1.节点
cs
//是否可以行走
public bool isWalkable;
//节点的位置
public Vector2Int gridPos;
//起点->当前节点(准确值)
public float gCost;
//当前节点->终点(预测值)
public float hCost;
//总代价
public float FCost => gCost + hCost;
//上一个节点
public Node parent;2.网格管理
1)生成网格地图
cs
public void CreateMap()
{
Map = new Node[mapX,mapY];
for (int x = 0; x < mapX; x++)
{
for (int y = 0; y < mapY; y++)
{
//确定一个地图的原点(第一象限)
Vector2Int pos = new Vector2Int(mapOrigin.x + x,mapOrigin.y + y);
GameObject obj = Instantiate(nodePrefab, new Vector3(pos.x , pos.y , 0), Quaternion.identity,mapRoot);
Node node = obj.GetComponent<Node>();
node.gridPos = new Vector2Int(x,y);//将真实的世界坐标改变为虚拟坐标
node.isWalkable = true;
Map[x,y] = node;
}
}
}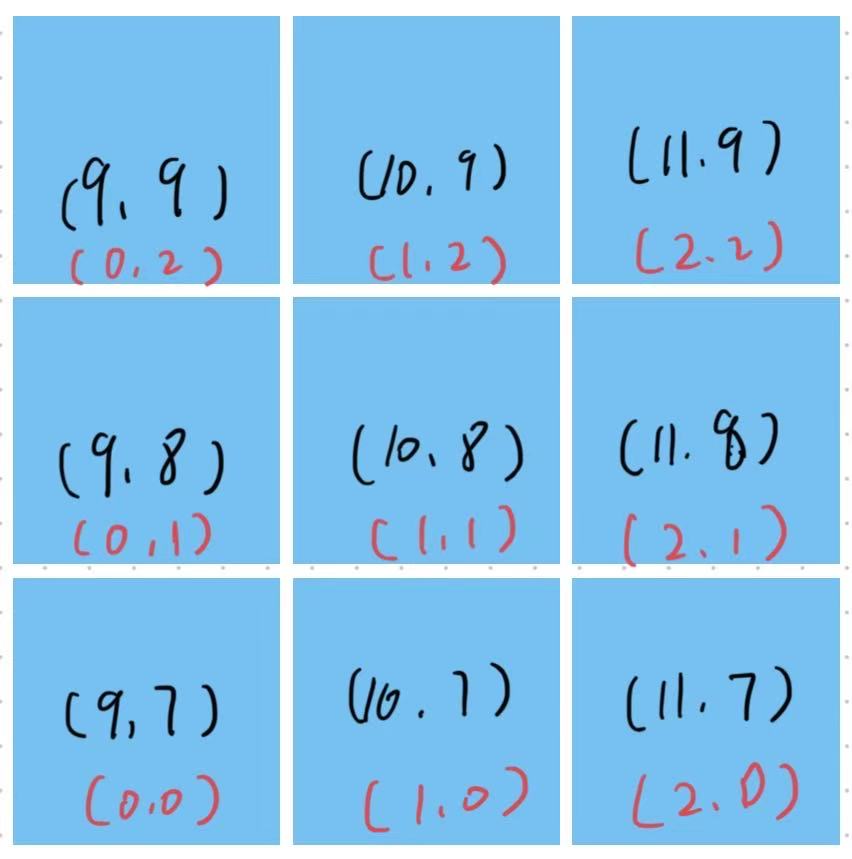
注:黑色为真实世界坐标,红色为虚拟坐标(参与实际路径计算)。
2)获取网格任意一个节点周围的节点
cs
public List<Node> GetNeighbors(Node node)
{
List<Node> neighbors = new List<Node>();
for (int x = - 1; x <= 1; x++)
{
for (int y = - 1; y <= 1; y++)
{
//指的是中心节点
if(x == 0 && y == 0)
continue;
//x与y其实是node的偏移值
int nodeX = node.gridPos.x + x;
int nodeY = node.gridPos.y + y;
//如果在地图里面就添加到列表中
if (nodeX >= 0 && nodeX < mapX && nodeY >= 0 && nodeY < mapY)
{
neighbors.Add(Map[nodeX,nodeY]);
}
}
}
return neighbors;
}3.算法核心
1)定义待探索队列与已探索(走过)队列
cs
List<Node> openList = new List<Node>();//待探索队列
HashSet<Node> closeList = new HashSet<Node>();//已探索队列
openList.Add(startNode);2)当探索队列还有时一直循环
3)找出探索队里fCost最小的节点(意味着总代价最小,路径更短);如果fCost相同就比较hCost(预估距离最小,gCost因为是确定值不做考虑),找出其最小的。
cs
Node currentNode = openList[0];
for (int i = 1; i < openList.Count; i++)
{
if (openList[i].FCost < currentNode.FCost ||
openList[i].FCost == currentNode.FCost && openList[i].hCost < currentNode.hCost)
{
currentNode = openList[i];
}
}4)找到最小的节点,就将其从待探索队列移到已探索队列。
cs
openList.Remove(currentNode);
closeList.Add(currentNode);5)如果当前节点等于目标节点就退出循环,并且回溯路径。
cs
//到达终点
if (currentNode == targetNode)
{
RetracePath(startNode, targetNode);
return;
}
cs
void RetracePath(Node startNode, Node endNode) {
List<Node> path = new List<Node>();
Node currentNode = endNode;
while (currentNode != startNode) {
currentNode.spriteRenderer.color = Color.green;
path.Add(currentNode);
currentNode = currentNode.parent;
}
path.Reverse();
}注:根据节点的Parent进行回溯操作。
6)如果没有到达终点,就获取当前节点的周围邻居节点 。周围邻居节点中如果时是障碍,或者已经探索过了就跳过。其余的就计算其gCost,如果比自己之前的小(距离初始点更近)(周围节点一开始gCost为零 ,因此newGCost > node.gCost,但是之前没待过任何队列,一定会加入待探索队列中 。 之后gCost赋值后,就比较谁的路径更短(往回走的话newCost会更大)),或者节点不在探索队列(不在任何队列),就计算这个邻居节点g/h/fCost,并且将当前节点标记为该节点的父节点,放入待探索队列。
cs
foreach (var node in gridManager.GetNeighbors(currentNode))
{
if(!node.isWalkable || closeList.Contains(node))
continue;
float newGCost = currentNode.gCost + GetDistance(currentNode, node);
if (newGCost < node.gCost || !openList.Contains(node))
{
node.gCost = newGCost;
node.hCost = GetDistance(node, targetNode);
node.parent = currentNode;
if(!openList.Contains(node)) openList.Add(node);
}
}7)预估代价的距离计算
1)四方向:哈曼顿距离
cs
int xDis = Mathf.Abs(node1.gridPos.x - node2.gridPos.x);
int yDis = Mathf.Abs(node1.gridPos.y - node2.gridPos.y);
return xDis + yDis;2)八方向:切比雪夫距离
cs
int xDis = Mathf.Abs(node1.gridPos.x - node2.gridPos.x);
int yDis = Mathf.Abs(node1.gridPos.y - node2.gridPos.y);
//横竖移动代价:10,斜向移动代价:14(√2≈1.414,取整)
const int straightCost = 10;
const int diagonalCost = 14;
//先斜向走min(dx,dy)步,再横竖走|dx-dy|步
return diagonalCost * Mathf.Min(xDis, yDis) + straightCost * Mathf.Abs(xDis - yDis);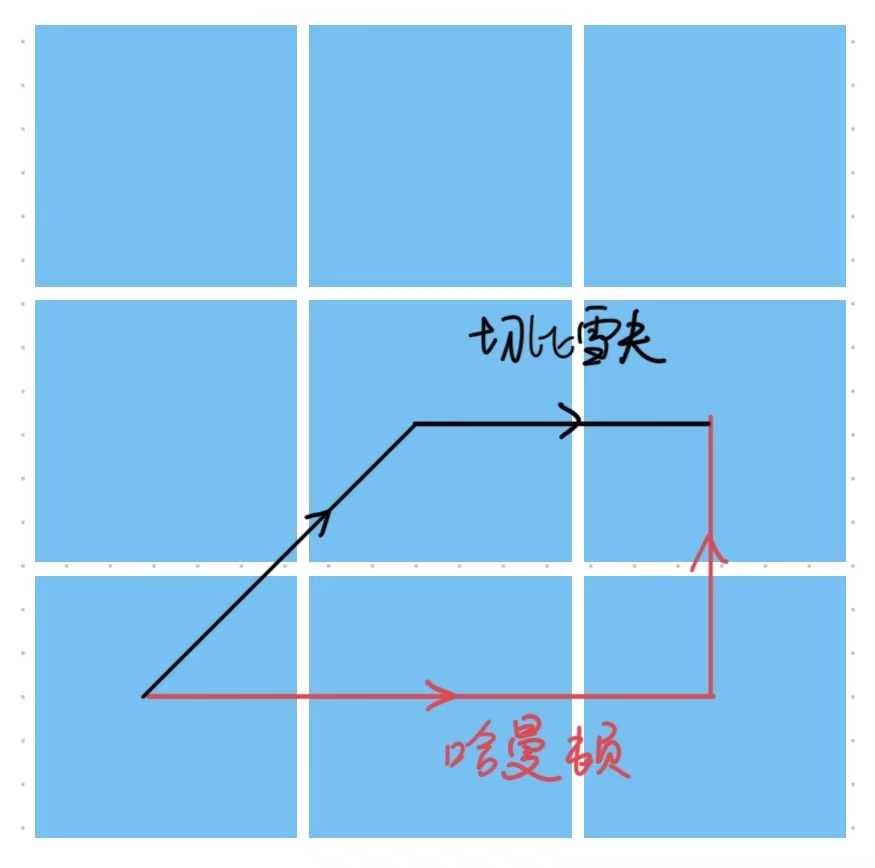
4.多单位A*算法的优化
1)待探索队列用Priority Queue(优先队列,方便查找最小值),已探索队列用HashSet(哈希表,查找方便)。
注:优先队列逻辑上是完全二叉,实际上是数组(通过公式计算索引),根为最小值,查找更快。
2)起始位置相同:直接复用缓存路径。
3)起点不同,终点相同:用迪杰斯特拉算法从终点反向扩散,生成每个节点的方向。