CAN_High 与 CAN_Low 的电压差值 来传输逻辑 0/1:
- 逻辑1(隐性电平):
- 电平状态:CAN_High = CAN_Low=2.5V
- 电压差:VH-VL=0V
- 物理表现:总线无主动驱动,两根线电压相等,差分电压接近 0。
- 逻辑0(显性电平):
- 电平状态:CAN_High = 3.5V,CAN_Low=1.5V
- 电压差:VH-VL=2V
- 物理表现:总线被主动驱动,CAN_High 拉高、CAN_Low 拉低,形成明显电压差。

CAN 总线之所以是「线与」逻辑,是因为它的电平由所有节点共同决定:只要有一个节点发送显性电平(逻辑 0),总线就表现为显性,等价于所有节点输出做逻辑与运算。这种机制是 CAN 总线实现高效、可靠仲裁的基础。
CAN 线与逻辑的物理本质:显性电平为主动驱动,隐性电平为被动悬浮。
发送逻辑 0 时,节点会通过电流主动将 CAN_H 拉高、CAN_L 拉低,其驱动力远大于被动悬浮状态,因此只要有一个节点输出显性电平,总线就会被强制拉为显性。
3.协议层
3.1.CAN 总线的广播通信机制
CAN总线是广播类型的总线 。
这意味着所有节点都可以侦听到所有传输的报文,无法将报文单独发送给指定节点。
但是CAN硬件能够本地过滤功能,让每个节点对报文选择性地做出响应。每个节点可以通过设置验收滤波器,只对符合 ID 规则的报文进行接收和处理,对无关报文直接忽略。这种 "全网广播 + 本地过滤" 的模式,既保证了数据的共享性,又避免了节点 CPU 资源的浪费。.
3.2.CAN 报文的内容寻址与短帧特性
-
内容寻址而非地址寻址
传统串口、以太网等通信方式,通常在报文中携带明确的目标地址 / 源地址,用于指定收发双方。
而 CAN 报文中不包含任何节点地址,采用内容寻址方式:
-
短报文设计
CAN 总线采用短帧结构传输,报文长度有限,最大实用数据负载为 94 位。
短帧带来的优势非常明显:
3.3.CAN的帧(报文)种类
CAN总线上传输的报文有5种类型(或帧):数据帧、远程帧、错误帧、过载帧和帧间隔。
-
数据帧
数据帧是最常用的报文类型,用于发送单元向接收单元发送数据。
- 携带报文 ID 与 0~8 字节数据;
- 分为标准数据帧(11 位 ID)和扩展数据帧(29 位 ID);
- 所有正常的业务通信都依靠数据帧完成。
-
远程帧
远程帧用于接收单元向具有同样id的发送单元请求发送数据,自身不携带数据段。
- 格式与数据帧类似,但无数据域;
- 某节点发送对应 ID 的远程帧,拥有该 ID 数据的节点会自动回复数据帧;
- 实现 "按需请求数据" 的通信方式。
-
错误帧
错误帧当检测出错误时,向其他单元通知错误的帧。
- 用于通知全网当前总线出现异常;
- 触发错误处理机制,如报文重发、节点错误计数累加;
- 是 CAN 高可靠性的重要保障机制。
-
过载帧
过载帧用于节点向总线申请延迟,告知其他节点自身暂时无法接收新报文。
- 常见于节点处理速度不足、接收缓冲区满等场景;
- 强制总线空闲一段时间,避免数据丢失;
- 过载帧并不常用,因为当今的CAN控制器会非常智能化地避免使用过载帧。
-
帧间隔
用于将数据帧及遥控帧与前面的帧分离开来的帧。
其中,错误帧、过载帧、帧间隔都是由硬件自动完成,没有办法用软件来控制。对于一般使用者来说,只需要掌握数据帧和遥控帧。
数据帧和遥控帧有标准格式和扩展格式,标准格式有11位标识符,扩展格式有29位标识符。
3.4.数据帧(Data Frame)
数据帧是CAN总线中最核心的报文类型,用于实现总线上各节点间的数据传输,其结构具有固定规范,可分为标准帧和扩展帧两类。其中标准帧是最常用的类型,以下重点介绍其具体结构:
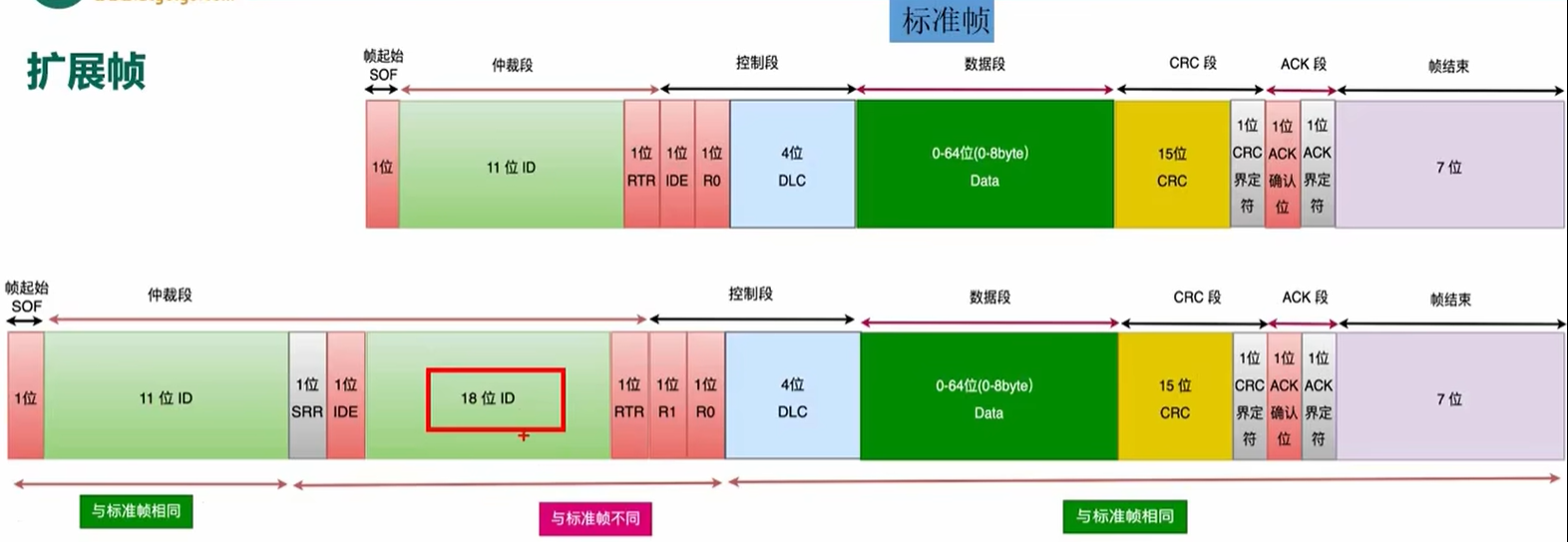
3.4.1.标准帧结构
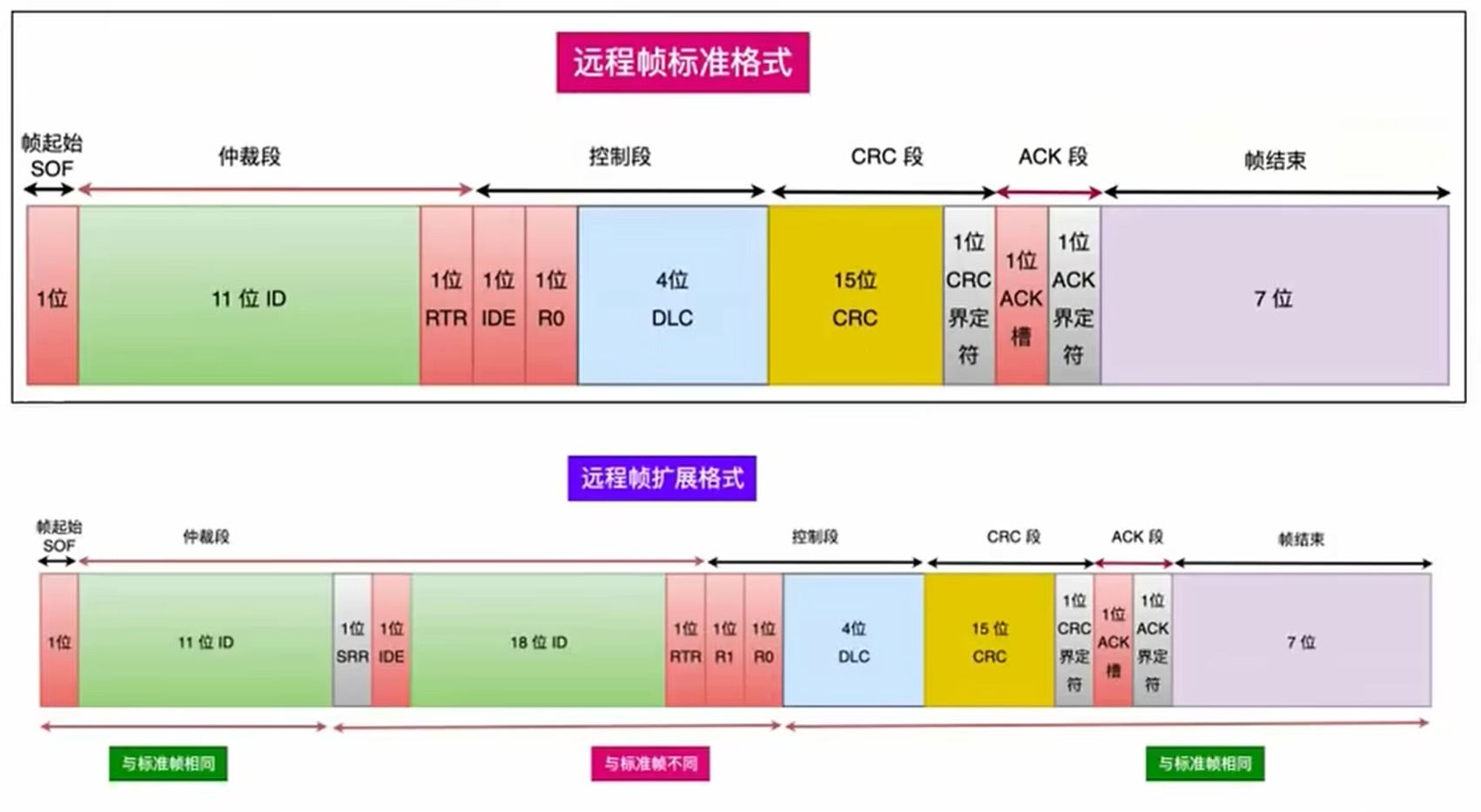
标准帧结构由帧起始SOF、仲裁段、控制段、数据段、CRC段、ACK段、帧结束EOF 七个大部分组成,如下图所示即为标准帧结构。

针对上图标准帧结构的各段进行解释说明:
-
帧起始:Start Of Frame-SOF
- 位长:1bit,固定为显性信号(逻辑0)。
- 作用:明确表示数据帧(或远程帧)的传输开始。
- 发送规则:仅能在总线处于空闲状态时,发送帧起始信号。
-
仲裁段
仲裁段(Arbitration Field)主要用于总线仲裁,包含两个核心部分:标识符位(Identifier field-ID)和远程发送请求位(Remote Transfer Request-RTR)。
- 标识符位 :
- 长度:11位(11bit),范围为ID10 ~ ID0,传输时按照ID10至ID0的顺序进行。
- 作用:它属于功能性地址,CAN总线的接收节点会通过该标识符,对数据帧进行过滤筛选,判断是否接收该报文。
- 远程发送请求位RTR :
- 长度:1位(1 bit)
- 作用:是区分当前帧的类型。其中显性信号(逻辑0)代表数据帧(Data Frame),隐性信号(逻辑1)代表远程帧(Remote Frame)。
- 标识符位 :
-
控制段
控制段(Control Field)一共6位,包括IDE位(Identifier Extension) 、R0位 、DLC段(Data Length Code)。
- IDE位(ID扩展位 ):
- 位长:1位
- 作用:用于区分标准格式与扩展格式。显性电平(逻辑0)代表标准格式,隐性电平(逻辑1)代表扩展格式。
- R0位
- 位长:1位。
- 作用:保留位,方便以后扩展使用。
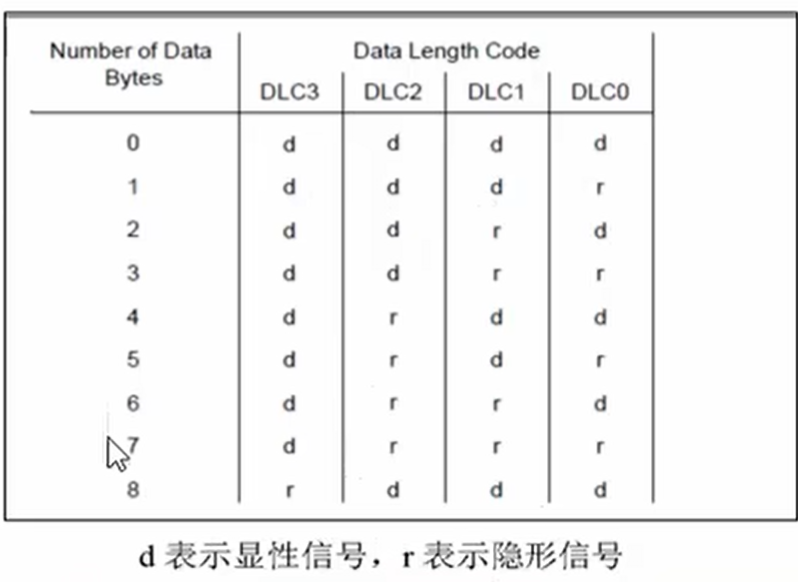
- DLC段
- 位长:4位(对应 DLC3、DLC2、DLC1、DLC0 四个独立位)。
- 作用:用于表示数据段包含的字节数,有效值范围为0~8,是接收方解析数据长度的唯一依据。
- 编码规则 :4 位 DLC 通过不同的显性 / 隐性信号组合,与 0~8 字节数据一一对应,具体编码逻辑如下表所示:
- IDE位(ID扩展位 ):
-
数据段
数据段(Data Field)是数据帧的核心内容,它是节点要发送的原始信息。
- 长度范围:由 DLC 段决定,包含0 ~ 8 个字节(即 0~64 位),是 CAN 协议中数据承载的唯一区域。
- 传输顺序:严格遵循 ** 高位先行(MSB first)** 规则,即每个字节的最高位(Bit7)优先发送,最低位(Bit0)最后发送。
- 边界约束 :数据段实际发送的字节数,必须与 DLC 声明的长度一致。
若有效数据不足 DLC 规定长度,剩余字节 / 位需用 隐性电平(逻辑 1) 填充,保证帧结构完整连续。 示例说明假设 DLC = 2,表示本次数据段长度固定为 2 字节(16 位)。
而当前有效业务数据只有 1 字节
0x12,不足 2 字节。发送时处理方式:
- 先发送有效数据:
0x12 - 剩余 1 字节用隐性电平填充,即
0xFF - 最终数据段为完整 2 字节:
0x12 0xFF
对 CAN 控制器而言,这就是合法的 2 字节数据段;
接收方收到后,由上层应用协议决定是使用全部 2 字节,还是只取前 1 字节为有效数据。
- 先发送有效数据:
-
CRC段
CRC段(CRC Field)包含CRC校验码和界定符2个部分。
- CRC校验码
- 长度:CRC校验码长度为15bits。
- 作用 :用于校验传输是否正确。对帧起始、仲裁段、控制段、数据段的所有数据进行循环冗余校验,接收方通过校验结果判断传输过程是否出现位错误。
- 界定符
- 长度:1bit。
- 电平:固定为 隐性电平(逻辑 1)
- 作用 :作为分隔标志,表示CRC校验码区域结束(固定为逻辑1),为后续 ACK 段做准备,保证帧结构边界清晰。
- CRC校验码
-
ACK段
ACK段(ACK Field)是应答,包含ACK确认位 和界定符。
- ACK确认位
- 长度:1bit隐性位(逻辑 1)。
- 作用:发送端的ACK确认位默认为隐性位,接收端接收到正确的CRC校验位后,把这ACK确认位的值置为显性位,说明接收端接收到了数据。
- 界定符
- 长度:1bit。
- 电平:固定为 隐性电平(逻辑 1)。
- 作用:作为分隔标志,与后面的帧结束隔开。
- ACK确认位
-
帧结束
帧结束段 EOF(End Of Frame)由发送节点发送的7个隐性位表示结束。
3.4.2.扩展帧结构
扩展帧(Extended Frame)在标准帧基础上同时修改了仲裁段与控制段,其余段结构与标准帧完全一致。
-
核心差异1:仲裁段
结构:11 位基本 ID + SRR + IDE + 18 位扩展 ID + RTR(共 32 位)- SRR 位 :固定为隐性电平(1),仅为占位位,用来替代标准帧中 RTR 所在位置,仅用于总线兼容与仲裁,不参与帧类型判断。
SRR 设为隐性 1,目的是让标准帧在总线竞争时优先级更高,保证向下兼容。 - IDE 位:固定为隐性电平(1),标识当前为扩展帧。
- 18 位扩展 ID:在 11 位基本 ID 后追加,使总 ID 长度达到 29 位,极大扩展了 CAN 总线的寻址空间。
- RTR位:唯一用于区分数据帧与远程帧的标志位,与标准帧定义完全一致,不受 SRR 位影响。
- SRR 位 :固定为隐性电平(1),仅为占位位,用来替代标准帧中 RTR 所在位置,仅用于总线兼容与仲裁,不参与帧类型判断。
-
核心差异2:控制段
结构:R1 + R0 + DLC- R1:扩展帧新增的保留位,固定为显性电平(0),为协议扩展预留。
- R0 :保留位,固定为显性电平(0)。
R0、R1 设为显性 0,只是普通保留位,遵循协议默认填充规则,无仲裁竞争目的。 - DLC:4 位数据长度码,用于表示数据段字节数,范围 0~8,功能与标准帧一致。
-
其余段结构
控制段、数据段、CRC 段、ACK 段、帧结束,与标准帧完全相同,保证协议兼容性与可移植性。
3.5.远程帧(Remote Frame)
远程帧相比数据帧没有数据段,其他段一样。
3.6.CAN总线仲裁机制
CAN 总线采用非破坏性位仲裁机制,CAN总线处于空闲状态的时候,最先发送消息的单元(节点)获得发送权。
报文 ID 数值越小,优先级越高 。当多个节点同时开始发送报文时,从仲裁段(报文 ID)的第一位起逐位进行仲裁,连续输出显性电平越多的节点越能继续发送;一旦某个节点发送隐性电平而总线上出现显性电平(CAN 总线为线与逻辑,显性电平对应逻辑 0,节点主动驱动总线产生差分电压;隐性电平对应逻辑 1,总线仅为高阻悬浮无差分电压,因此显性电平会覆盖隐性电平),则该节点竞争失败,失去总线占有权并转为接收模式。竞争失败的节点会自动监测总线状态,待总线再次空闲时立即重新尝试发送。
当某个节点发送数据帧的同时,另一节点以远程帧请求数据时,数据帧优先级高于远程帧。
由此可见,报文 ID 与 RTR 位共同参与 CAN 总线仲裁,这也是 RTR 位(用于区分数据帧与远程帧)被设计在仲裁段中的原因。
3.7.CAN的位时序
3.7.1 位时序的定义
CAN 总线的位时序,是对每一位数据的时间长度进行划分和定义的规则,核心是明确位周期、时间分段及采样点位置,为数据可靠采样提供基础。
3.7.2 位时序的核心作用
规定总线上传输的每一位的时间框架(位周期),明确采样点的标准位置,确保收发双方对"何时读取数据"形成共识,是 CAN 总线可靠通信的前提。
3.7.3 位时序的核心构成
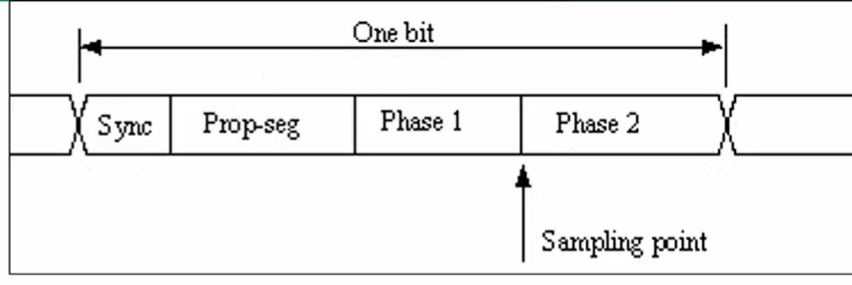
CAN 总线的每一个位周期(即单个比特的时间长度),通常分为4个核心时间分段,各分段协同作用,确保采样准确,具体细节如下:
3.7.3.1 基础概念
- 时间量子(TQ):是 CAN 位时序的最小时间单位,由节点内部时钟分频得到,位周期的总时长 = 各分段时长之和(通常为8~25个 TQ)。
- 位时间(Bit Time):4个时间分段的总时间,即传输一位数据所需的总时间。
- 时间量化器:将位时间分为若干等长的时间单元(即 TQ),Sync、Pro-seg、Phase 1、Phase 2 四个分段的时间均为 TQ 的整数倍。
- TQ 长度设置:可根据传输速率需求调整,在 STM32 的 CAN 外设中,通过设置波特率分频器的值来确定 TQ 的大小。
每一位周期的时间分段示意图如下:
3.7.3.2 四个核心时间分段详解(结合位同步机制)
四个时间分段并非独立存在,而是与位同步(硬同步、重同步)深度绑定,每一段的设计都直接服务于时钟偏差补偿和采样准确性。
核心逻辑 :
通过分段协同,配合硬同步、重同步机制,抵消时钟偏差累积,确保采样点始终稳定在位周期中心区域。
- 同步段为硬同步提供触发与对齐基础;
- 相位缓冲段 1/2 为重同步提供动态调整空间;
- 传播段为两种同步机制扫清延迟干扰。
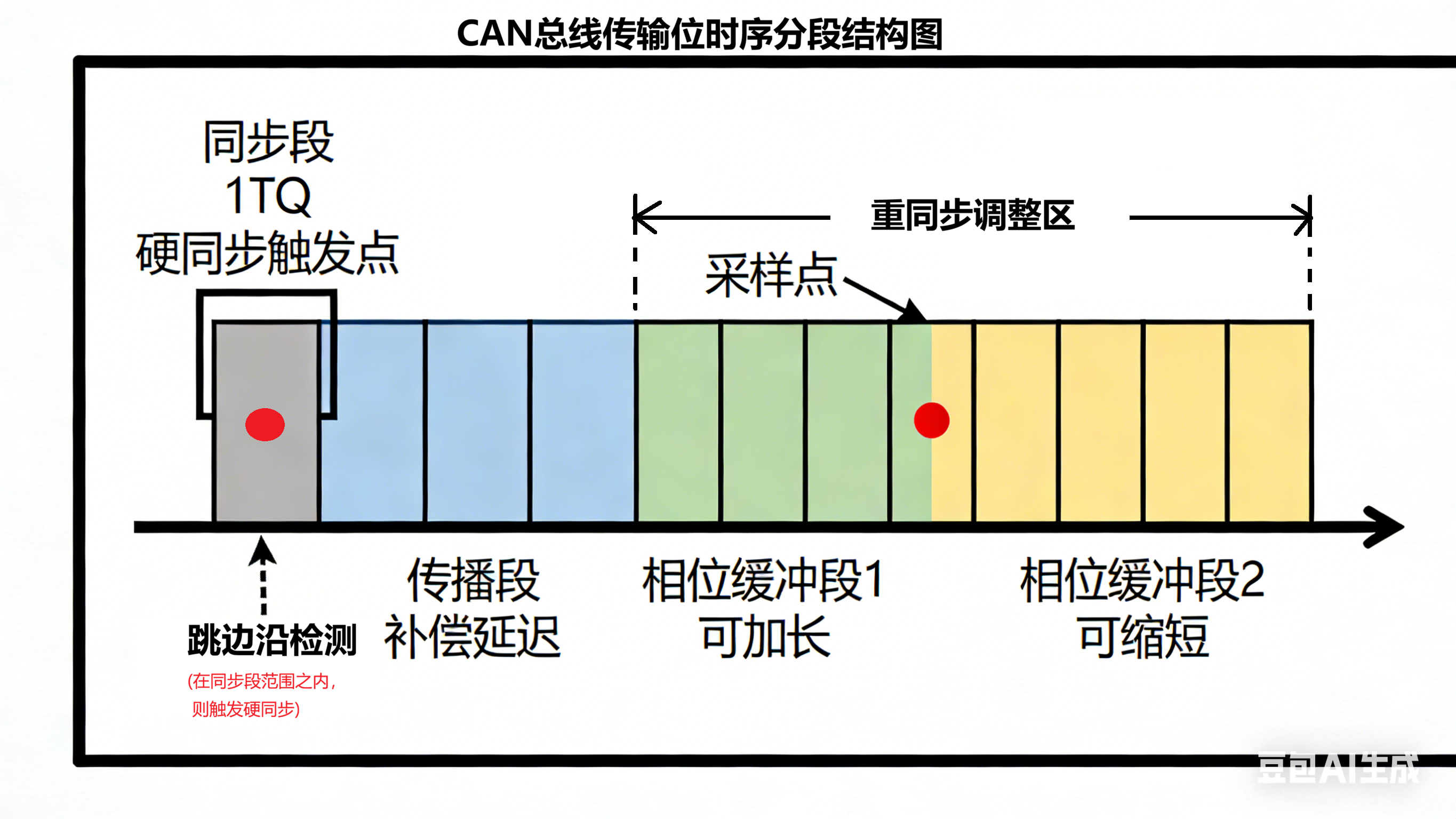
参考结构图,具体解析如下:
-
同步段(Sync Segment)
- 核心作用:检测总线帧SOF位(或数据段)电平跳变,为硬同步(或重同步)提供触发条件,是整个位同步机制的基础,确保节点与总线时序快速对齐。
- 时间长度 :长度固定为1个时间量子(TQ),不可动态调整,是整个位周期中唯一长度固定的分段。
- 同步检测与触发机制 :
- 跳变沿来源判断 :
- 若跳变沿来自 SOF(帧起始)位 :触发硬同步,强制将节点时序重置到同步段起点,完成全局时序对齐,不进入 "失步判定" 流程。
- 若跳变沿来自 数据段 / 仲裁段等非 SOF 位 :进入重同步检测流程。
- 重同步检测流程 :
- 若跳变沿被包含在同步段范围内:判定节点与总线时序同步,无需调整,维持当前位时序。
- 若跳变沿落在传播段或相位缓冲段 1 内 :判定为时序失步,触发重同步机制 ,通过调整相位缓冲段 1/2 的长度,将采样点拉回位周期中心。
- 若跳变沿落在相位缓冲段 2 内:属于异常时序偏差,通常被判定为总线错误,触发相应的错误处理。
- 跳变沿来源判断 :
-
传播段(Propagation Segment)
-
核心作用:补偿总线传输延迟与节点内部电路延迟,为硬同步、重同步提供准确、无延迟的电平信号,避免延迟干扰同步判断。
- 总线传输延迟:信号在CAN总线上传输过程中产生的时间延迟;
- 节点内部电路物理延迟:包括发送单元的发送延迟和接收单元的接收延迟。
-
时间长度:长度至少为1个时间量子(TQ),实际应用中通常配置为1~8个TQ,可根据总线长度、节点数量灵活调整。
-
-
相位缓冲段1(Phase Buffer Segment 1)
- 核心作用:专为重同步设计,可动态调整长度,初步补偿收发端的时钟偏差;当同步段检测到时序失步时,通过调整自身长度实现同步校准。
- 调整规则 :在重新同步阶段,若检测到时序失步,其时间长度可自动加长,带动同步段后移,从而将采样点向位周期中心调整。
- 时间长度:初始大小可配置为1~8个TQ;重同步时(进入重新同步阶段后),可根据失步程度自动加长(根据失步方向调整),灵活补偿时钟偏差。
-
相位缓冲段2(Phase Buffer Segment 2)
- 核心作用:与相位缓冲段 1 配合,共同服务于重同步,进一步精细调整采样点位置,确保采样点始终处于位周期的中心区域------该区域电平最稳定,可最大程度避免采样错误。
- 调整规则 :在重新同步阶段,可根据时序失步(不同步)情况自动缩短自身长度,带动同步段前移,与相位缓冲段1的"加长"调整形成配合,精准校准采样点。
- 时间长度:初始大小可配置为2~8个TQ;进入重新同步阶段后,可自动缩短(根据失步方向调整),实现采样点的精准校准。
3.7.4.位时序面临的核心问题------时钟偏差
3.7.4.1 时钟偏差的产生原因
CAN 总线无统一时钟线,各节点使用独立内部时钟,收发双方时钟频率天生存在微小差异(即时钟偏差)。
3.7.4.2 时钟偏差的累积效应(对比UART)
- UART 场景:帧长仅10位左右,微小时钟偏差来不及累积,采样点仍在有效位范围内,通信可靠。
- CAN 场景:一帧数据位数远超10位,偏差持续累积,导致采样点偏离位中心,最终引发采样错误。
3.7.4.3 采样错误的直观体现(附示意图)
如下图所示,是仅靠固定波特率计时、不进行同步调整时,CAN 长帧的采样情况:
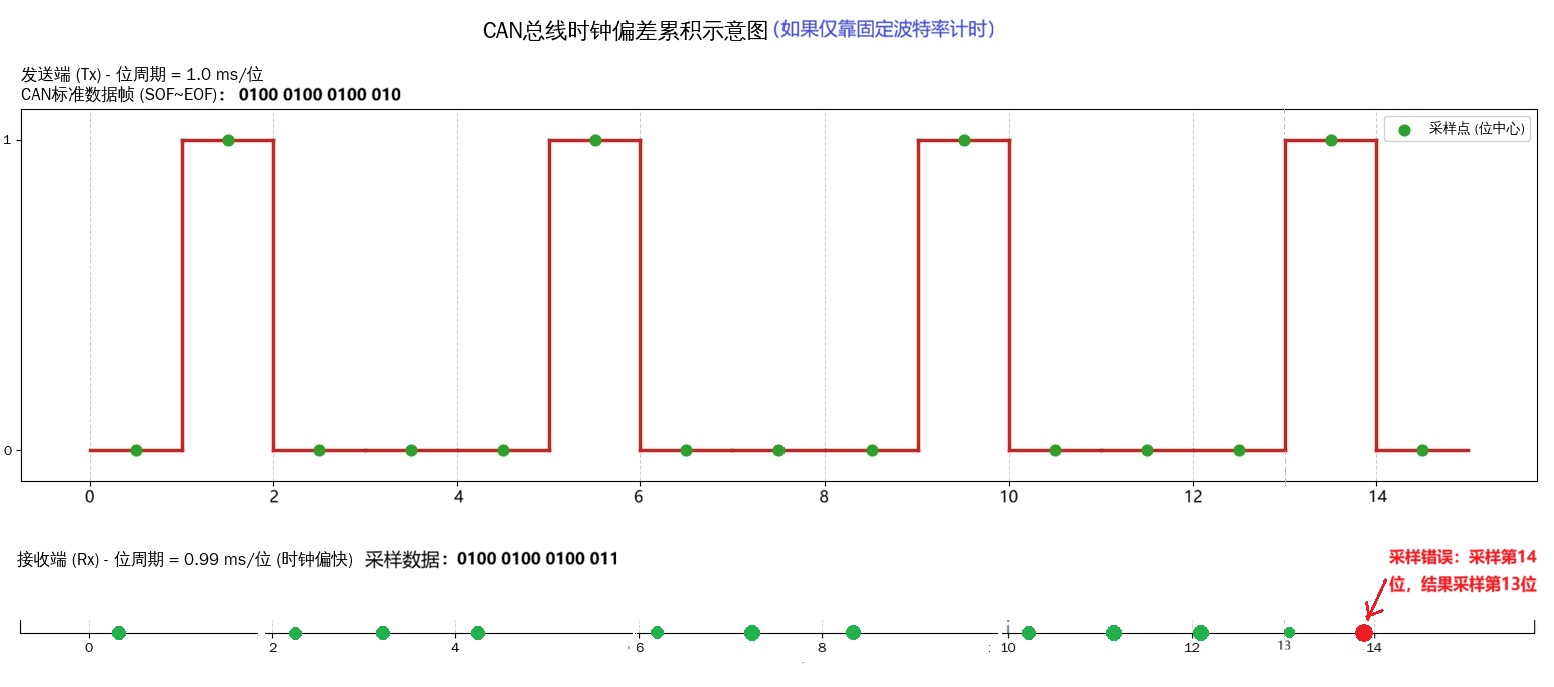
图中核心细节:接收端时钟偏快(位宽更短),采样点从第1位开始漂移,前10位(UART帧长)采样正常,第14位时采样点超出位范围,引发采样错误。
3.7.5 位同步(解决时钟偏差)
3.7.5.1 核心目的
动态调整采样时刻,抵消时钟偏差累积带来的采样偏移,确保采样点始终对准位周期中心,保障 CAN 长帧通信可靠,避免因时序偏差导致的采样错误。
3.7.5.2 两种同步方式
CAN 总线通过两种同步方式,结合位时序的分段设计(同步段、相位缓冲段),实现时钟偏差的补偿,具体如下:
-
硬同步
- 触发条件 :当一个节点检测到数据帧的 SOF 起始位 时,触发硬同步操作。
- 核心作用:快速校准时序基准,将采样点对准电平跳变沿,解决突发的时序偏差,对应同步段的跳变检测功能。
- 操作过程:执行硬同步时,控制器的时间基准会立即调整,与检测到的电平跳变沿对齐,确保节点内部时间基准与数据帧时间基准一致。
-
重同步 :在检测到总线上的时序与节点使用的时序有相位差时(即总线上的非 SOF 位跳变沿 不在节点时序的同步段SS范围内),通过**延长相位缓冲段1(PBS1段)或缩短相位缓冲段2(PBS2段)**来获得同步(即让总线上的非 SOF 位跳变沿重新回到节点时序的同步段SS范围内)。
所有同步机制都是由CAN控制器硬件自动完成。而开发者只需要设置TQ 时间长度和位时序分段TQ数量,就可以确定CAN通讯的波特率。
3.7.6 设置CAN波特率
-
CAN 波特率
CAN 波特率由通讯节点共同约定:
- 单个时间量子 TQ 的时间长度
- 每一位数据包含多少个 TQ
满足以上两点,即可唯一确定 CAN 波特率。
-
设置方法
- TQ 时间长度:根据目标波特率调整时钟分频,在 STM32 CAN 外设中,通过配置 BRR(波特率预分频器)寄存器确定单个时间量子(Time Quantum, TQ)的时长。
- 位时序分段TQ数量 :手动为传播段、相位缓冲段 1、相位缓冲段 2分别分配对应的 TQ 数量 (各分段 TQ 数量范围参考 3.7.3.2算),同步段固定是 1 TQ,不需要配置,硬件自动计算。
四个分段的 TQ 数量之和,构成一个完整位周期的总 TQ 数。
-
计算CAN波特率
假设右图中的1Tq=1us ,而每个数据位由20个Tq 组成,则传输一位数据需要时间为20us,> 从而每秒可以传输的数据位个数为: 1 *1000000/20= 50000
这个每秒可以传输的数据位的个数就是CAN通讯的波特率,比如上面的波特率就是50kbps。
3.6.CAN的位填充
3.6.1 位填充的核心作用
CAN 总线使用NRZ 非归零编码,如果总线长时间保持同一电平(连续很多个 1 或 0),没有电平跳变沿,接收端就无法触发重同步,收发时钟偏差会持续累积,最终导致采样错误。
位填充 与位同步配合,共同保证总线传输时序的正确性:
- 位同步:利用跳变沿校准位时序,把采样点拉回稳定位置
- 位填充:主动制造跳变沿,保证重同步能一直有触发条件
3.6.2 发送端填充规则
发送端在发送帧起始到 CRC 序列这段数据时,遵循:
连续出现 5 个相同电平(5 个 1 或 5 个 0),
自动插入 1 个相反电平(5 个 1 后插 0;5 个 0 后插 1)。
插入目的:强制产生跳变沿,让接收端可以触发重同步,避免同步丢失。
3.6.3 接收端对位填充的处理
接收端会完整接收包括填充位在内的所有总线电平,并按以下逻辑处理:
- 正常采样与同步 :
接收端依然按照四个时间分段 + 重同步机制,对每一位进行采样,插入的填充位产生的跳变沿,会正常触发重同步,修正时钟偏移,保证采样点稳定。 - 检测并删除填充位 :
接收端同样统计连续相同电平的位数:- 当检测到连续 5 个相同电平 后,紧跟的第 6 位相反电平,识别为位填充位;
- 接收端自动丢弃该填充位,不将其送入数据缓冲区;
- 后续位继续按原始数据规则解析。
- 填充错误检测
- 若连续 5 个相同电平后,第 6 位仍然相同 ,判定为位填充错误(Stuff Error);
- CAN 控制器会自动识别该错误并进入相应错误处理流程。
一句话概括:填充位只用于同步,不参与实际数据;接收端采样时用它同步,同步完就扔掉,只还原原始有效数据。