前向欧拉法(Forward Euler)和双线性变换法(Tustin)是两种最常用的连续系统→离散系统转换方法,它们在精度、稳定性、计算复杂度上各有优劣,适合不同的应用场景。
前向欧拉法
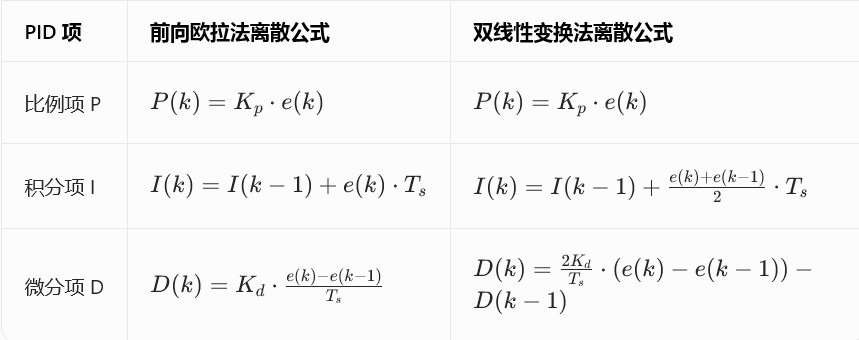
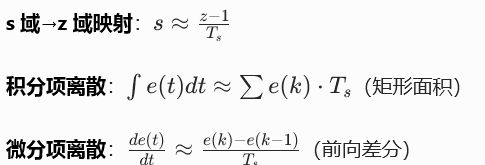
核心思想:用「矩形面积」近似积分,用「前向差分」近似微分。
双线性变换法
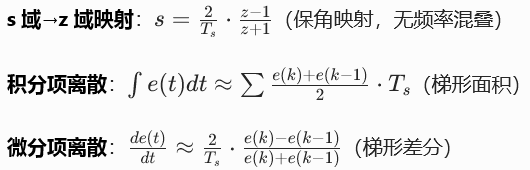
核心思想 :用「梯形面积」近似积分,是一种二阶精度的离散方法。
优势对比
| 对比维度 | 前向欧拉法 | 双线性变换法 |
|---|---|---|
| 精度 | 一阶精度(误差~O(Ts)) | 二阶精度(误差~O(Ts2)),精度更高 |
| 稳定性 | 稳定区域小(仅 z 平面左半圆),连续系统稳定,离散后可能不稳定 | 稳定区域大(s 左半平面→z 单位圆内),连续系统稳定则离散后一定稳定 |
| 频率特性 | 有频率混叠,高频段失真严重 | 无频率混叠,频率特性保真性好(需预畸变) |
| 计算复杂度 | 极低(仅需上一时刻状态,显式计算) | 中等(需当前 + 上一时刻状态,或隐式迭代) |
| 代码实现 | 极简单(一行代码搞定) | 稍复杂(需保存更多状态变量) |
前向欧拉法的优势
计算极快,代码极简,只需要上一时刻的状态,无需迭代,代码一行就能写完,几乎完全不占用 MCU 算力。
双线性变换法的优势
二阶精度,误差更小,双线性变换用「梯形面积」替代「矩形面积」,精度是前向欧拉的平方级。
稳定性极好,无频率混叠,双线性变换的 s 域→z 域映射是保角映射 ,能将连续系统的「左半平面极点」完全映射到离散系统的「单位圆内」------ 也就是说:只要连续系统是稳定的,双线性变换后的离散系统一定稳定 。对于高阶系统(如多自由度机械臂控制) 、带谐振的系统(如柔性负载),双线性变换的稳定性优势是前向欧拉无法比拟的。
频率特性保真性好,双线性变换没有频率混叠,能很好地保持连续系统的频率特性。对于滤波器设计(如低通滤波、陷波器),双线性变换是首选