来自斯坦福赵芮可团队提出了一种基于Kresling折纸结构的磁驱两栖毫米机器人,通过一个简单的折纸几何体,实现了运动与功能的高度集成。不同于传统小尺度机器人需要分别设计运动机构与功能模块,该工作利用折纸结构本身的几何特性,使机器人在旋转驱动下即可完成滚动、翻滚和水中推进等多模态运动,同时将折叠/展开转化为泵送机制,实现药物的可控释放,并利用旋转诱导的流体负压实现微尺度抓取与运输。
更重要的是,该机器人能够在陆地、水中以及气液界面实现连续运动,并在复杂非结构环境(如猪胃组织)中完成导航与给药操作,展示了折纸结构在软体机器人中"结构即功能"的设计潜力。这一工作本质上将"旋转"这一单一驱动机制扩展为统一的运动与功能实现方式,为微型机器人在生物医学场景中的应用提供了新的设计范式。
01
研究背景
在微型机器人与生物医学应用中,系统通常需要同时具备运动能力与功能能力(如给药、抓取)。然而,现有折纸机器人多采用结构与功能分离的设计思路,即通过不同组件分别实现运动与任务执行,这不仅增加了系统复杂性,也限制了其在毫米尺度下的集成与应用。
同时,现有小尺度机器人在环境适应性方面仍存在明显不足,大多数系统仅针对单一环境进行设计,例如只能在固体表面移动,或仅能在液体中游动,难以适应实际生物环境中常见的固-液耦合场景(如胃肠道、泌尿系统等)。
从运动机制来看,旋转类运动(如滚动、翻滚与旋转推进)因其结构简单、效率较高,被广泛应用于小尺度机器人中,并分别在陆地与水中展现出良好的运动性能。然而,这类运动通常依赖针对不同环境分别设计的结构形式,缺乏统一的实现框架。
因此,一个值得关注的关键问题在于:
是否可以通过单一结构与统一驱动机制,实现跨环境多模态运动,并进一步集成多种功能?
基于这一问题,本文尝试跳出"结构功能分离"的传统设计思路,利用折纸结构本身的几何特性,探索一种能够同时实现运动与功能耦合的微型机器人设计方法。
02
结构设计与驱动原理
本研究基于Kresling折纸结构构建毫米级机器人,该结构由周期性三角面组成,形成一个可折叠的中空圆柱体,兼具几何对称性与可变形能力。
从整体几何上看,Kresling结构的高度与直径接近,使其在运动特性上呈现出类似球体的行为特征,从而能够在外界驱动下实现稳定的滚动与翻滚运动;而从局部结构上看,其三角面具有一定倾角,在绕轴旋转时可与周围流体发生相互作用,产生类似螺旋桨的推进效果。
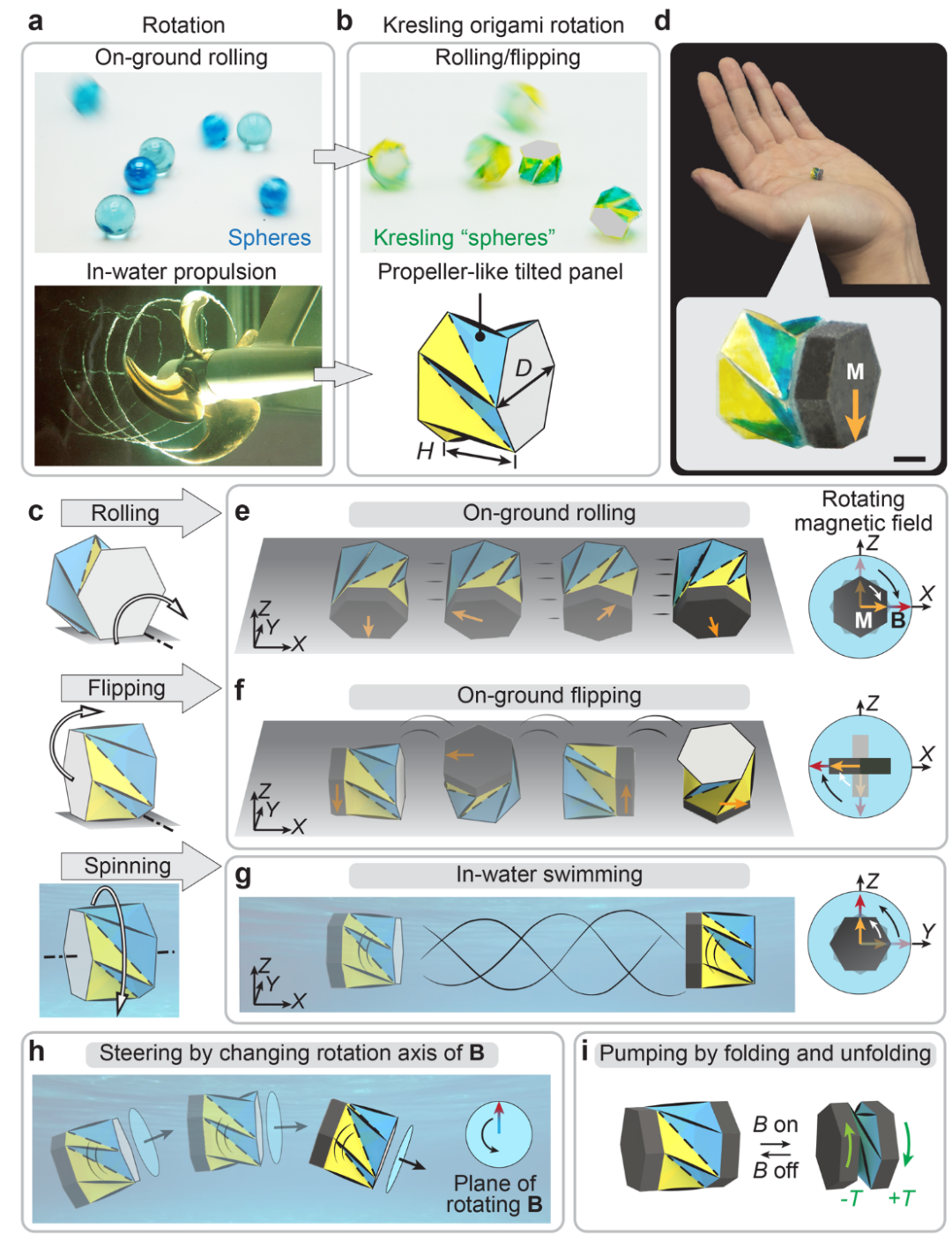
图1.磁驱动两栖折纸机器人的机制
在驱动方式上,机器人通过在结构端部集成磁性薄片,实现外部磁场驱动。磁性单元具有预设磁化方向,在施加磁场后,系统会产生与磁场方向相关的扭矩,从而驱动整体结构发生刚体旋转。
进一步地,通过调节外部磁场的旋转方向与旋转轴,可以实现不同形式的运动模式:当磁场在垂直于结构轴线的平面内旋转时,机器人表现为滚动;当磁场在平行于结构轴线的平面内旋转时,则诱导翻滚运动;而当磁场绕结构自身轴线旋转时,机器人则产生持续旋转,并在液体环境中形成推进。
由此可见,该系统通过单一结构与统一磁驱机制,实现了多种运动模式的切换,为后续功能集成与多环境适应奠定了基础。
03
多模态运动行为
基于Kresling结构的几何特性与磁驱动方式,该机器人能够在不同环境中实现多种运动模式,并在无需复杂控制的情况下完成自适应切换。
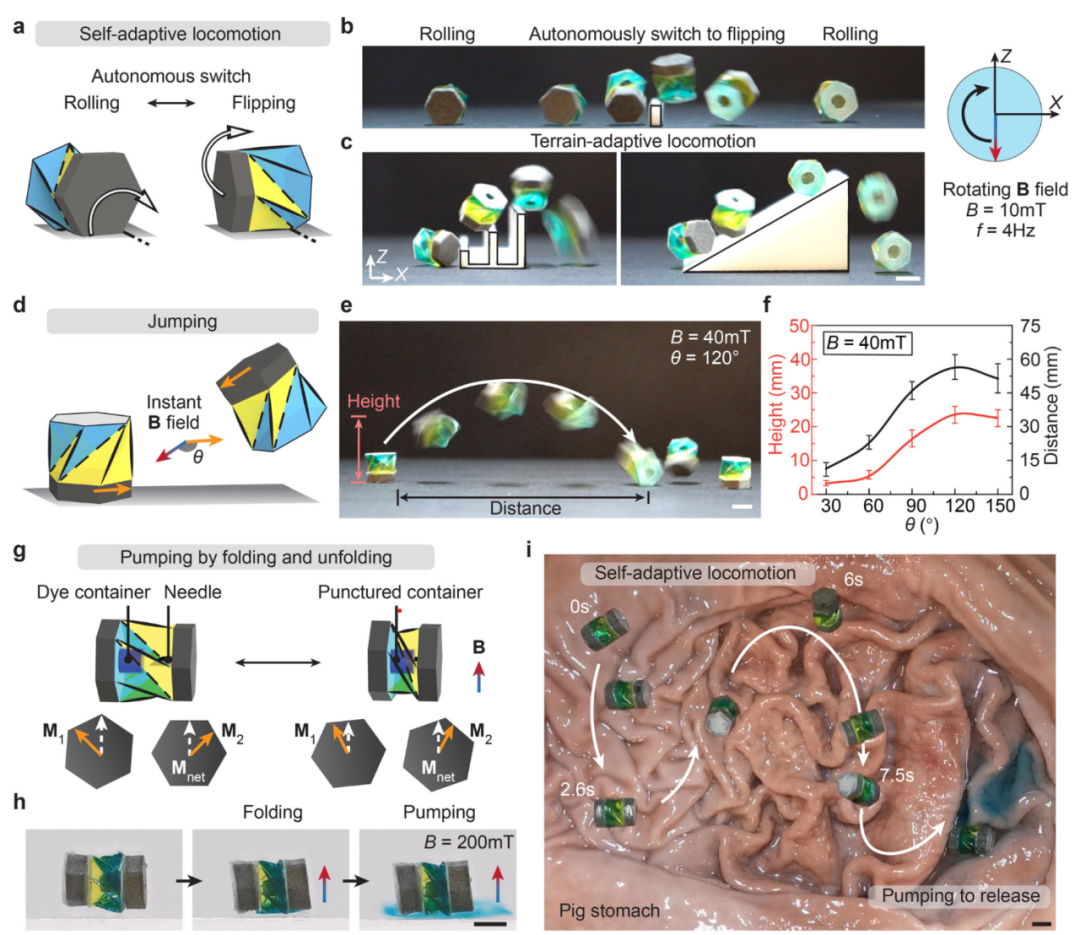
图2.自适应地面运动和药液控制输送
在陆地环境中,机器人主要表现为滚动(rolling)与翻滚(flipping)两种运动模式。当磁场在特定方向旋转时,机器人沿地面持续滚动;当其运动受到障碍干扰(如台阶或壁面)时,结构与环境之间的相互作用会改变其旋转轴,使其自动转变为翻滚模式,从而越过障碍。
这一过程无需改变外部控制信号,体现出一种基于结构与环境耦合的自适应运动机制。在复杂地形(如阶梯、斜坡及离散障碍阵列)中,机器人能够在滚动与翻滚之间动态切换,并持续沿预定方向前进,显著降低了控制复杂度。
此外,在较强磁场作用下,机器人还可通过瞬时能量释放实现跳跃运动,从而跨越尺寸较大的障碍。这种运动方式进一步拓展了其在复杂环境中的通行能力。
在液体环境中,机器人通过绕自身轴线的持续旋转实现推进。Kresling结构中的倾斜三角面在旋转过程中与流体相互作用,产生类似螺旋桨的推力,从而驱动机器人在水中前进。通过在结构中引入中心孔与侧向开口,可以优化流体通道,降低前端阻力,显著提升推进效率。
进一步地,该机器人还能够在气液界面实现稳定运动。通过在运动过程中捕获气泡并调节自身等效密度,机器人可在水面实现漂浮与推进,并在需要时重新进入液体环境,表现出良好的跨介质适应能力。
综上,该系统通过统一的旋转驱动机制,实现了滚动、翻滚、跳跃及水中推进等多种运动模式,并能够在不同环境之间平滑切换,为复杂任务执行提供了运动基础。
04
水中推进机制与跨介质运动
在实现多模态运动的基础上,该机器人进一步利用Kresling结构的可折叠特性与旋转过程中的流体效应,实现了多种功能的集成,从而突破了传统机器人中"运动与功能分离"的设计模式。
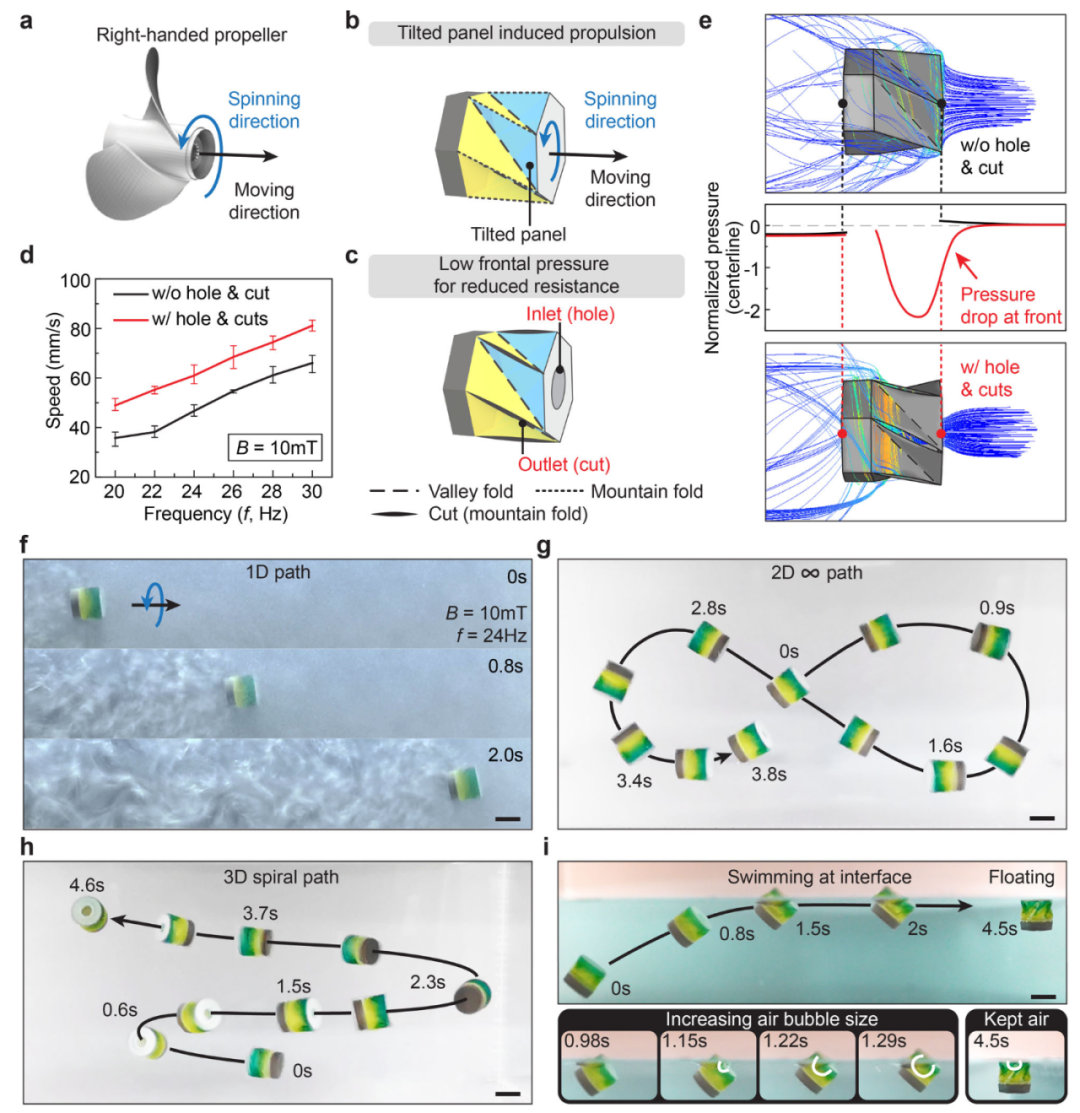
图3.水下和空气-水界面的游泳机制和导航
具体而言,Kresling结构由一系列倾斜分布的三角面构成,这些结构单元在旋转过程中与周围流体发生相互作用,其作用方式类似于螺旋桨叶片:在旋转过程中推动流体向后运动,从而产生反作用推进力,实现机器人在水中的前进。
为了进一步提升推进效率,作者在结构中引入了中心开孔与径向切口,使流体能够进入结构内部并从侧向排出,从而降低前端流动阻力并增强推进效果。实验结果表明,该优化结构相比封闭结构具有更高的游动速度,最高可达约11.9倍体长每秒。
数值模拟结果进一步表明,开放结构能够显著降低前端压力集中现象,使流体分布更加均匀,从而减少阻力并提升整体推进效率。
此外,该机器人还能够在气液界面实现稳定运动。在接近水面时,结构前端可捕获气泡,通过调节自身等效密度实现浮起;在改变姿态后,气泡释放,机器人重新进入水中。这种基于结构与界面相互作用的机制,使其具备跨介质运动能力。
05
综合任务与功能协同
在实现多模态运动与功能集成的基础上,作者进一步构建了跨环境任务场景,对机器人在复杂条件下的综合性能进行了验证。
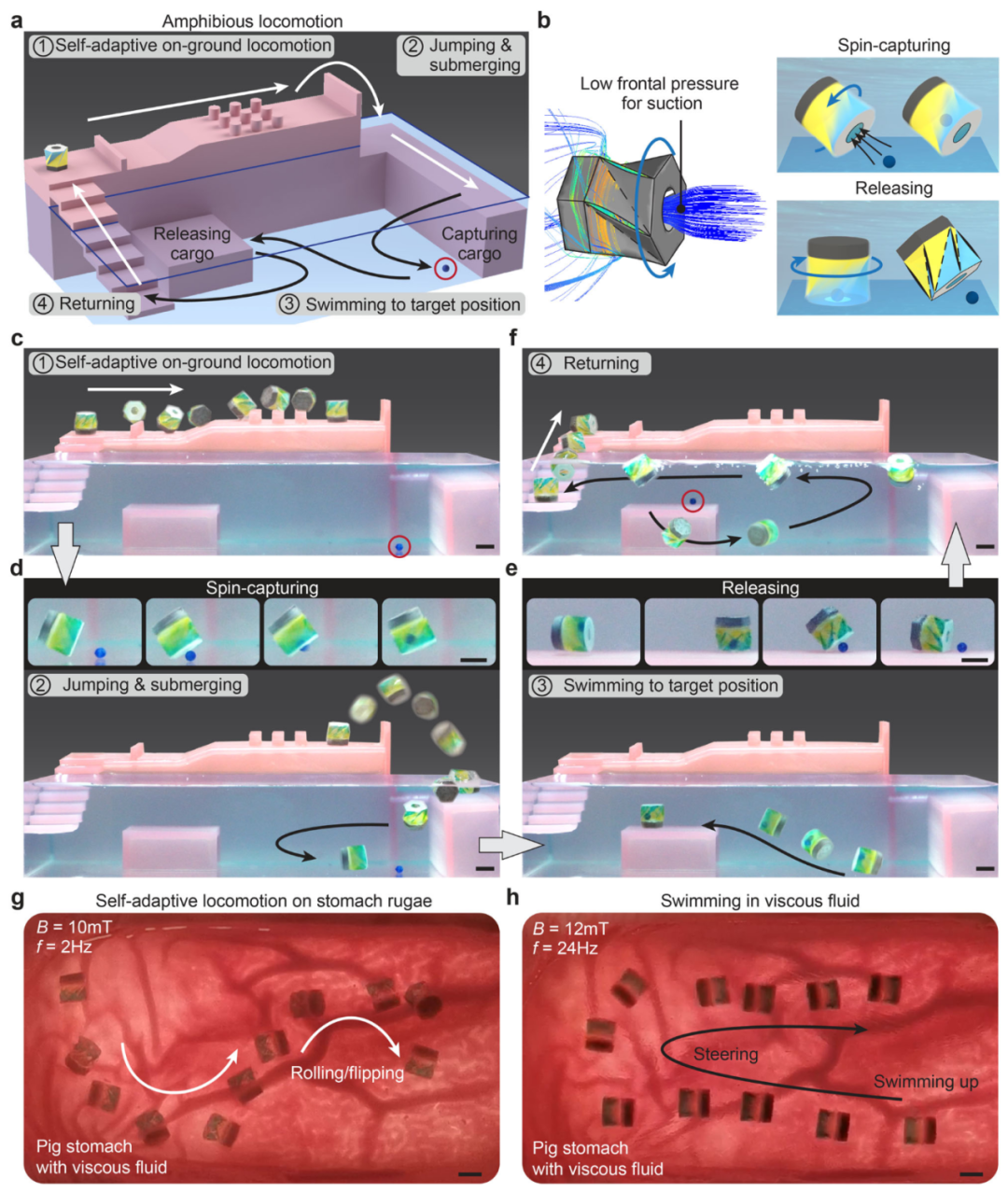
图4.陆地-水生混合环境中的两栖运动和有针对性的货物运输
在典型任务中,机器人首先在陆地环境中通过滚动与翻滚实现自适应移动,并跨越不同类型的障碍;随后通过跳跃进入水域,在液体中切换为旋转推进模式,实现稳定游动。
在接近目标物体时,机器人利用旋转过程中产生的局部低压区域,将目标吸入结构内部,从而完成物体的捕获;在运输至指定位置后,通过改变自身姿态,使物体在重力作用下释放,实现完整的"捕获---运输---释放"过程。
在整个过程中,机器人无需切换结构或引入额外执行机构,仅通过对外部磁场的调控,即可实现从陆地运动到水中推进,再到物体操控的连续任务执行。这种基于统一驱动机制的任务实现方式,显著降低了系统复杂性,同时提升了在多环境中的适应能力。
进一步地,机器人在执行任务后还能够通过水中游动、界面运动以及陆地滚动的组合,实现路径回溯,完成闭环任务流程,体现出较高的系统完整性。
06
结论
-
该研究基于Kresling折纸结构,实现了单一结构下的多模态运动与多功能集成,突破了传统"运动---功能分离"的设计模式。
-
通过统一的旋转驱动机制,机器人能够在不同环境中自适应切换运动形式,并将运动过程直接转化为给药与抓取功能。
-
系统在复杂环境中表现出结构驱动的自适应能力,无需复杂控制即可完成跨地形与跨介质运动。
-
该工作表明,折纸结构可作为运动与功能的统一载体,为微型软体机器人提供了一种更加简洁高效的设计范式。