边缘检测是计算机视觉和图像处理中的核心步骤,用于识别图像中亮度变化剧烈的区域(如物体轮廓)。OpenCV提供了多种边缘检测算法,包括Canny、Sobel、Scharr和Laplacian,每种算法各有特点,适用于不同场景。本文将系统梳理这些算法的原理、实现方式及适用场景。
Sobel算子
原理
Sobel算子基于一阶导数,通过计算图像在水平和垂直方向的梯度来检测边缘。其核心是使用两个3x3的卷积核:
- 水平方向卷积核:检测垂直边缘
bash
[-1, 0, 1]
[-2, 0, 2]
[-1, 0, 1]- 垂直方向卷积核:检测水平边缘
bash
[-1, -2, -1]
[ 0, 0, 0]
[ 1, 2, 1]通过计算梯度幅值(G = sqrt(Gx^2 + Gy^2))确定边缘强度。
函数原型
bash
dst = cv2.Sobel(src, ddepth, dx, dy, ksize=3, scale=1, delta=0, borderType=cv2.BORDER_DEFAULT)- 参数说明:
- src:输入图像(灰度或彩色)。
- ddepth:输出图像深度(常用cv2.CV_64F保留负梯度)。
- dx/dy:导数方向(1表示求导,0表示不计算)。
- ksize:卷积核大小(奇数,默认3)。
示例代码
bash
import cv2
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)计算x方向梯度
bash
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
sobel_x_abs = cv2.convertScaleAbs(sobel_x) # 取绝对值计算y方向梯度
bash
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
sobel_y_abs = cv2.convertScaleAbs(sobel_y)合并梯度
bash
sobel_combined = cv2.addWeighted(sobel_x_abs, 1, sobel_y_abs, 1, 0)
cv2.imshow('Sobel Combined', sobel_combined)
cv2.waitKey(0)特点
- 优点:计算简单,适合检测水平和垂直边缘。
- 缺点:对噪声敏感,边缘检测效果一般。
Scharr算子
原理
Scharr算子是Sobel算子的改进版本,在3x3核中优化了权重分配(中心元素权重更高),对边缘的响应更强,尤其适合检测细微边缘。
函数原型
bash
dst = cv2.Scharr(src, ddepth, dx, dy, scale=1, delta=0, borderType=cv2.BORDER_DEFAULT)- 参数说明:与Sobel类似,但ksize固定为3。
示例代码
bash
scharr_x = cv2.Scharr(image, cv2.CV_64F, 1, 0)
scharr_x_abs = cv2.convertScaleAbs(scharr_x)
scharr_y = cv2.Scharr(image, cv2.CV_64F, 0, 1)
scharr_y_abs = cv2.convertScaleAbs(scharr_y)
scharr_combined = cv2.addWeighted(scharr_x_abs, 1, scharr_y_abs, 1, 0)
cv2.imshow('Scharr Combined', scharr_combined)
cv2.waitKey(0)特点
- 优点:精度高于Sobel,计算速度相近。
- 缺点:仍对噪声敏感。
Laplacian算子
原理
Laplacian算子基于二阶导数,通过计算图像的二阶变化检测边缘和角点。其卷积核为:
bash
[ 0, 1, 0]
[ 1, -4, 1]
[ 0, 1, 0]函数原型
bash
dst = cv2.Laplacian(src, ddepth, ksize=1, scale=1, delta=0, borderType=cv2.BORDER_DEFAULT)- 参数说明:
- ksize:卷积核大小(必须为正奇数,常用1、3、5)。
示例代码
bash
laplacian = cv2.Laplacian(image, cv2.CV_64F)
laplacian_abs = cv2.convertScaleAbs(laplacian)
cv2.imshow('Laplacian', laplacian_abs)
cv2.waitKey(0)特点
- 优点:能检测边缘和角点。
- 缺点:对噪声敏感,通常需结合高斯滤波使用。
Canny算子
原理
Canny是多阶段边缘检测算法,步骤包括:
1.高斯滤波去噪。
2.计算梯度幅值和方向(使用Sobel算子)。
3.非极大值抑制:保留局部梯度最大值。
4.双阈值边缘连接:区分强边缘和弱边缘。
函数原型
bash
edges = cv2.Canny(image, threshold1, threshold2, apertureSize=3, L2gradient=False)- 参数说明:
- threshold1/threshold2:低阈值和高阈值。
- apertureSize:Sobel算子核大小(默认3)。
示例代码
bash
edges = cv2.Canny(image, 100, 200)
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)特点
- 优点:抗噪能力强,边缘清晰完整。
- 缺点:参数调节较复杂。
算法对比与适用场景
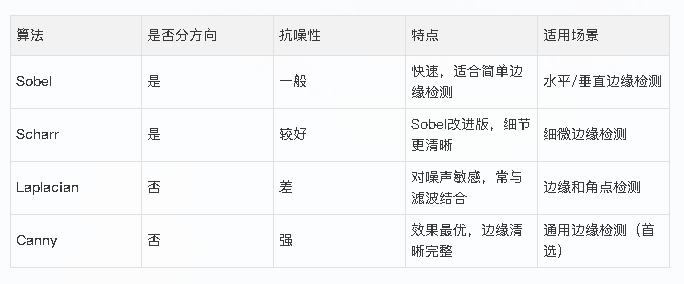
实践建议
- 快速检测:用Sobel或Scharr。
- 细节要求高:优先Scharr。
- 检测轮廓:Laplacian + 高斯滤波。
- 稳定性优先:Canny(通用场景推荐)