目录
1.摘要
针对智慧农业果园采收中的多机器人任务分配问题,本文研究了在工期与能耗两个目标下的协同优化,并综合考虑了任务可拆分、机器人多路径重复利用以及负载相关能耗等实际因素。为解决任务拆分导致决策空间急剧扩大的难题,本文提出了一种自适应多目标任务拆分算法(AMTSA),其采用混合编码表示任务分配信息,并在搜索过程中动态调整策略:前期侧重路径结构的全局探索,后期聚焦任务拆分优化以加快收敛。
2.数学模型
农业多机器人任务分配问题,在满足任务可拆分、载重限制和路径分配约束的前提下,同时最小化最大完工时间与总能耗。
min T max = max k ∈ R ∑ s ∈ S T s ⋅ z k s \min\:T_{\max}=\max_{k\in R}\sum_{s\in S}T_s\cdot z_{ks} minTmax=k∈Rmaxs∈S∑Ts⋅zks
表示最小化系统中各机器人完成任务的最大完工时间。
min E t o t a l = ∑ s ∈ S E s \min\:E_{total}=\sum_{s\in S}E_s minEtotal=s∈S∑Es
表示最小化所有路径的总能耗。
T i j k = d i j V T_{ijk}=\frac{d_{ij}}V Tijk=Vdij
表示机器人从节点 i i i到节点 j j j的行驶时间。
T i k s = t p i c k ⋅ q i ⋅ p i k s T_{iks}=t_{pick}\cdot q_i\cdot p_{iks} Tiks=tpick⋅qi⋅piks
表示节点 i i i在路径 s s s上的采摘时间,与任务拆分比例相关。
E i j k = d i j ( W + L i k ⋅ w a ) g μ η × 10 − 3 E_{ijk}=\frac{d_{ij}(W+L_{ik}\cdot w_a)g\mu}\eta\times10^{-3} Eijk=ηdij(W+Lik⋅wa)gμ×10−3
表示从 i i i到 j j j的行驶能耗,其大小受距离、机器人自重和当前负载共同影响。
3.方法
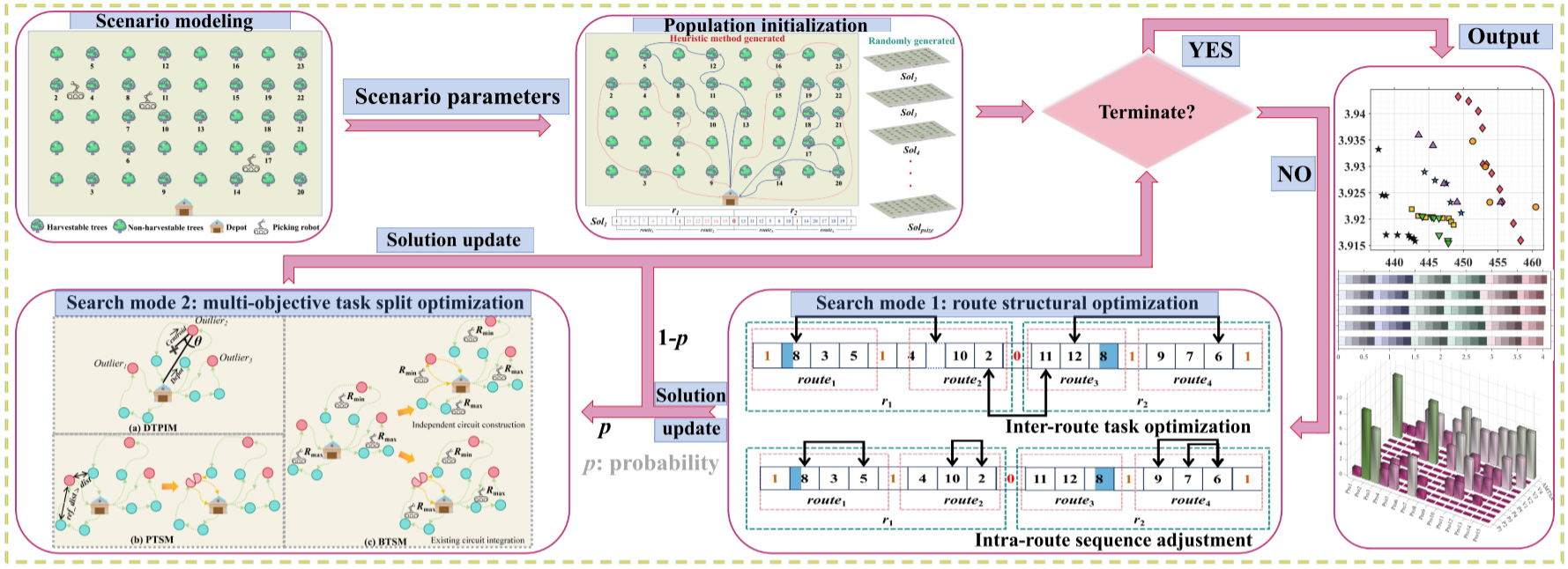
算法框架通过启发式方法生成初始解,并随机生成其他解以增加多样性。算法交替使用两种搜索模式:模式1侧重路径结构优化,推动多样化搜索;模式2结合任务拆分优化,进行精细的收敛性搜索。
解表示方案
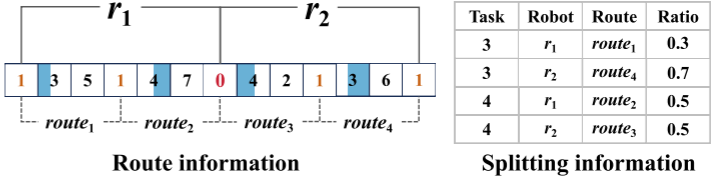
算法采用混合编码方案分别为路径信息和任务拆分信息设计独立组件,在路径编码中,0和1分别表示仓库,0标记分配给不同机器人的任务,1区分同一机器人执行的多条路径。
路径结构优化
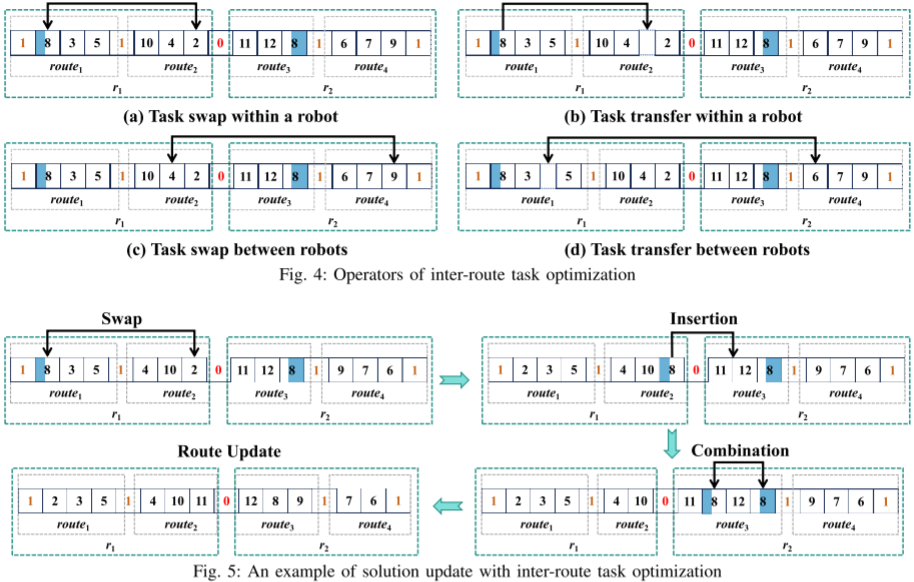
路径结构优化是 AMTSA 在搜索初期进行邻域搜索的主要手段,核心是通过路径间任务优化与路径内序列调整两类操作,对解的结构进行修改。
算法引入外部档案来动态控制邻域搜索强度,其长度定义为:
L A = C a v g ( 1 − R n d ) L_A=C_{avg}(1-R_{nd}) LA=Cavg(1−Rnd)
其中, C a v g C_{avg} Cavg表示机器人平均路径数的平方根,用于反映路径结构复杂度; R n d R_{nd} Rnd表示当前种群中非支配解的比例,用于衡量种群收敛程度。
多目标任务拆分优化
MTSO 针对非支配解集进行优化,不像模式 1 随机搜索,而是围绕完工时间最长的瓶颈机器人展开任务拆分优化。先识别各路径中的偏离任务点,再交替执行基于邻近性的任务拆分和基于平衡性的任务拆分,从而同时兼顾路径空间布局与机器人间时间平衡。
在偏离任务点识别中,算法用下式衡量任务点相对路径任务簇的偏离程度:
D e v = sin ( θ ) × ∥ d i s c e n t ∥ ∥ d i s d e p o t ∥ Dev = \sin(\theta) \times \frac{\|dis_{cent}\|}{\|dis_{depot}\|} Dev=sin(θ)×∥disdepot∥∥discent∥
其中, sin ( θ ) \sin(\theta) sin(θ) 反映任务点、簇中心和仓库之间的方向一致性, ∥ d i s c e n t ∥ / ∥ d i s d e p o t ∥ \|dis_{cent}\| / \|dis_{depot}\| ∥discent∥/∥disdepot∥ 则综合刻画该点相对任务簇和仓库的位置关系。 D e v Dev Dev 越大,说明该任务点越偏离主任务簇,更适合作为拆分优化对象。
在**邻近性任务拆分机制(PTSM)**中,算法根据空间邻近关系为任务寻找更合适的接收路径,其拆分比例定义为:
α = min { 1 , C a v a i l D o r i g , T r e f − T c u r r e n t T t a s k } \alpha = \min\left\{1, \frac{C_{avail}}{D_{orig}}, \frac{T_{ref} - T_{current}}{T_{task}}\right\} α=min{1,DorigCavail,TtaskTref−Tcurrent}
同时考虑接收路径的剩余容量和系统时间平衡需求,并满足任务总执行比例约束:
∑ i = 1 k α i = 1 , ∀ α i ∈ 0 , 1 \sum_{i=1}^{k} \alpha_i = 1, \quad \forall \alpha_i \in 0, 1 i=1∑kαi=1,∀αi∈0,1
对于新插入任务,算法进一步选择使额外行驶距离最小的位置:
P o p t = arg min i ∈ P { Δ d i = d i , t + d i , t + 1 − d i , i + 1 } P_{opt} = \arg\min_{i \in P} \{\Delta d_i = d_{i,t} + d_{i, t+1} - d_{i, i+1}\} Popt=argi∈Pmin{Δdi=di,t+di,t+1−di,i+1}
在**平衡性任务拆分机制(BTSM)**中,算法直接围绕完工时间差最大的机器人对进行任务重分配,其目标是最小化两者的时差:
min α ∈ 0 , 1 ∣ T m a x − ( T m i n + α ⋅ T t a s k ) ∣ \min_{\alpha \in 0, 1} |T_{max} - (T_{min} + \alpha \cdot T_{task})| α∈0,1min∣Tmax−(Tmin+α⋅Ttask)∣
其中, T m a x T_{max} Tmax 和 T m i n T_{min} Tmin 分别表示当前最大和最小完工时间。
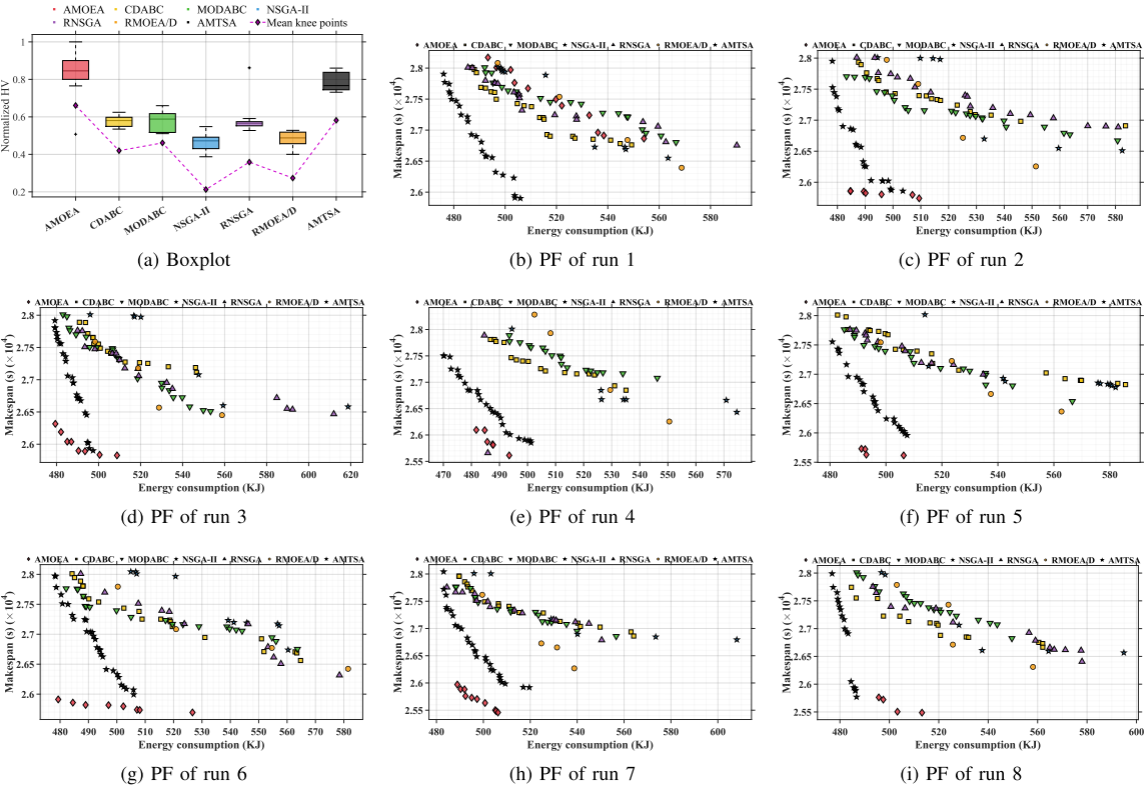
4.结果展示
5.参考文献
1 Chen P, Liang J, Qiao K J, et al. An adaptive multi-objective task splitting algorithm for agricultural multi-robot task allocationJ. IEEE Transactions on Evolutionary Computation, 2026.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx