目录
[4.1 障碍物斥力场](#4.1 障碍物斥力场)
[4.2 机间协同斥力](#4.2 机间协同斥力)
[4.3 合力控制](#4.3 合力控制)
[4.4 多无人机协同与防撞系统的核心机制](#4.4 多无人机协同与防撞系统的核心机制)
[4.4.1 分布式协同架构](#4.4.1 分布式协同架构)
[4.4.2 分级防撞策略](#4.4.2 分级防撞策略)
[4.4.3 任务协同逻辑](#4.4.3 任务协同逻辑)
1.程序功能描述
多无人机协同路径规划与防撞系统是无人机集群执行侦察、巡检、物资投送等任务的核心技术,其核心目标是让多架无人机在三维空间中,从不同起点独立飞往目标点,同时自主规避静态障碍物、避免机间碰撞,且严格遵循飞行物理约束。本文基于 MATLAB 仿真程序,深度解析人工势场法实现的多无人机协同路径规划与分布式防撞系统,涵盖核心算法原理、运动约束、协同机制、防撞逻辑及仿真验证全流程,揭示无人机集群自主导航的底层技术逻辑。该仿真系统部署5架无人机,在包含5个三维球形障碍物的空间内执行任务,通过引力-斥力复合势场实现路径规划,结合分布式感知与控制完成防撞,全程满足速度、加速度、角度等物理限制,最终实现无碰撞、高精度的协同飞行,是工业级无人机集群控制的典型轻量化实现方案。
2.测试软件版本以及运行结果展示
MATLAB2024B版本运行
3.部分程序
%% ==================== 图4: 三维轨迹(静态) ====================
figure('Position',150 200 900 700,'Color','w');
hold on;
sx,sy,sz = sphere(20);
for o = 1:N_obs
surf(obstacles(o,1)+obstacles(o,4)*sx, ...
obstacles(o,2)+obstacles(o,4)*sy, ...
obstacles(o,3)+obstacles(o,4)*sz, ...
'FaceColor',0.8 0.3 0.3,'FaceAlpha',0.3,'EdgeColor','none');
end
for i = 1:N_uav
tx = squeeze(hist_pos(1:Nk,i,1));
ty = squeeze(hist_pos(1:Nk,i,2));
tz = squeeze(hist_pos(1:Nk,i,3));
plot3(tx, ty, tz, '-','Color',uav_colors(i,:),'LineWidth',2);
plot3(starts(i,1),starts(i,2),starts(i,3),'o','Color',uav_colors(i,:),...
'MarkerSize',12,'MarkerFaceColor',uav_colors(i,:));
plot3(goals(i,1),goals(i,2),goals(i,3),'p','Color',uav_colors(i,:),...
'MarkerSize',15,'MarkerFaceColor',uav_colors(i,:));
end
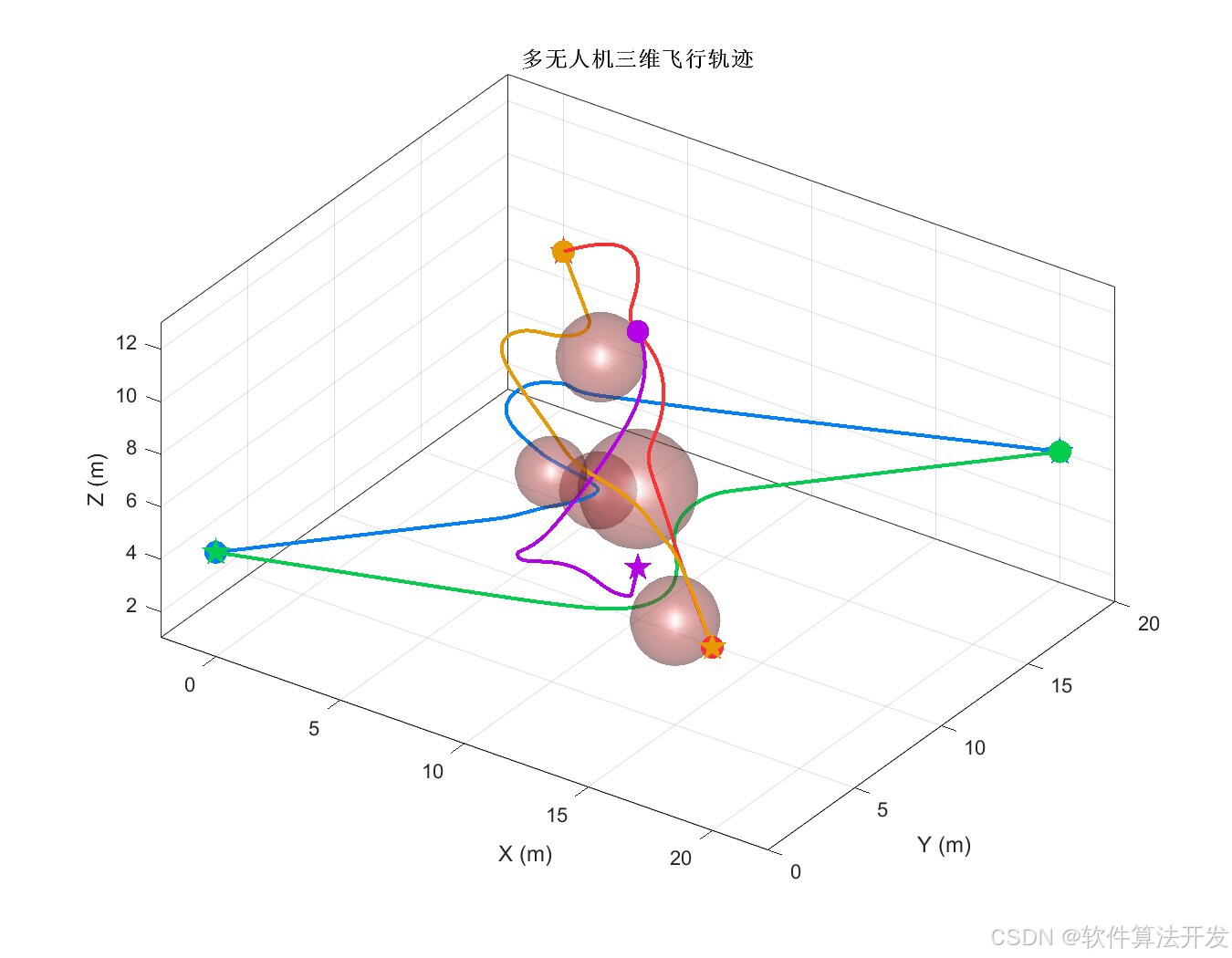
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('多无人机三维飞行轨迹','FontSize',15,'FontWeight','bold');
grid on; box on; axis equal; view(35,30);
lighting gouraud; camlight('headlight');
set(gca,'FontSize',11);
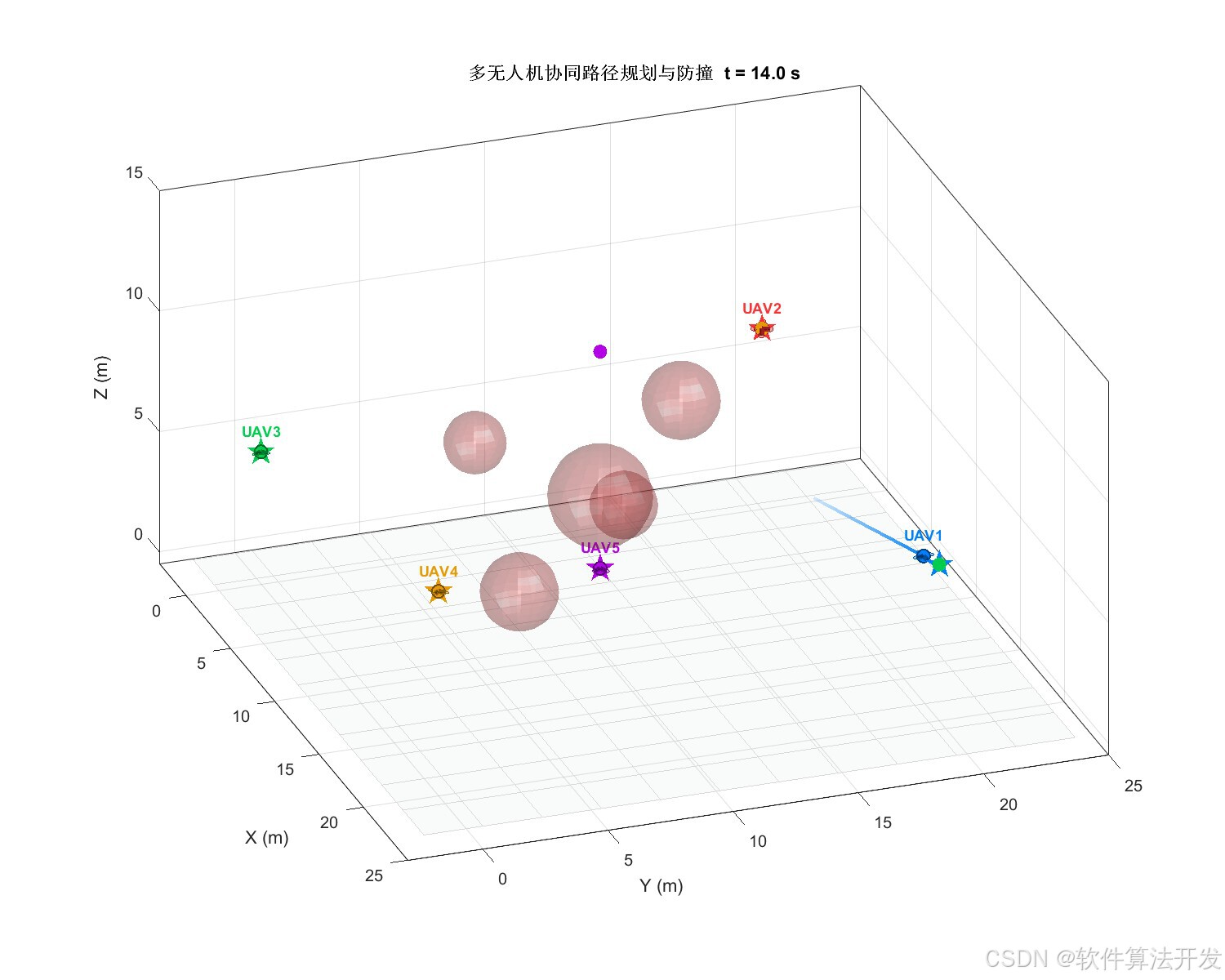
%% ==================== 图5: 三维动态飞行动画 ====================
fprintf('\n播放三维动态飞行动画...\n');
fig5 = figure('Position',100 50 1000 800,'Color','w','Name','多无人机3D动态飞行');
140
4.算法理论概述
程序的核心控制算法为改进型人工势场法,该算法模拟物理场的受力特性,将无人机的运动转化为目标引力、障碍物斥力、机间防撞斥力的合力驱动,是无人机路径规划中计算量小、实时性强、适合集群分布式控制的经典算法。
引力场的作用是为每架无人机提供指向目标点的牵引力,让无人机保持向目标飞行的趋势。程序中通过参数k_att(引力增益系数)调控引力大小,引力的数学模型与计算逻辑为:

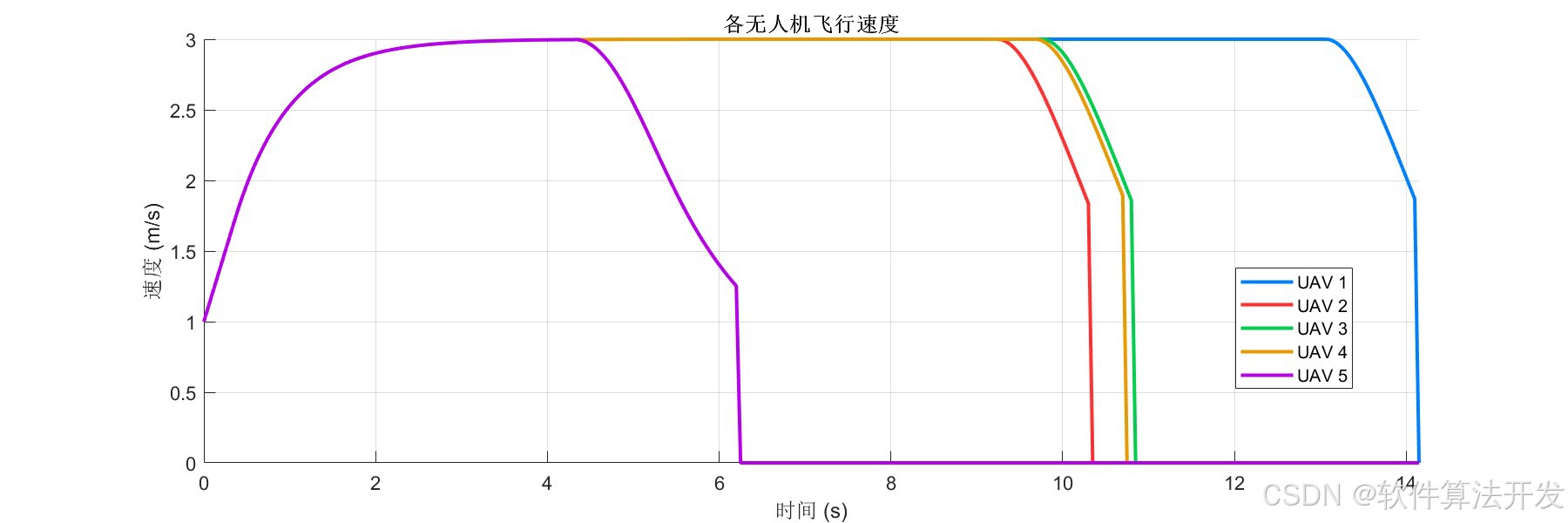
其中,Puav是无人机当前三维坐标,Pgoal是目标点坐标。引力大小与无人机到目标点的距离成正比,距离越远引力越大,加速无人机向目标靠拢;距离越近引力越小,实现平滑减速。当无人机与目标点距离小于阈值eps_arrive=1.0m时,判定为到达目标,速度置零,完成任务。
4.1 障碍物斥力场
斥力场用于规避环境中的固定障碍物,程序中预设5个三维球形障碍物,仅当无人机进入障碍物的预警范围d0_obs=4.0m时,斥力才会生效。障碍物斥力的核心设计包含两点:一是斥力大小与无人机到障碍物的距离成反比,距离越近斥力越强;二是斥力方向沿无人机与障碍物的连线向外,实现强制规避。其数学模型为:

式中,kobs为障碍物斥力系数,d为无人机与障碍物的实际距离,nobs为单位外法向量。该设计确保无人机在远离障碍物时不受斥力干扰,保持最优路径;靠近时快速产生强斥力,实现无碰撞避障。
4.2 机间协同斥力
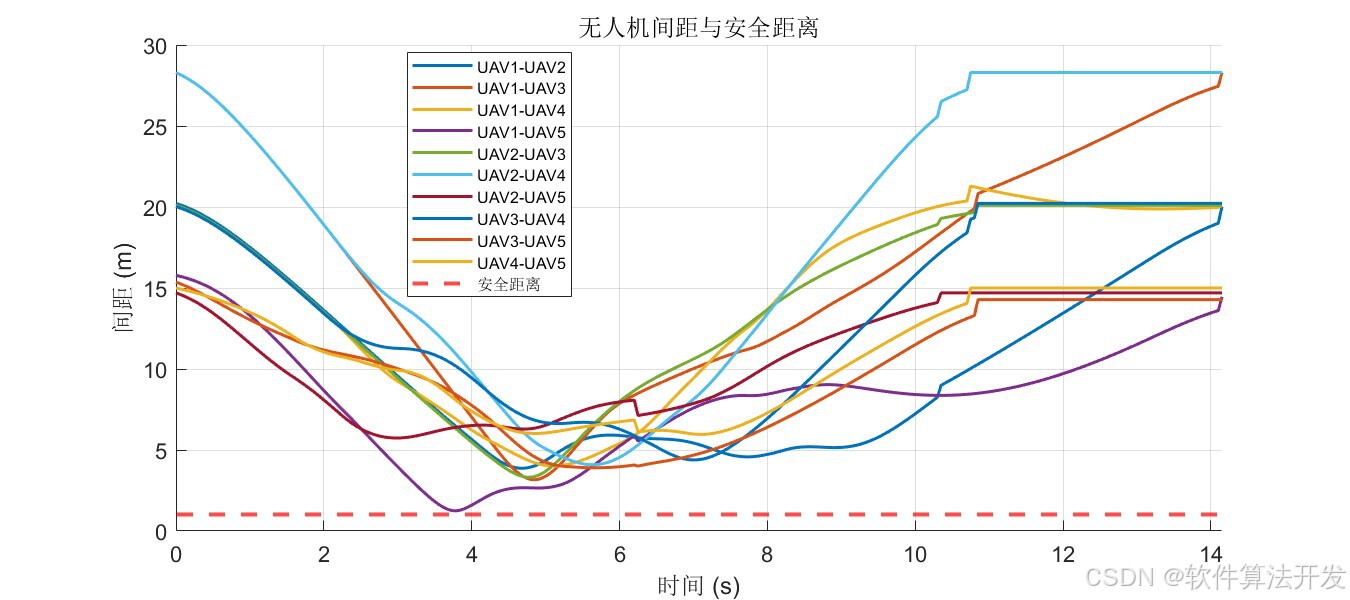
这是多无人机协同的核心机制,区别于单无人机避障,程序通过分布式感知计算每架无人机与其他所有无人机的距离,当间距小于安全距离d_safe=3.0m时,触发机间防撞斥力。其数学模型与障碍物斥力同源,通过k_sep(机间斥力系数)调控强度:

其中dij为无人机i与j的间距,nij为单位分离向量。该机制无需中央控制器,每架无人机独立计算相邻无人机的斥力,实现分布式防撞,大幅提升集群的鲁棒性和扩展性。
4.3 合力控制
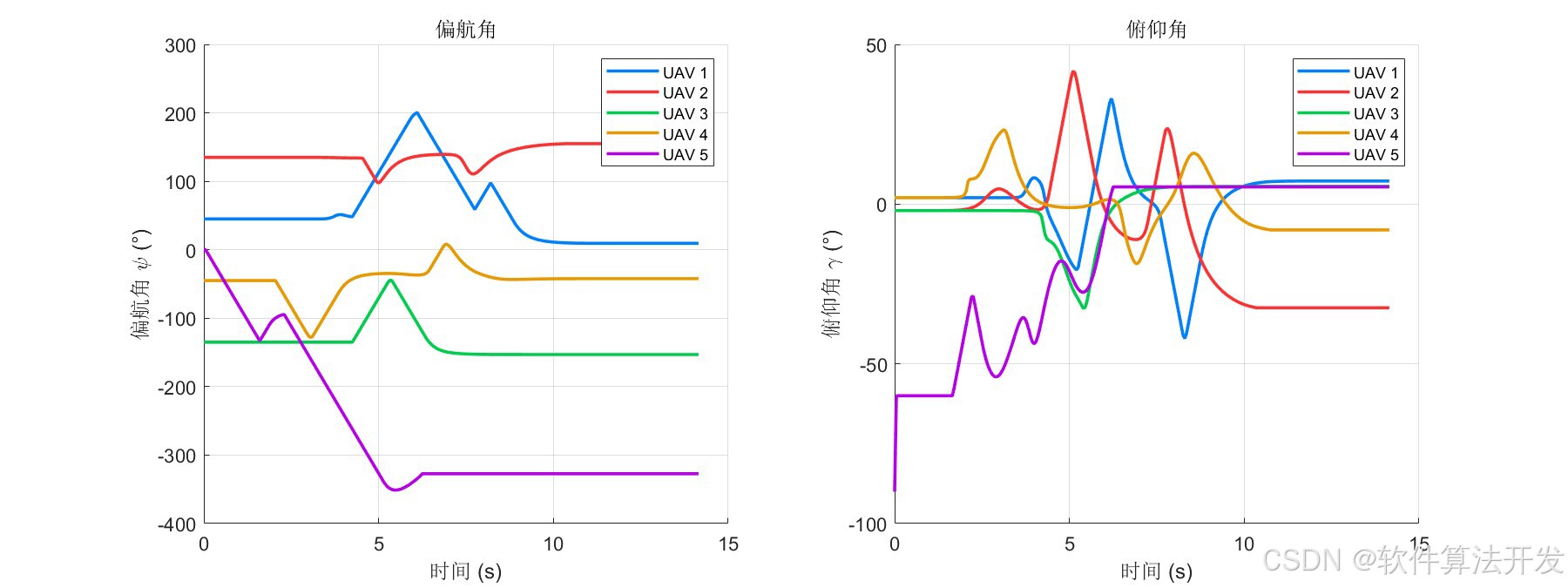
最终无人机的运动由三大受力的矢量和决定:Ftotal=Fatt+Fobs+Fsep。程序对合力进行幅值限制(最大50),避免力过大导致运动失控。合力的方向决定无人机的飞行姿态(偏航角、俯仰角),合力的大小决定无人机的速度与加速度,实现姿态 - 速度一体化控制。
4.4 多无人机协同与防撞系统的核心机制
4.4.1 分布式协同架构
系统采用无中心分布式架构,5 架无人机无主从之分,每架无人机独立完成三大操作:感知自身位置与姿态、计算引力与斥力、更新运动指令。无人机之间仅需共享位置信息,无需全局规划,这种架构的优势在于:单架无人机故障不影响整体集群、计算效率高、可灵活扩展无人机数量。
4.4.2 分级防撞策略
程序设计了双重防撞阈值,实现分级预警与规避:
预警安全距离
d_safe=3.0m:无人机间距低于该值时,触发机间斥力,主动调整姿态远离;临安全距离
r_safe=1.0m:绝对禁止突破的最小距离,仿真中通过动态动画标注红色预警线,确保无碰撞。
4.4.3 任务协同逻辑
程序预设5架无人机的起点与目标点交叉分布,模拟复杂集群任务。每架无人机独立判断是否到达目标,未到达时持续执行势场控制,到达后速度置零并锁定位置。系统实时检测所有无人机的任务状态,全部到达后自动终止仿真,实现任务闭环。
5.完整程序
VVV
关注后手机上输入程序码:144